Appearance
可视化编程简介
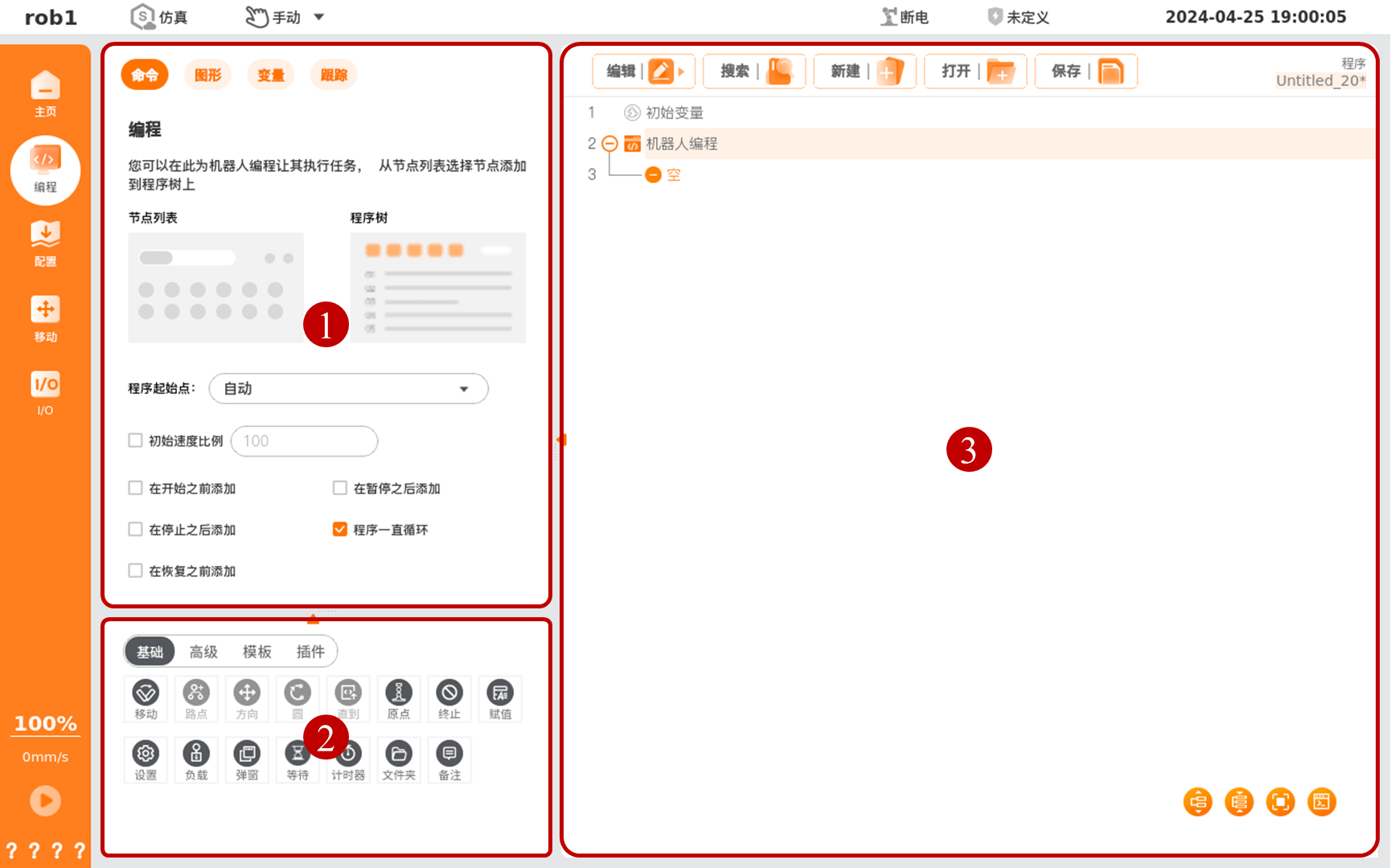
通过【编程】界面可创建或编写机器人运行程序。
| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | 配置界面 | 包含配置选项卡:命令、图形、变量、跟踪 |
| 2 | 程序节点界面 | 包含程序节点分类、程序节点列表 |
| 3 | 程序界面 | 包含程序管理工具栏、程序树、程序树工具栏。 |
配置选项卡
配置选项卡包含【命令】、【图形】、【变量】和【跟踪】几个选项,用户可随时查看各选项卡下的内容。
命令
【命令】界面内可以配置在程序树中选择的节点。在程序树中选择程序节点后,【命令】界面可以显示/设置该程序节点的可配置项。
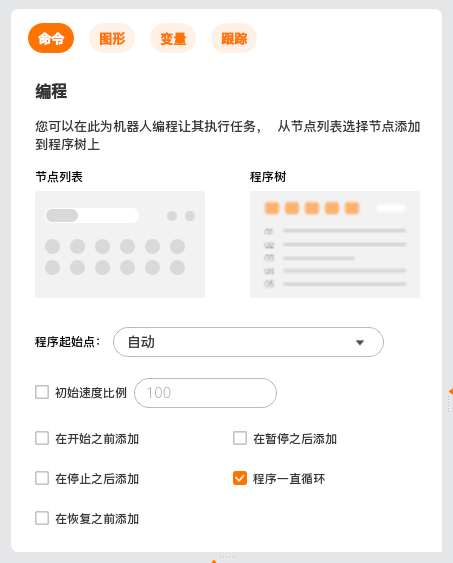
程序起始点:设置程序运行的起始路点。
- 自动:单击【运行】按钮后,先进入【移动】界面,移动机械臂至初始位置,再单击【确定】开始运行程序。
- 忽略:单击【运行】按钮后,机械臂移动至初始位置,开始运行程序。
初始速度比例:勾选后设置机器人程序运行的初始速度比例。
在开始之前添加:勾选后可添加在主程序开始运行之前执行的序列。
在暂停之后添加:勾选后可添加在主程序暂停运行之后执行的序列。
在恢复之前添加:勾选后可添加在主程序恢复运行之前执行的序列。
在停止之后添加:勾选后可添加在主程序停止运行之后执行的序列。
程序一直循环:勾选后可让主程序连续运行。
图形
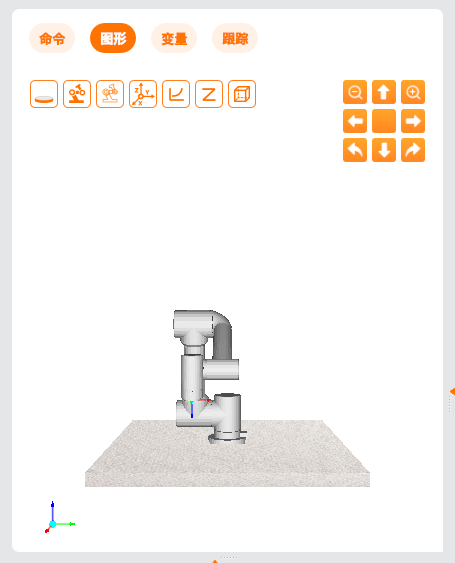
【图形】界面显示当前机器人的 3D 模型,模型的动作与真实机器人的动作一致。
| 图标 | 名称 | 说明 |
|---|---|---|
| 上移 | 向上平移机器人 | |
| 下移 | 向下平移机器人 | |
| 左移 | 向左平移机器人 | |
| 右移 | 向右平移机器人 | |
| 左转 | 顺时针旋转机器人 | |
| 右转 | 逆时针旋转机器人 | |
| 放大 | 放大机器人的尺寸 | |
| 缩小 | 缩放机器人的尺寸 | |
| 复位 | 复位机器人的位置和视图 |
| 图标 | 名称 | 说明 |
|---|---|---|
| 底座 | 关闭/显示底座 | |
| 机械臂 | 关闭/显示机械臂 | |
| 目标位姿 | 关闭/显示目标路点的位姿 | |
| 用户坐标系 | 关闭/显示用户坐标系 | |
| 轨迹 | 关闭/显示轨迹 | |
| 路点 | 关闭/显示路点 | |
| 障碍物 | 关闭/显示障碍物 |
变量
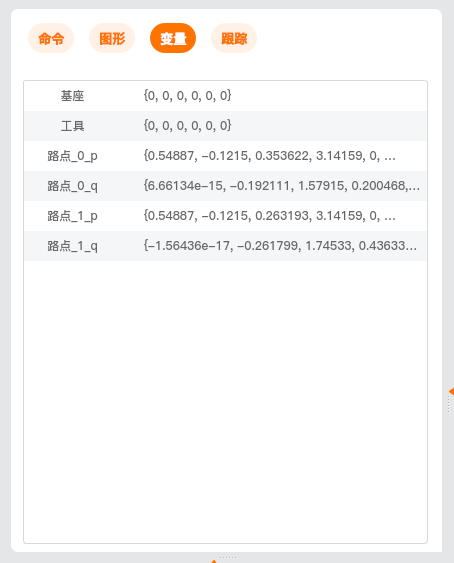
【变量】界面显示正在运行工程的基坐标系、工具坐标系、路点关节角、工具末端 TCP 位姿以及程序和配置中所有的变量和值,与 “主页 > 变量” 的显示一致。
变量种类
- 程序变量:该变量仅适用于正在运行的程序,且变量值在程序停止后即丢失,属于常规程序变量,具体请参见 “4.3.6 赋值”。
- 配置变量:该变量可以用于多个程序,且变量名和变量值在机器人安装期间持续存在,属于保持型变量,具体请参见 “5.1.7 变量”。
- 脚本变量:该变量来自脚本文件,可被赋予不同的变量类型。脚本变量不出现在【编程】界面或【配置】界面中。机器人程序使用脚本变量来存储有关路点的信息。
以系统是否保存变量值、变量是否可应用于多个程序为分类标准,变量可以分为以下两种类型:
- 保持型变量:这些变量可以用于多个程序,且变量名和变量值在机器人安装期间持续存在。保持型变量在 AUBO SCOPE 软件或者控制器重启后会保持它们的值,如配置变量。
- 常规程序变量:这些变量仅适用于运行程序,且变量值在程序停止后即丢失,如程序变量。
数据类型
布尔型(Bool):布尔型变量,其变量值为 true/false。
整型(Integer):整型变量,其变量值为整数。
浮点型(Float):浮点型变量,其变量值为浮点数值。
字符串型(String):字符串型变量,其变量值为字符串类型值,需使用单引号
'或双引号"包裹。位置型(Pose):位置型变量,其变量值为机器人路点信息,包含 6 位参数,分两种情况:
- 在直线运动下,位置型变量的前 3 位为位置参数,单位为 mm,后 3 位为姿态参数,单位为 rad。
- 在关节运动下,位置型变量的 6 位参数分别为六个关节的角度,单位为弧度。
跟踪
【跟踪】界面实时显示当前工程的起始、运行程序节点的时间,单击记录列表中的【变量】按钮可查看详细信息,方便调试程序。

程序界面
程序界面可以显示或编辑程序树、管理程序文件等。
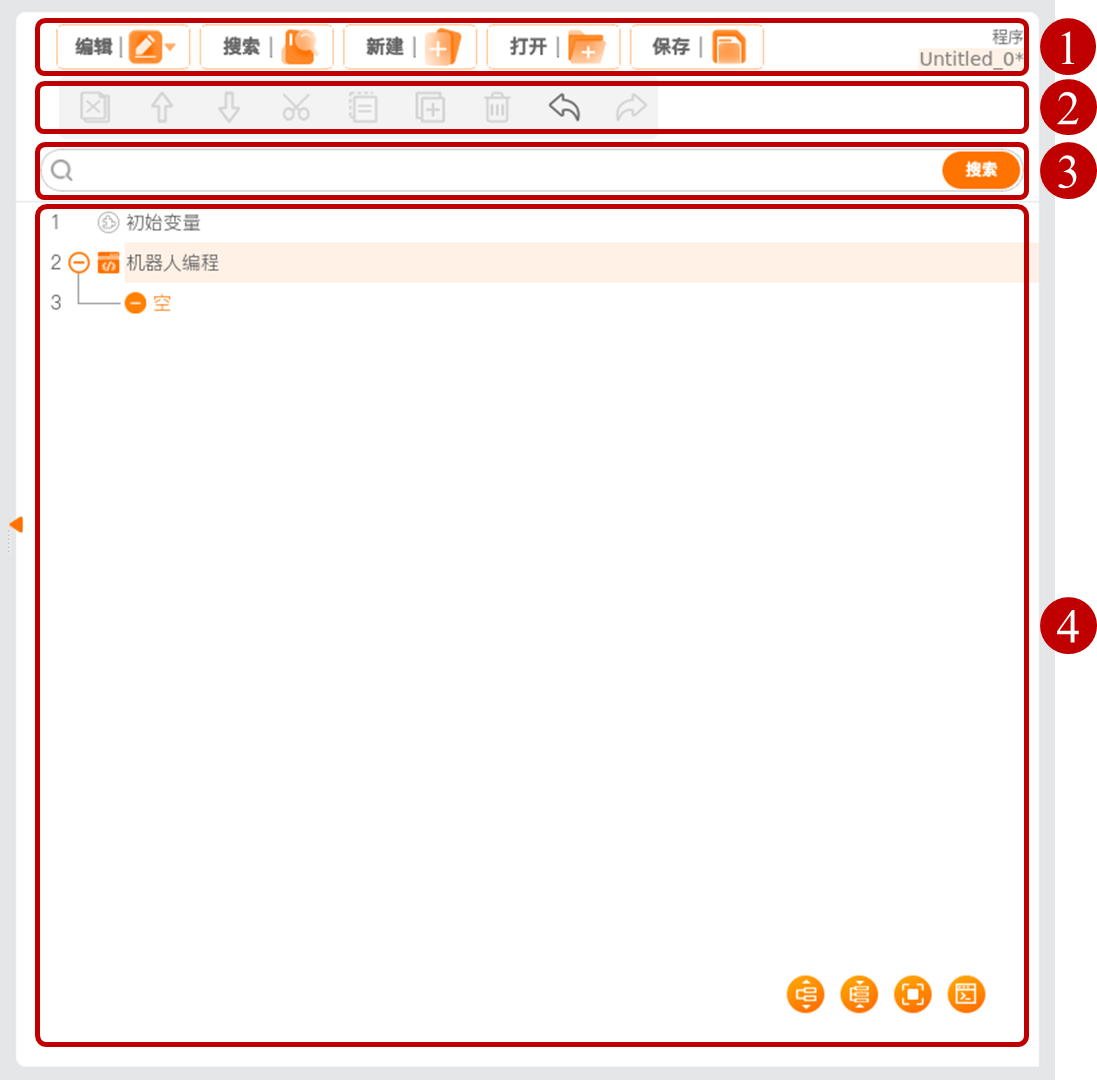
| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | 程序管理工具栏 | 管理程序文件。 |
| 2 | 程序树工具栏 | 编辑程序树中的节点。 |
| 3 | 搜索框 | 输入内容搜索程序树的节点。 |
| 4 | 程序树 | 显示或编辑程序。 |
程序管理工具栏

| 序号 | 名称 | 说明 |
|---|---|---|
| 1 | 编辑 | 显示/隐藏程序树工具栏。 |
| 2 | 搜索 | 显示/隐藏搜索框,输入内容搜索程序树的节点。 |
| 3 | 新建 | 新建程序文件。 |
| 4 | 打开 | 打开程序文件。 |
| 5 | 保存 | 保存程序文件。 |
| 6 | 程序文件名称 | 显示当前程序文件的名称。 单击程序文件名称,查看当前程序文件关联的配置文件名称等信息。 |
- 如果使用 I/O 接口或控制手柄的启停键控制程序的启动/停止,请先保存程序文件,否则将无法通过 I/O 接口或控制手柄的启停键启动程序。具体 I/O 功能设置请参见 “5.1.2 I/O 设置”。关于控制手柄的使用请参见硬件用户手册。
- 程序完成编写后,若绑定的配置文件发生修改,须先保存配置文件,再保存程序文件,否则可能发生程序运行错误。
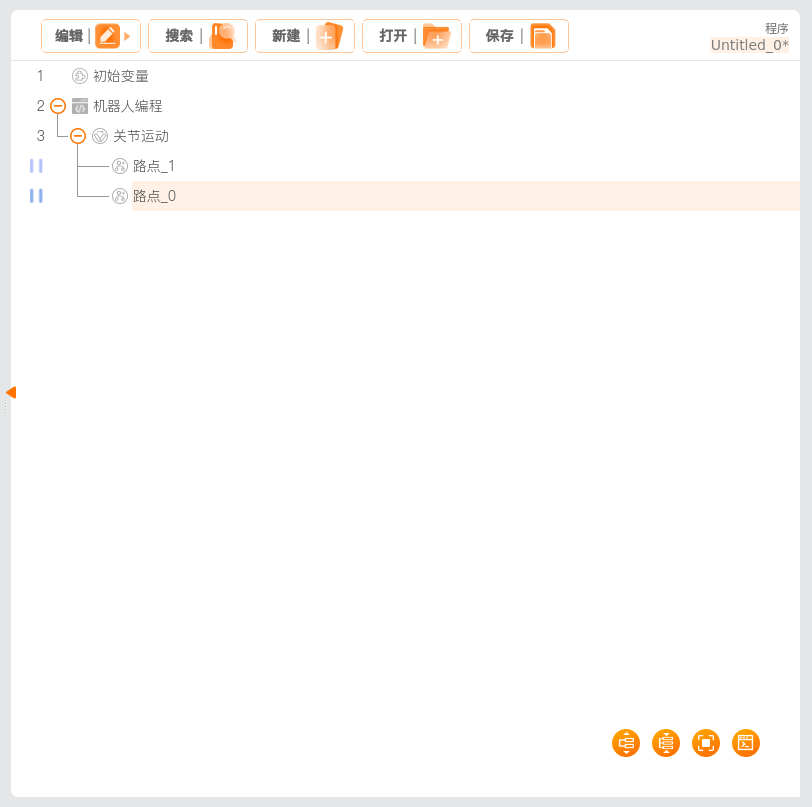
程序树
图形化编程的命令添加到程序树中,可以称为程序节点,简称节点。有的节点下可以包含其他节点,如【移动】节点下可以包含【路点】节点,这种包含其他程序节点的程序可以称为程序块,即程序块是由多个程序节点组成的。
- 程序块的展开与收起
- 单击程序块前的
 或
或 .png) 可展开或收起程序块。
可展开或收起程序块。 - 双击程序块名称可展开或收起程序块。(推荐)
- 单击
 或
或  可展开或收起程序树中所有的程序块。
可展开或收起程序树中所有的程序块。
- 单击程序块前的
- 程序块的展开与收起
初始变量: 是在启动程序时赋予程序变量的第一个值。在主程序之前默认添加【初始变量】节点,在【初始变量】的命令界面内(简称【初始变量】界面),单击【变量】下拉框选择初始变量,单击【表达式】输入框为初始变量赋值。
- 保持上次运行的值:勾选后,程序运行停止后,初始变量的值替换为程序停止时初始变量的值。如果程序暂停后加载了新程序,则无法使用先前程序停止时初始变量的值,先前程序初始变量的值恢复为用户设置的初始值。
用户需先创建一个变量,才能正常使用该功能。如果不设置初始变量,将直接运行主程序。
当程序树中的节点不符合预设的逻辑时,系统会使用高亮黄色显示相关节点。当节点设置符合预设逻辑时,系统以正常黑色显示该节点。
断点:单击程序树中的行号,可在该行增加断点,最新设置的断点颜色较深。当程序运行至该行时直接进入暂停状态,此时单击菜单栏中的【步进】按钮,每单击一次,程序运行一行,实现单行程序的运行。
程序树工具栏图例说明
| 图标 | 描述 |
|---|---|
| 向上,节点位置向上移动。 | |
| 向下,节点位置向下移动。 | |
| 撤销,撤销对命令的更改。 | |
| 重做,重做对命令的更改。 | |
| 剪切,剪切一个节点,并允许将其粘贴至程序树的其他位置。 | |
| 复制,复制一个节点,并允许将其粘贴至程序树的其他位置。 | |
| 粘贴,粘贴剪切或复制的节点。 | |
| 删除,删除一个节点。 | |
| 抑制,抑制一个节点,程序运行时将直接跳过被抑制的程序节点。 被抑制的程序节点也可以解除抑制。 使用【抑制】可以在不破坏原始内容的条件下,快速更改程序。 | |
| 展开所有节点。 | |
| 收起所有节点。 | |
| 全屏,程序树全屏显示。 还原,程序树还原默认展示。 | |
| 查看脚本程序。 查看图形程序。 |