快速入门
用户手册
SDK 与 API
进行中活动
Appearance
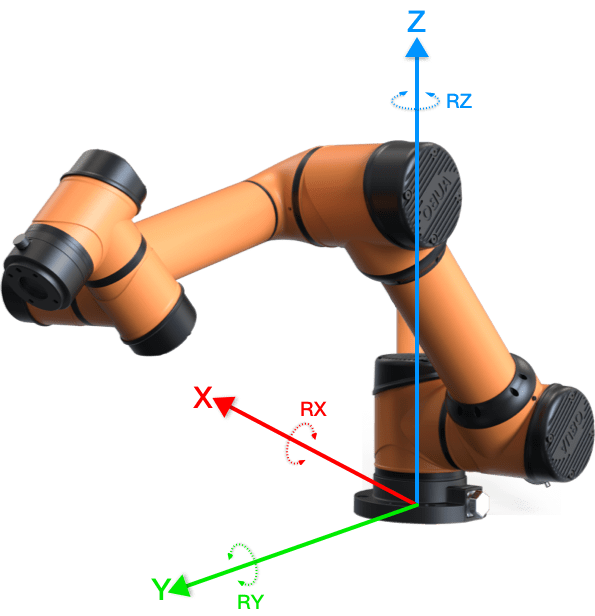
机器人包括两个预定义坐标系,其位姿由机器人自身的配置定义。
基坐标系的原点位于机器人机座的中心。
工具坐标系的原点位于当前 TCP 的中心。