Appearance
模板程序节点
模板程序节点,是为方便用户实现复杂功能的内置节点,包括脚本、码垛、轨迹回放等功能。模板程序节点可以应用在一些特定的场景下,例如:脚本 可方便用户编写脚本;码垛 用于码垛、卸垛的任务。
脚本
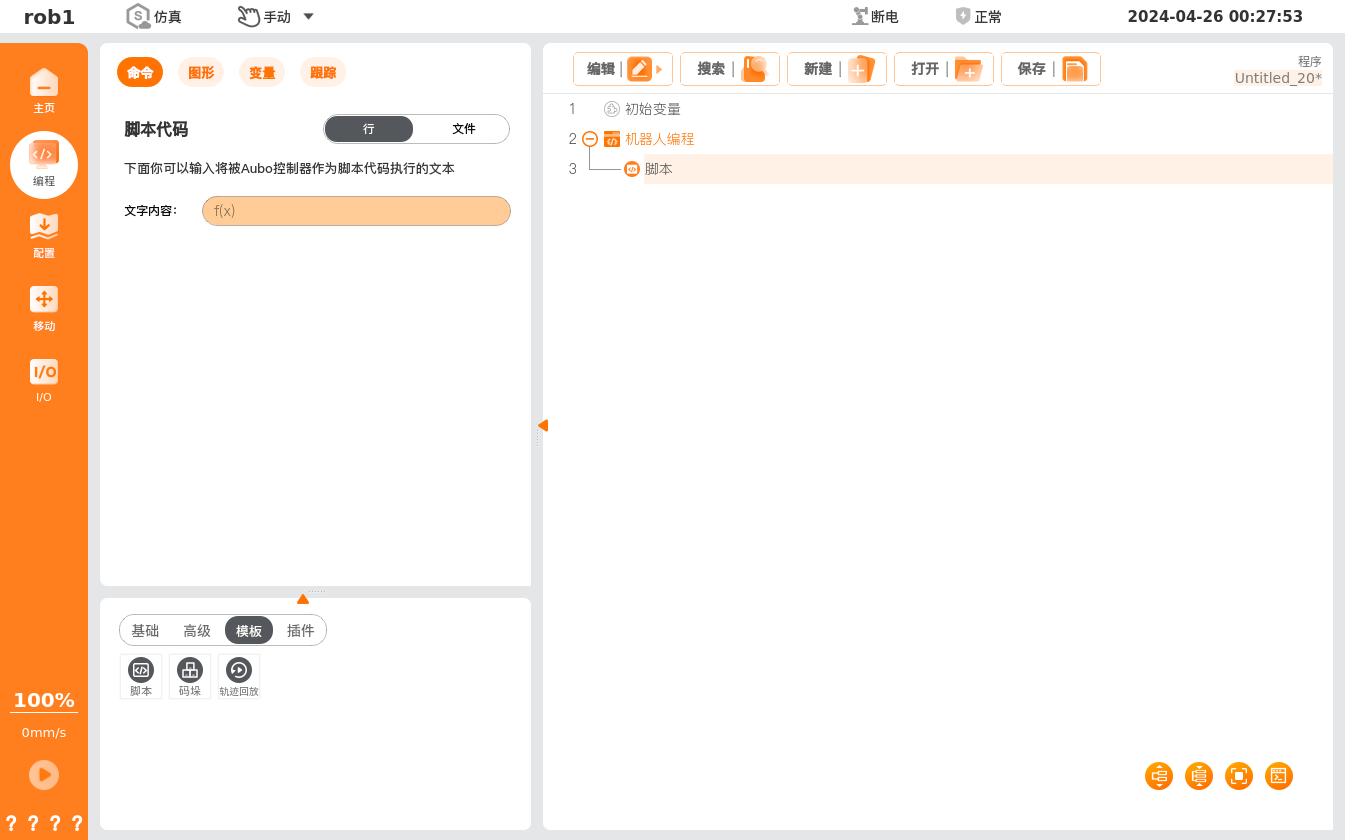
【脚本】命令,添加脚本行或脚本文件。
设置
行:通过编辑器输入作为脚本代码执行的文本。
文件:可以打开或另存脚本文件,并对已打开的脚本文件进行编辑、清除、另存等操作。
- 编辑脚本前,请先打开已保存的脚本或将脚本【保存为】,然后单击【编辑】编辑脚本,否则无法编辑脚本。
- 脚本编辑器自带语法检查工具,当输入正确脚本代码时,编辑器背景为白色,否则编辑器背景为黄色。只有输入正确脚本的代码,才可保存至脚本文件中。
码垛
【码垛】命令,创建码垛任务或卸垛任务。用户通过配置参数来实现码垛和卸垛任务,该命令是让机器人对不同模式的多层中的不同物品执行可重复操作的模板。
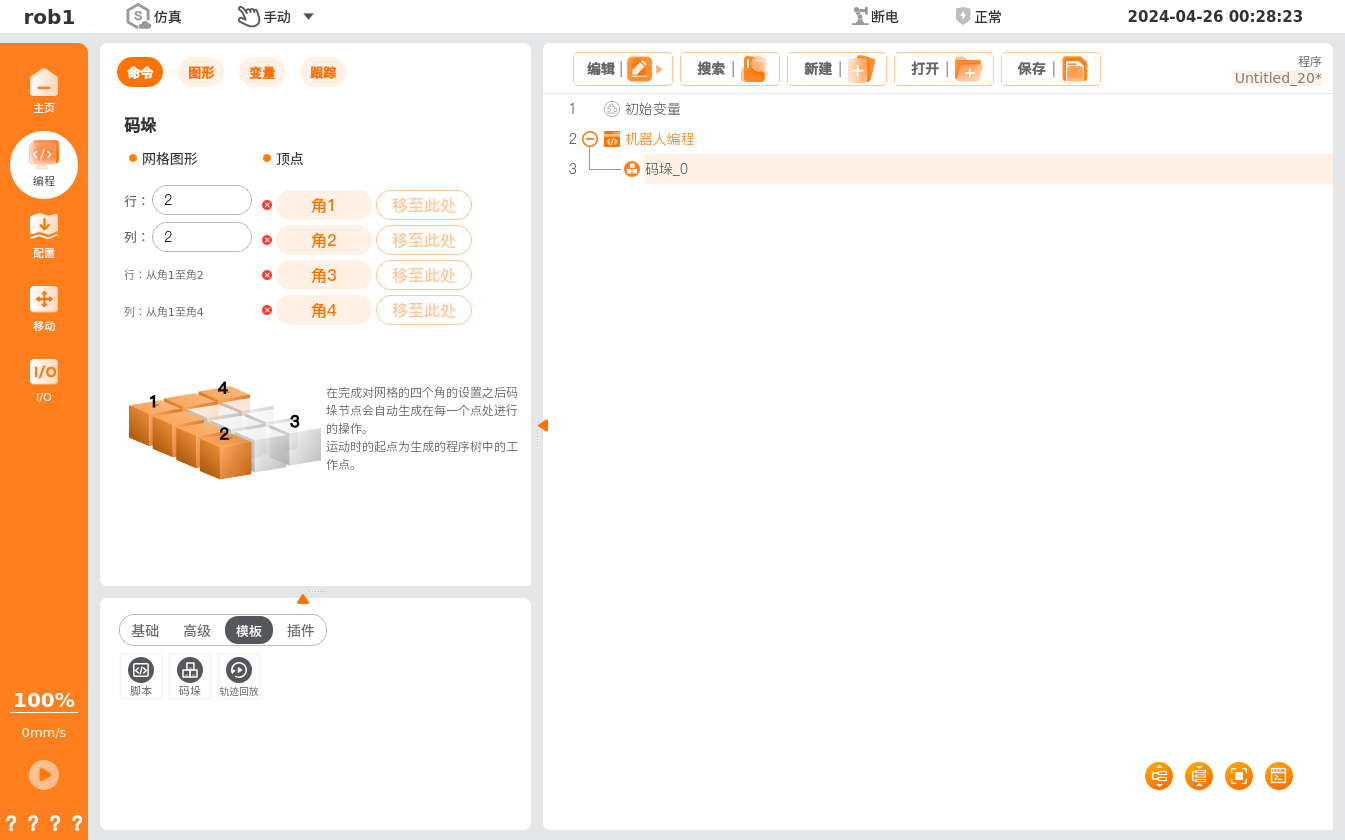
- 网格图形:码垛的行列信息。
- 顶点:码垛的图形的四个顶点,单击【角1】~【角4】依次设置四个角的位姿。
- 完成码垛顶点的设置后,【码垛】节点块内将生成在每个点处需进行的操作。其中机器人码垛的起点是工作点。
- 接近点:末端工具的起点。
- 工作点:码垛的第一个点。
- 工具动作:末端工具的动作。
- 退出点:末端工具的终点。
轨迹回放
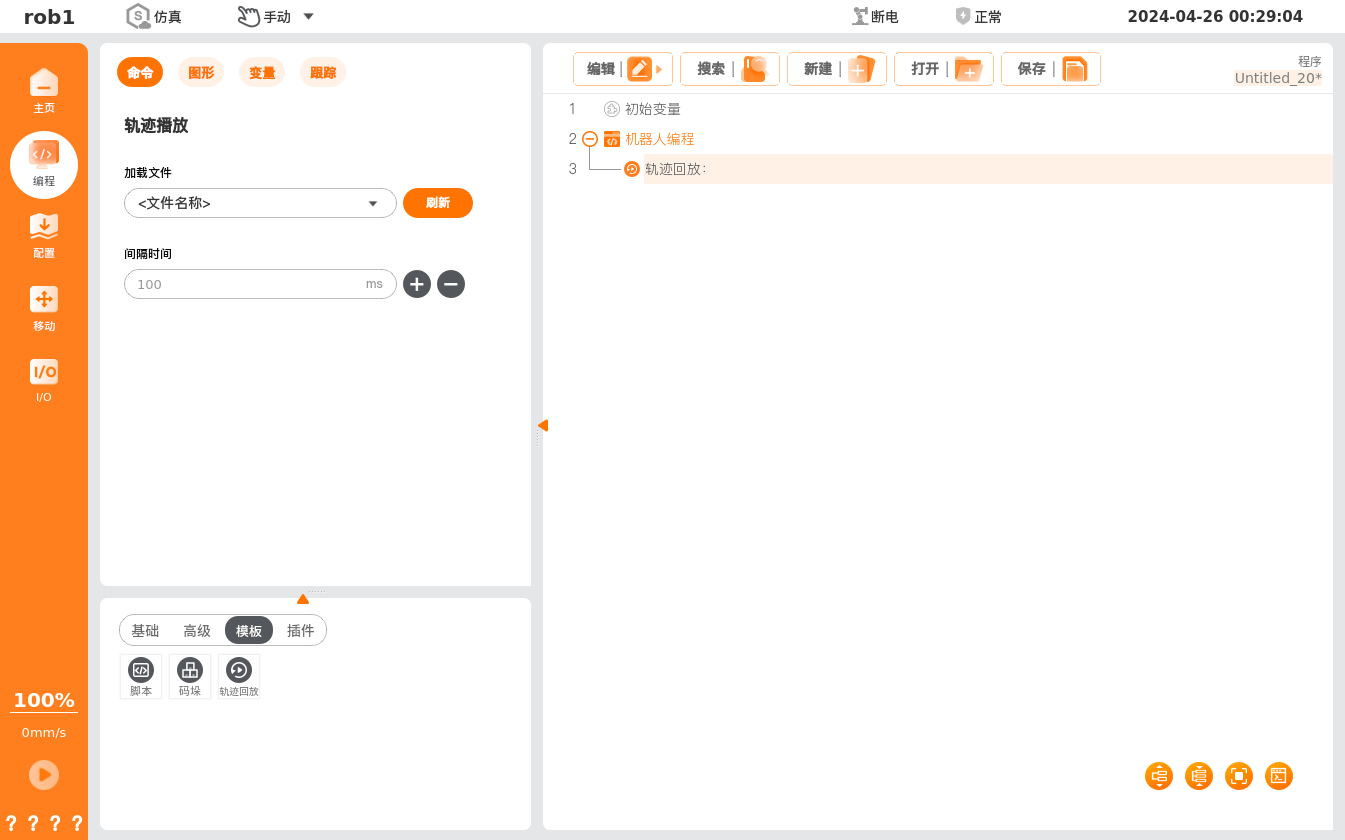
【轨迹回放】命令,可以在程序中插入轨迹文件,当程序运行至 轨迹回放 节点时,播放轨迹文件,机器人按照文件中记录的轨迹运动。轨迹文件是记录机器人运动轨迹的文件,一般存储在安装配置文件中,关于轨迹文件的生成请参见 “5.1.8 记录”。
设置
- 加载文件:单击 “加载文件” 或
 图标,选择轨迹文件,程序运行至该节点后进行轨迹回放。
图标,选择轨迹文件,程序运行至该节点后进行轨迹回放。 - 刷新:单击后可以刷新 “加载文件” 的下拉菜单。
- 间隔时间:调整轨迹运行的速度。