Appearance
在示教器中使用脚本的方法
以下是在示教器中新建、编写和运行脚本的操作步骤:
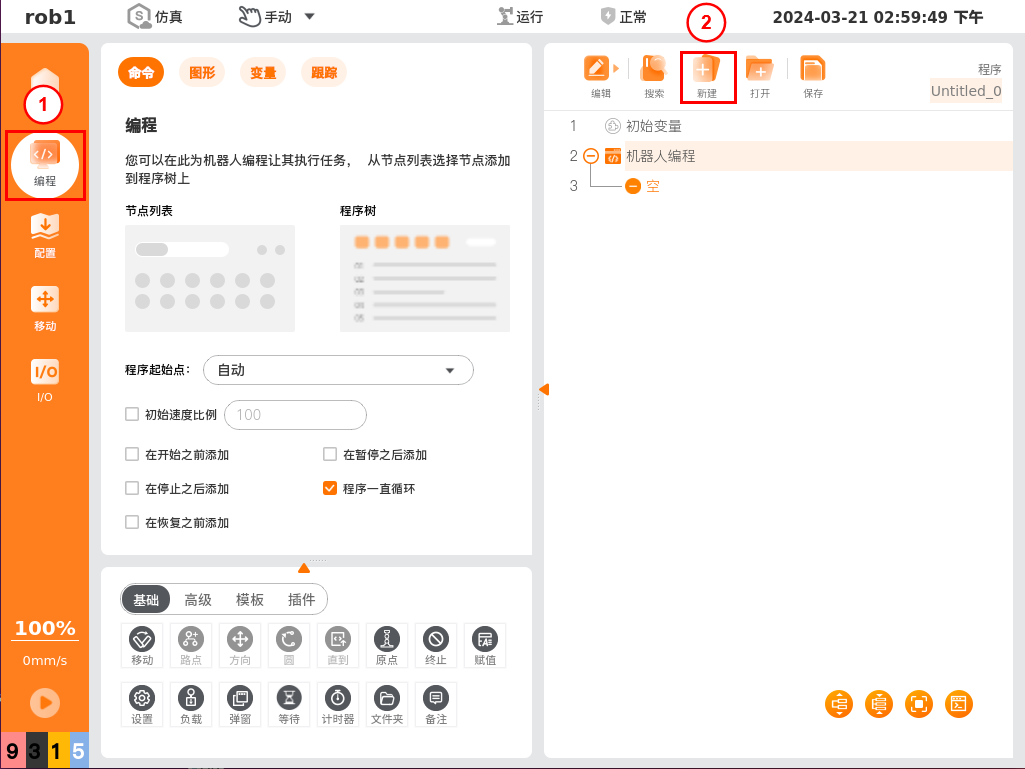
在“编程”界面中,点击“新建”。新建一个工程。
在“模板”程序节点中,选择“脚本”。

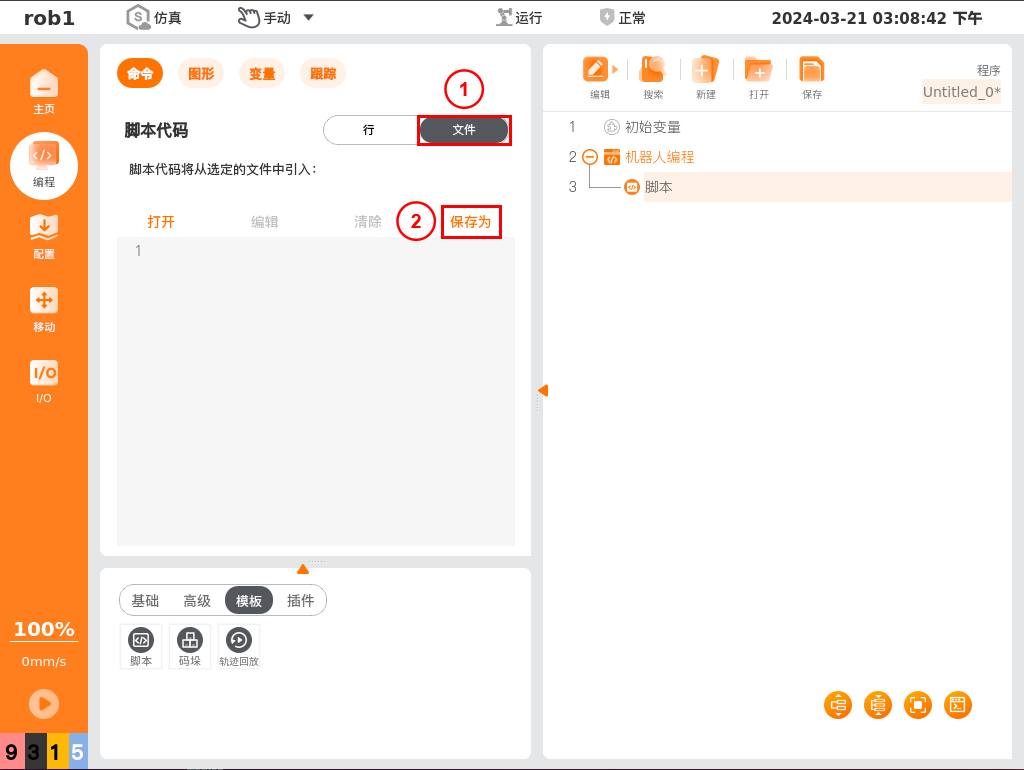
脚本代码分为“行脚本”和“脚本文件”这两种类型。下面示例讲解的是脚本文件。
选择“文件”,点击“保存为”。
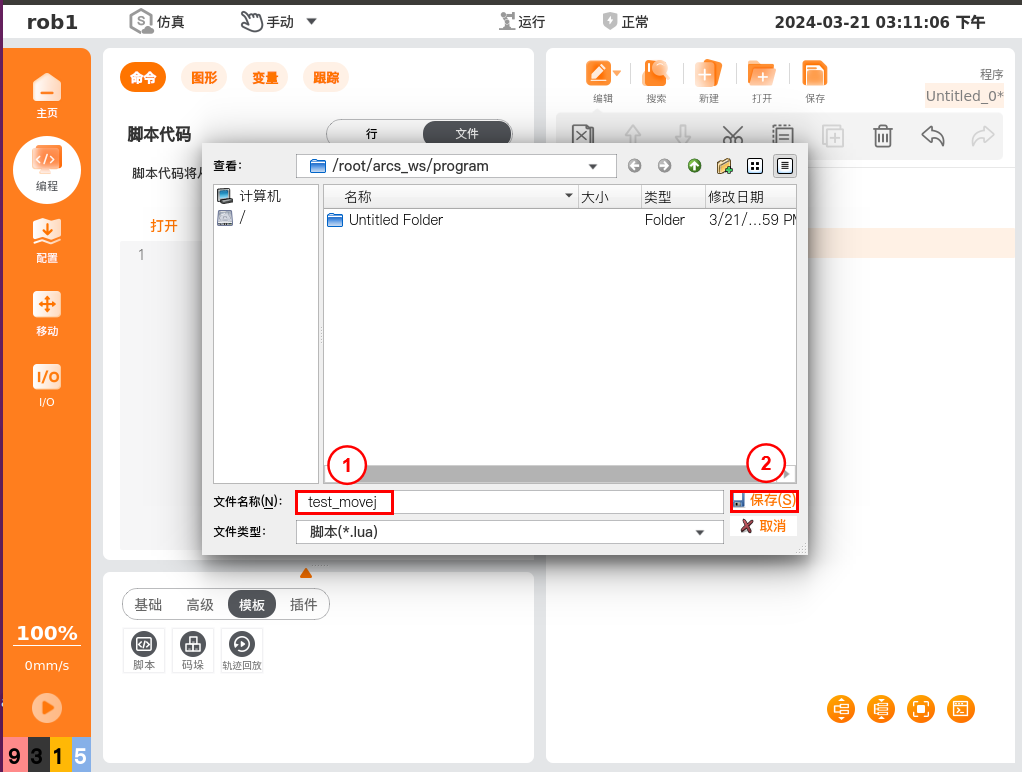
输入脚本文件名,点击“保存”。
点击“编辑”
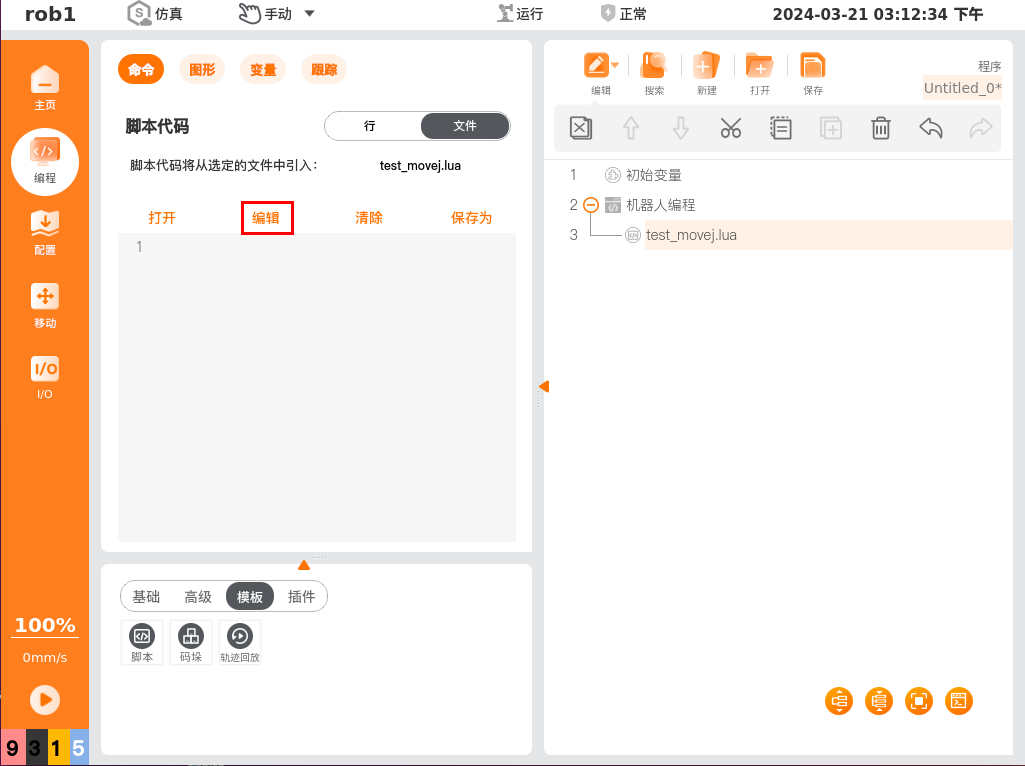
将下面代码添加进去。
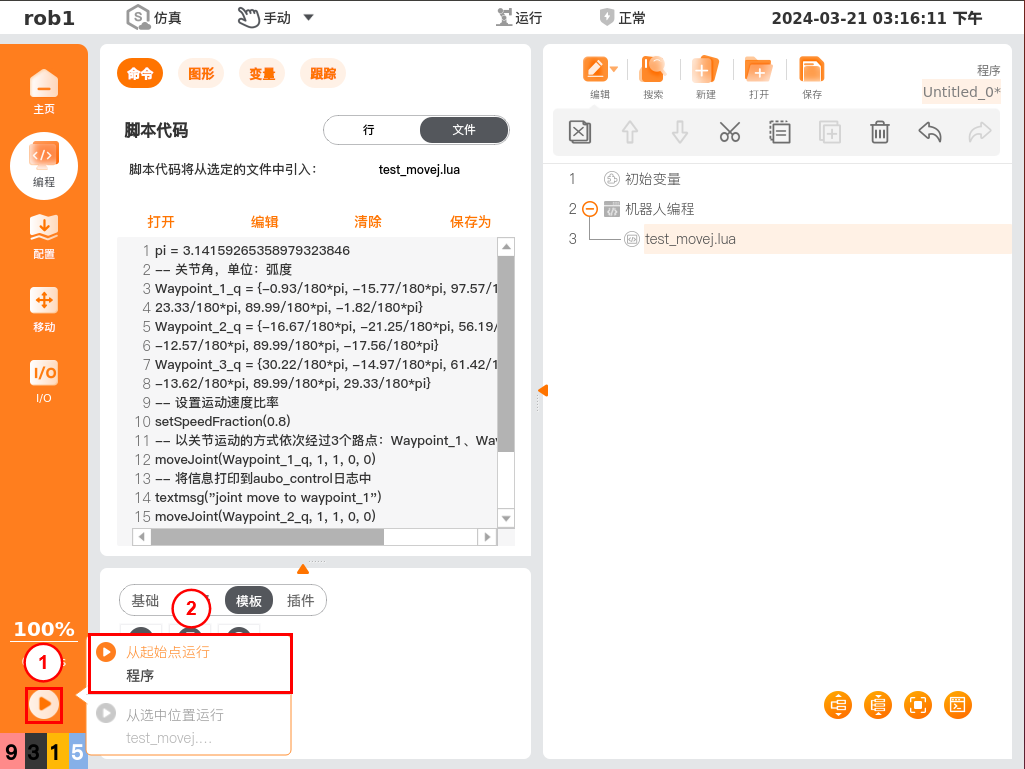
luapi = 3.14159265358979323846 -- 关节⾓,单位:弧度 Waypoint_1_q = {-0.93/180*pi, -15.77/180*pi, 97.57/180*pi, 23.33/180*pi, 89.99/180*pi, -1.82/180*pi} Waypoint_2_q = {-16.67/180*pi, -21.25/180*pi, 56.19/180*pi, -12.57/180*pi, 89.99/180*pi, -17.56/180*pi} Waypoint_3_q = {30.22/180*pi, -14.97/180*pi, 61.42/180*pi, -13.62/180*pi, 89.99/180*pi, 29.33/180*pi} -- 设置运动速度⽐率 setSpeedFraction(0.8) -- 以关节运动的⽅式依次经过3个路点:Waypoint_1、Waypoint_2和Waypoint_3 moveJoint(Waypoint_1_q, 1, 1, 0, 0) -- 将信息打印到aubo_control⽇志中 textmsg("joint move to waypoint_1") moveJoint(Waypoint_2_q, 1, 1, 0, 0) textmsg("joint move to waypoint_2") moveJoint(Waypoint_3_q, 1, 1, 0, 0) textmsg("joint move to waypoint_3")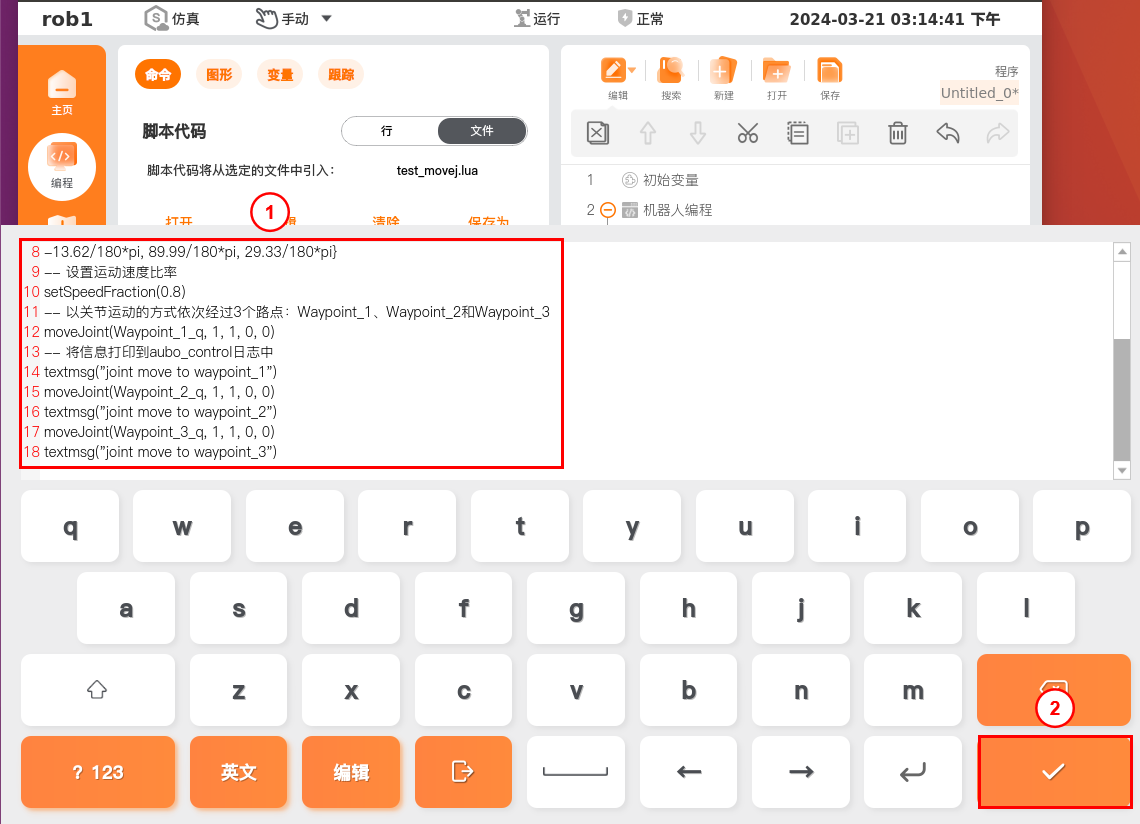
运行程序。