Appearance
ARCS 脚本的 API 查看方法
可以通过SDK API手册查找LUA脚本的API定义。
步骤如下:
打开SDK API 手册链接:ARCS SDK API: 首页 (aubo-robotics.cn)
点击“文件”,可以查看到所有SDK头文件的列表

API分类模块化,一个.h头文件对应一个模块。模块分类如下:
模块名称 头文件名 说明 力控模块 force_control.h 力控接口 IO控制模块 io_control.h IO控制接口 运动控制模块 motion_control.h 运动控制接口 机器人算法模块 robot_algorithm.h 机器人算法相关的对外接口 机器人配置模块 robot_config.h 获取机器人配置接口,如获取DH参数、碰撞等级、安装位姿等等 机器人管理模块 robot_manage.h 机器人管理接口,如上电、启动、拖动示教模式等 机器人状态模块 robot_state.h 获取机器人状态接口,如关节速度、关节角度、固件/硬件版本 数学模块 math.h 数学方法接口,如欧拉角与四元数转换、位姿的加减运算 寄存器模块 register_control.h 寄存器操作接口,用于三个模块之间的数据交换功能 运行时模块 runtime_machine.h 脚本解释器运行时接口, 可以实现脚本解释器的暂停、脚本解释器的设置/取消断点 串口通信模块 serial.h 串口通信接口 socket通信模块 socket.h Socket通信接口 同步运行模块 sync_move.h 同步运行接口 系统信息模块 system_info.h 获取系统信息接口,如接口板的版本号、示教器软件的版本号 日志系统模块 trace.h 向控制器日志系统注入日志方面的接口 根据模块查找需要的API定义。例如,想查找关节运动的API定义,关节运动属于运动模块,运动模块对应motion_control.h。所以,点击“motion_control.h”。

点击“arcs::common_interface::MotionControl”,可查看其成员函数。

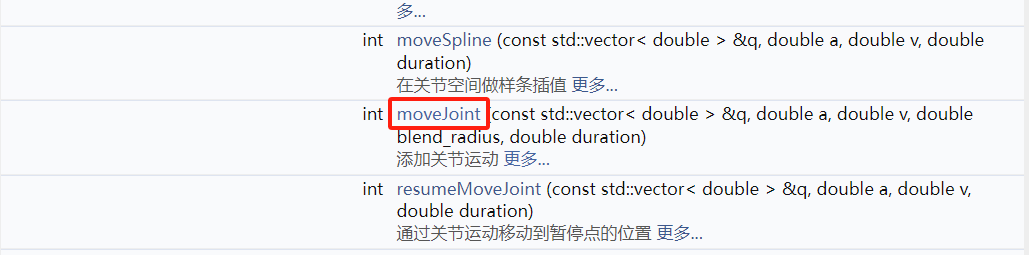
成员函数如下图所示:

找到关节运动对应的函数名——moveJoint,点击“moveJoint”
moveJoint函数的定义如下图所示,其中,Lua函数原型就是moveJoint的LUA语法定义。
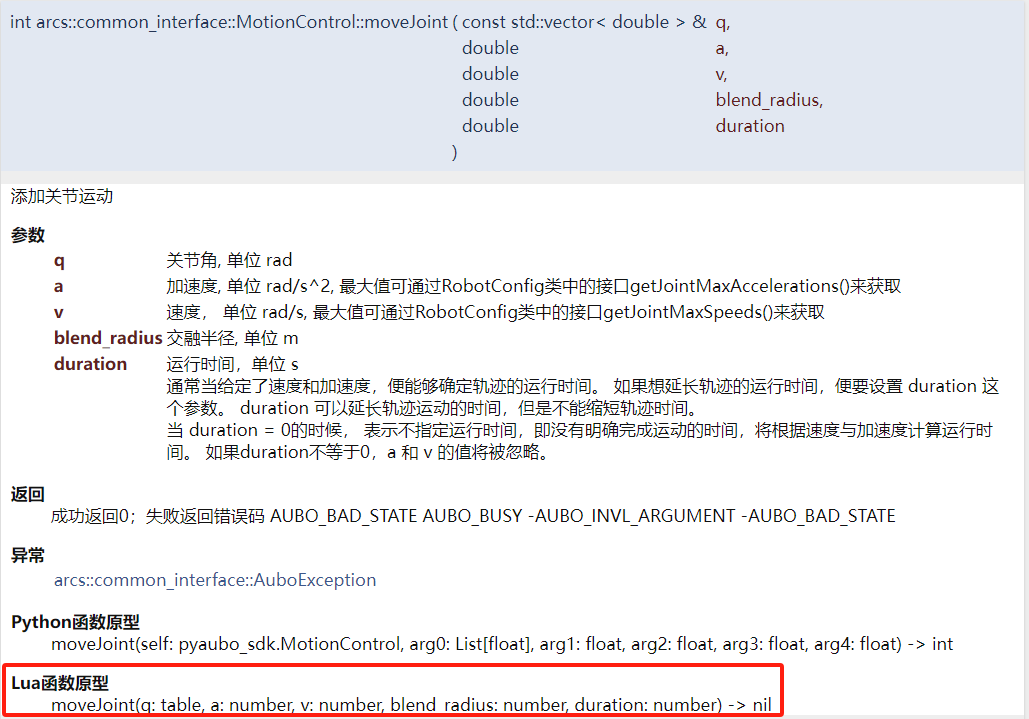
根据上面moveJoint的LUA函数定义,moveJoint示例如下:
pi = 3.14159265358979323846 -- 关节角,单位:弧度 q = {-0.93/180*pi, -15.77/180*pi, 97.57/180*pi, 23.33/180*pi, 89.99/180*pi, -1.82/180*pi} moveJoint(Waypoint_1_q, 1, 1, 0, 0)
机械臂以1rad/s的速度和1rad/s^2的加速度做关节运动到路点[-0.93°, -15.77°, 97.57°, 23.33°, 89.99°, -1.82°]。