Skip to content
AUBO Developer
Search
K
Main Navigation
Manual
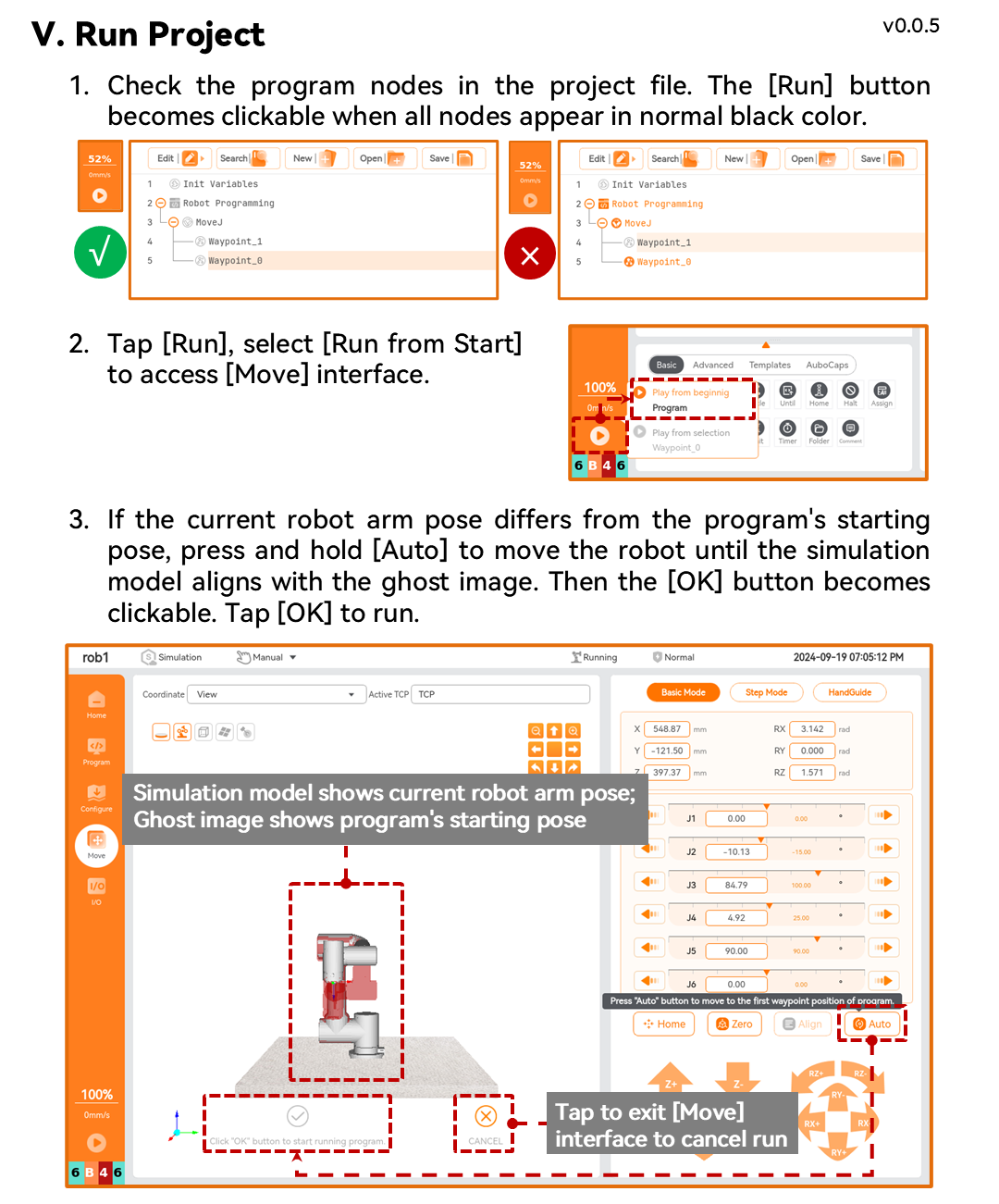
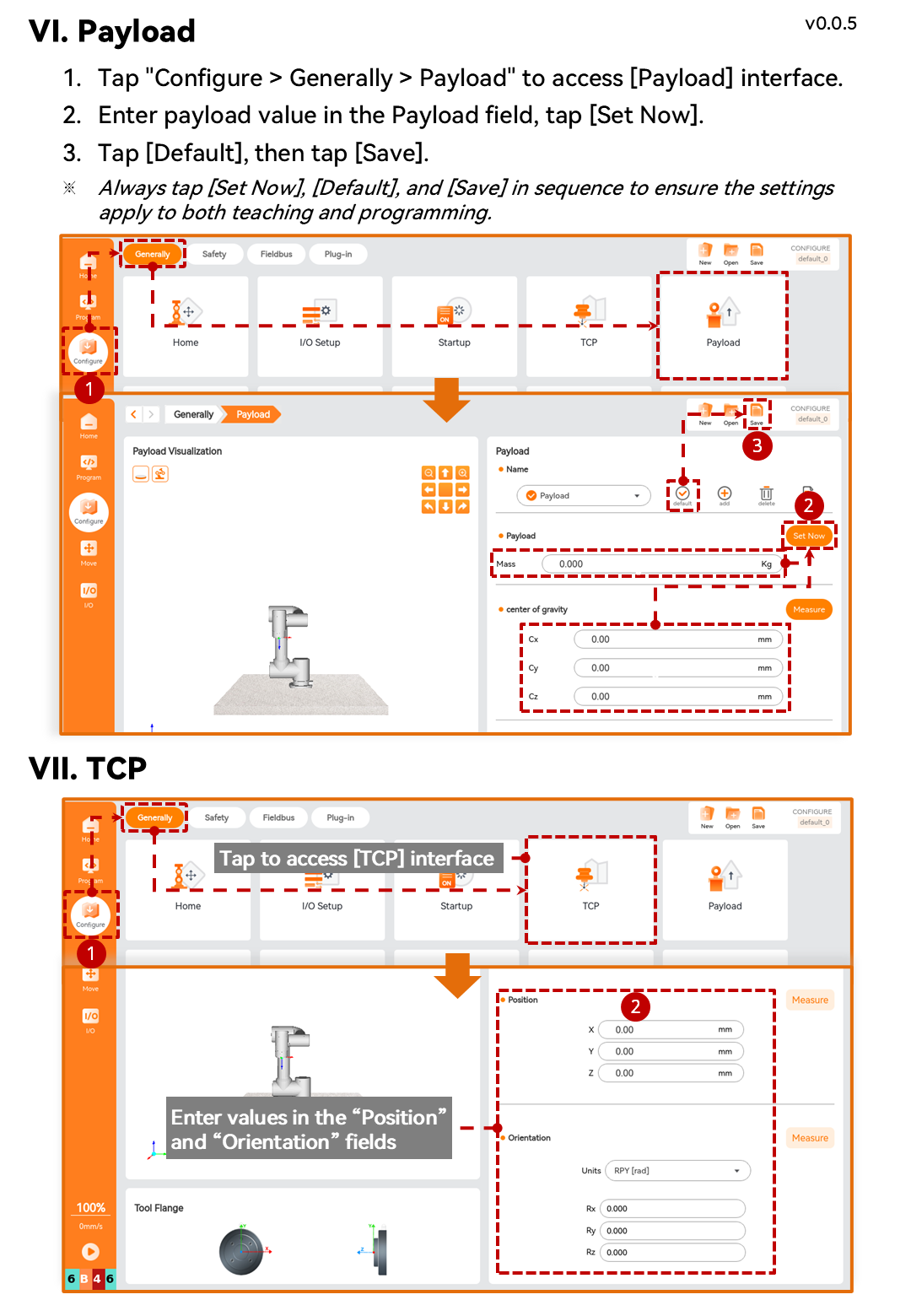
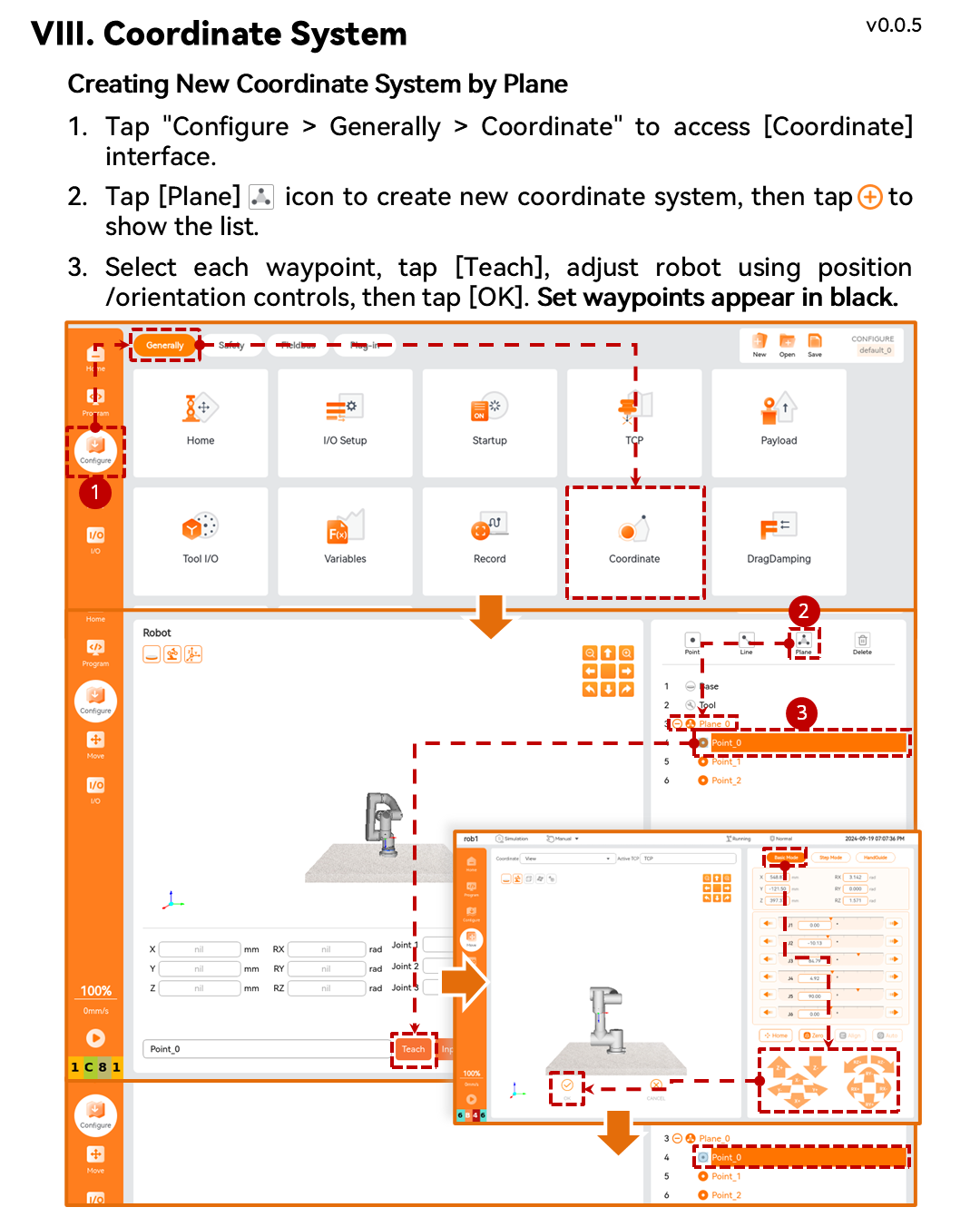
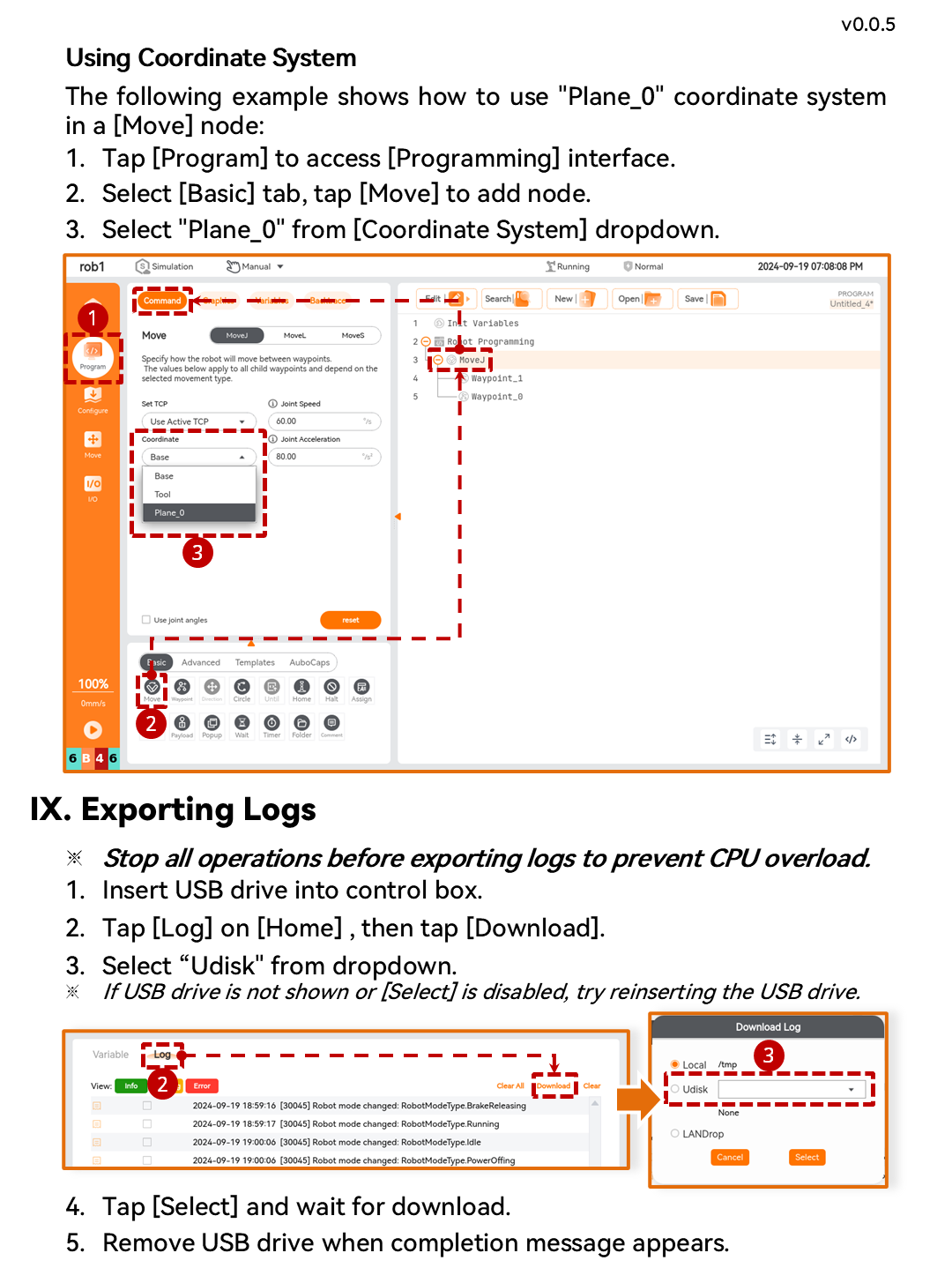
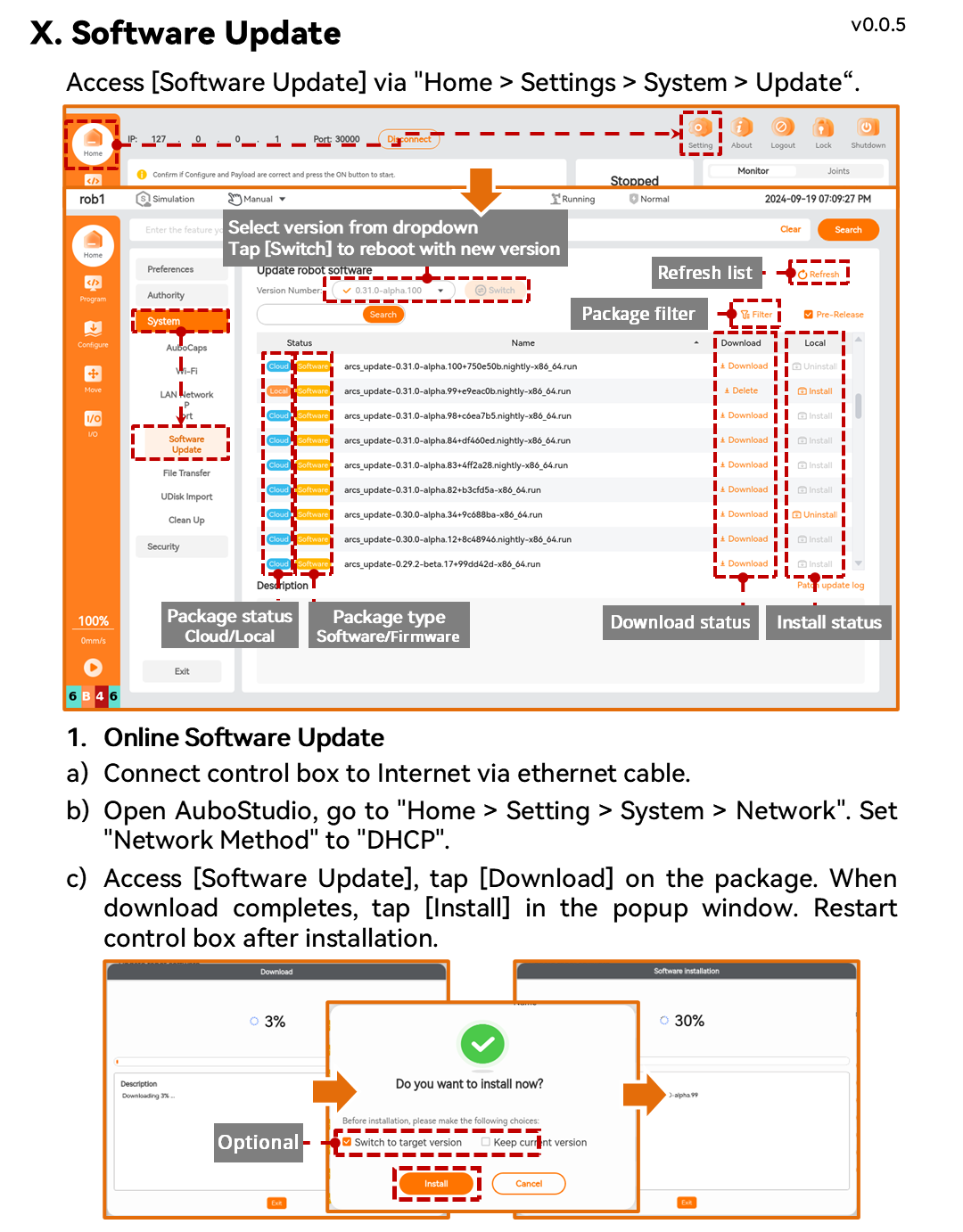
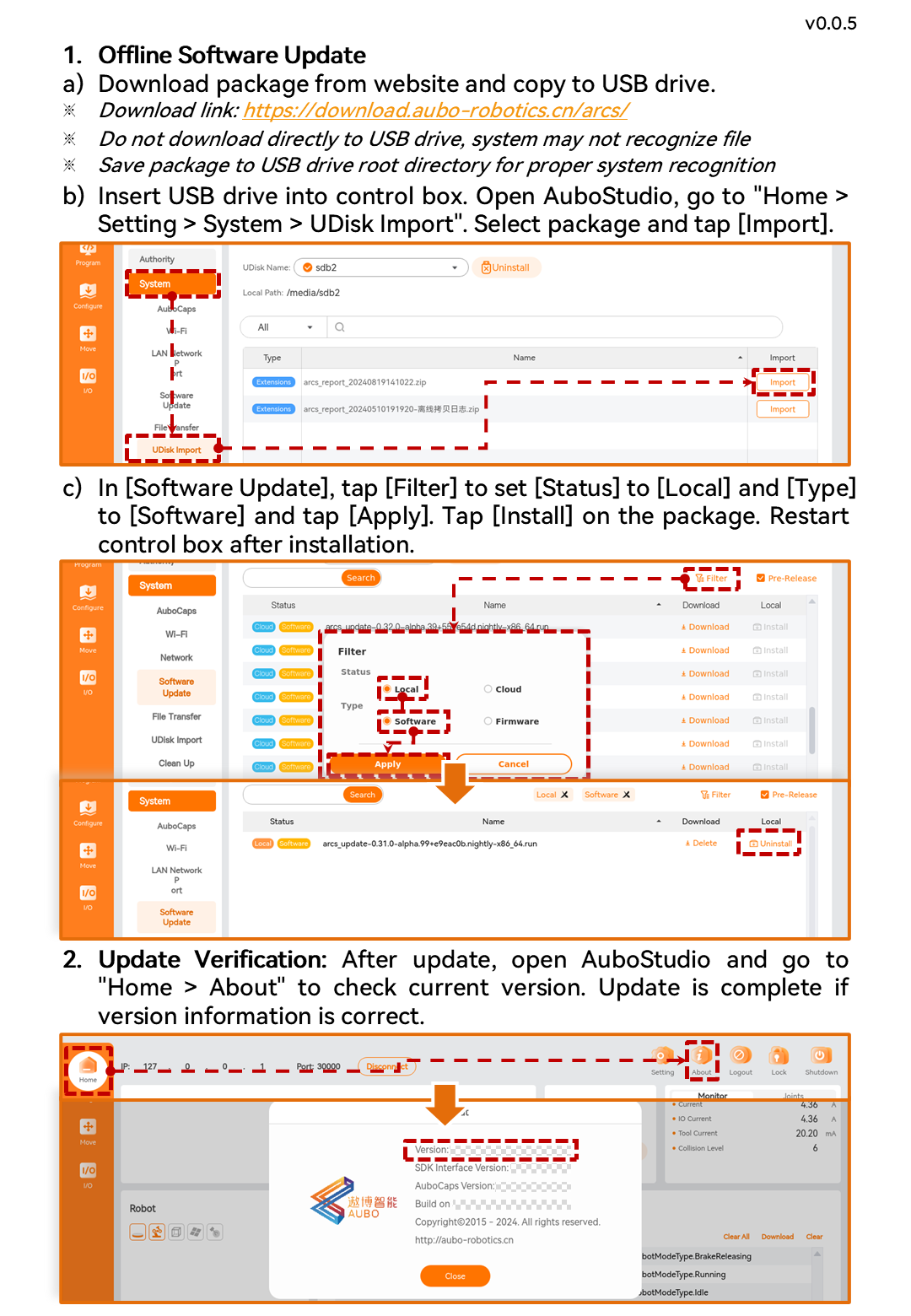
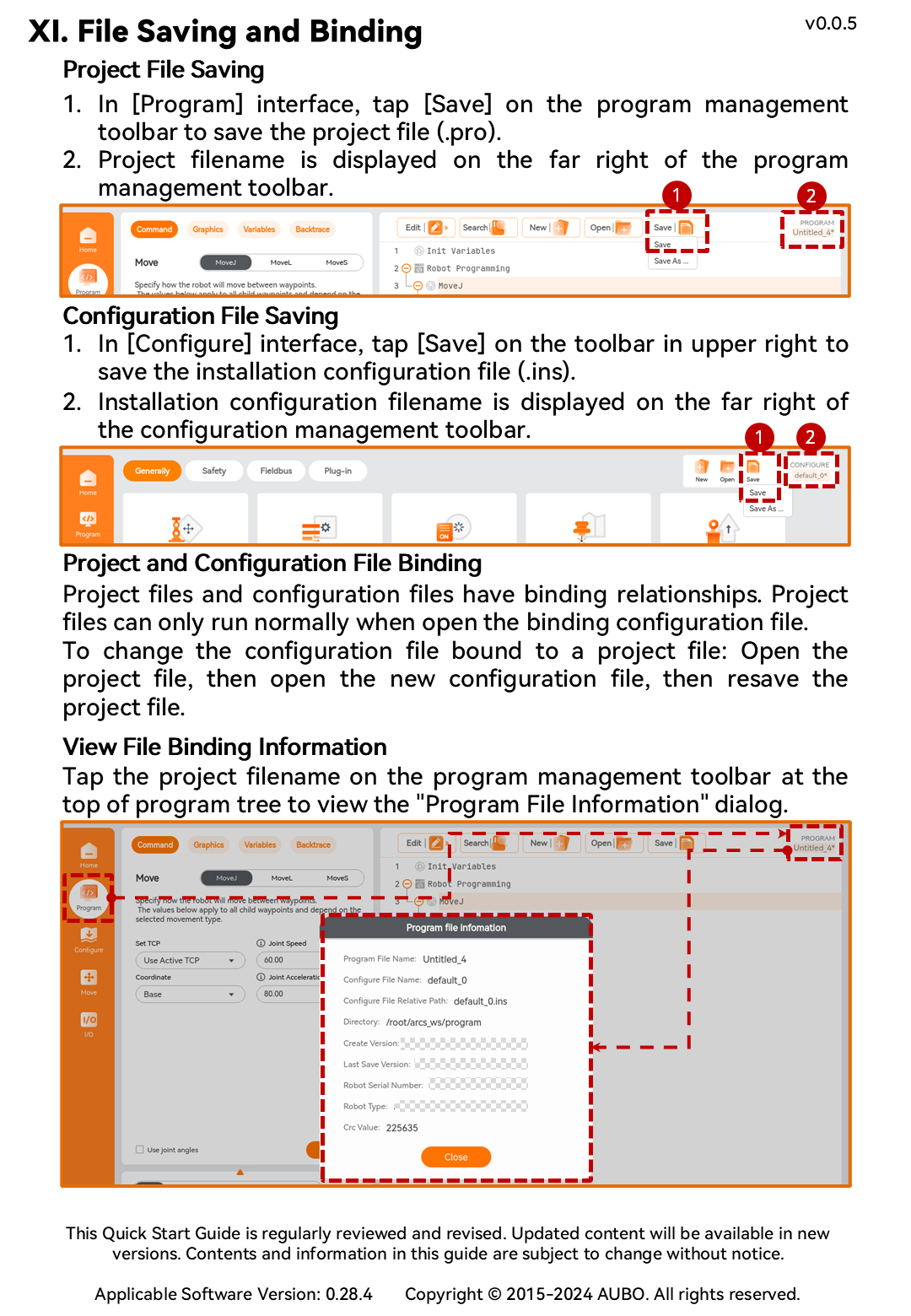
Quick Start
AuboStudio Quick Start
AuboStudio APP Quick Start
User Manual
AuboStudio User Manual
Hardware Manual
Compound Robot Product Manual
Application Manual
AUBO Welding Manual
Industrial_Bus_Manual
Vision Manual
Force Control Manual
Develop
LUA Guide
AuboStudio Plugins Dev
AUBO SDK
Manual
API References
Application Notes
Support
Download
Contact Us
English
简体中文
English
简体中文
Appearance
Return to top
On this page
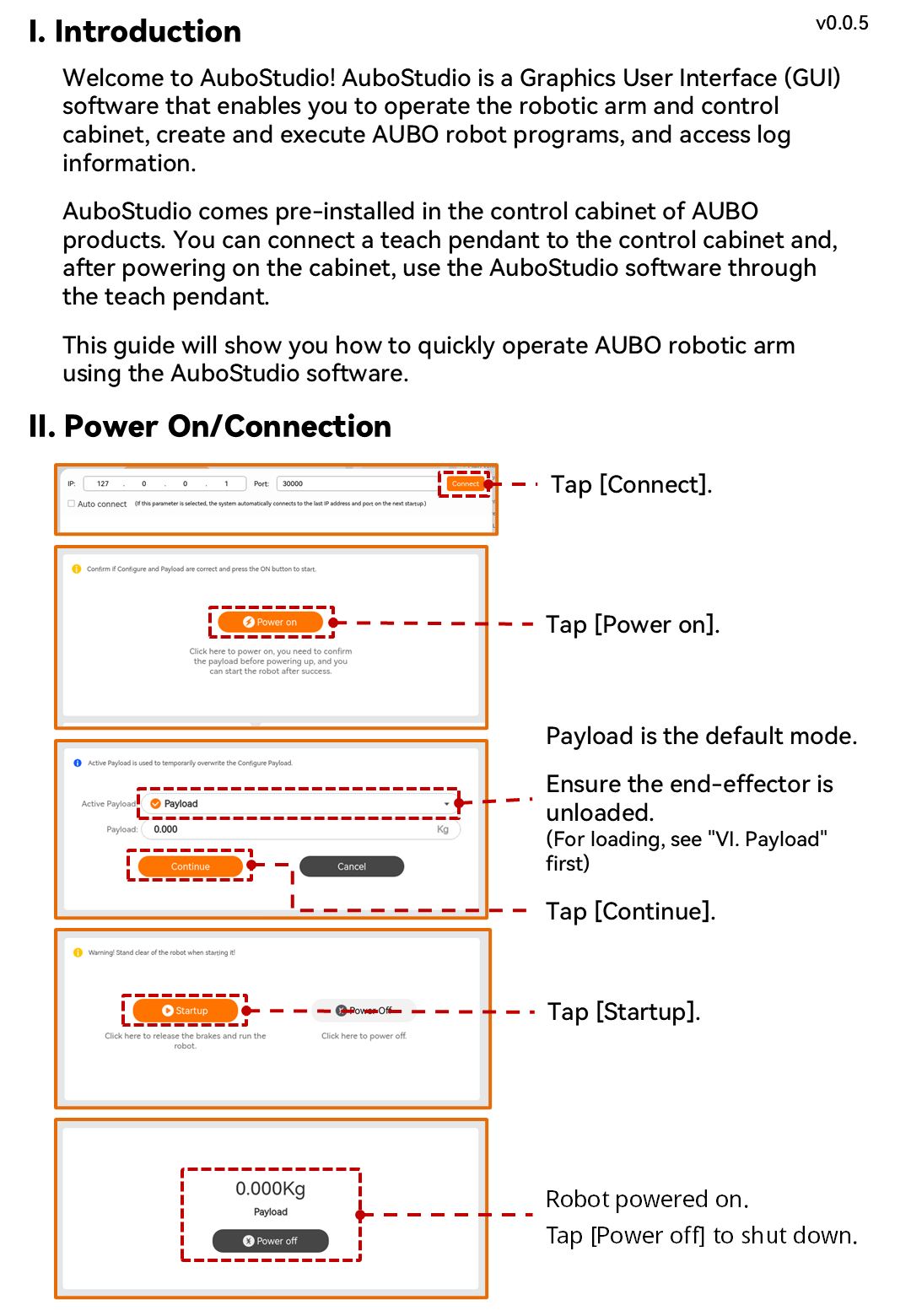
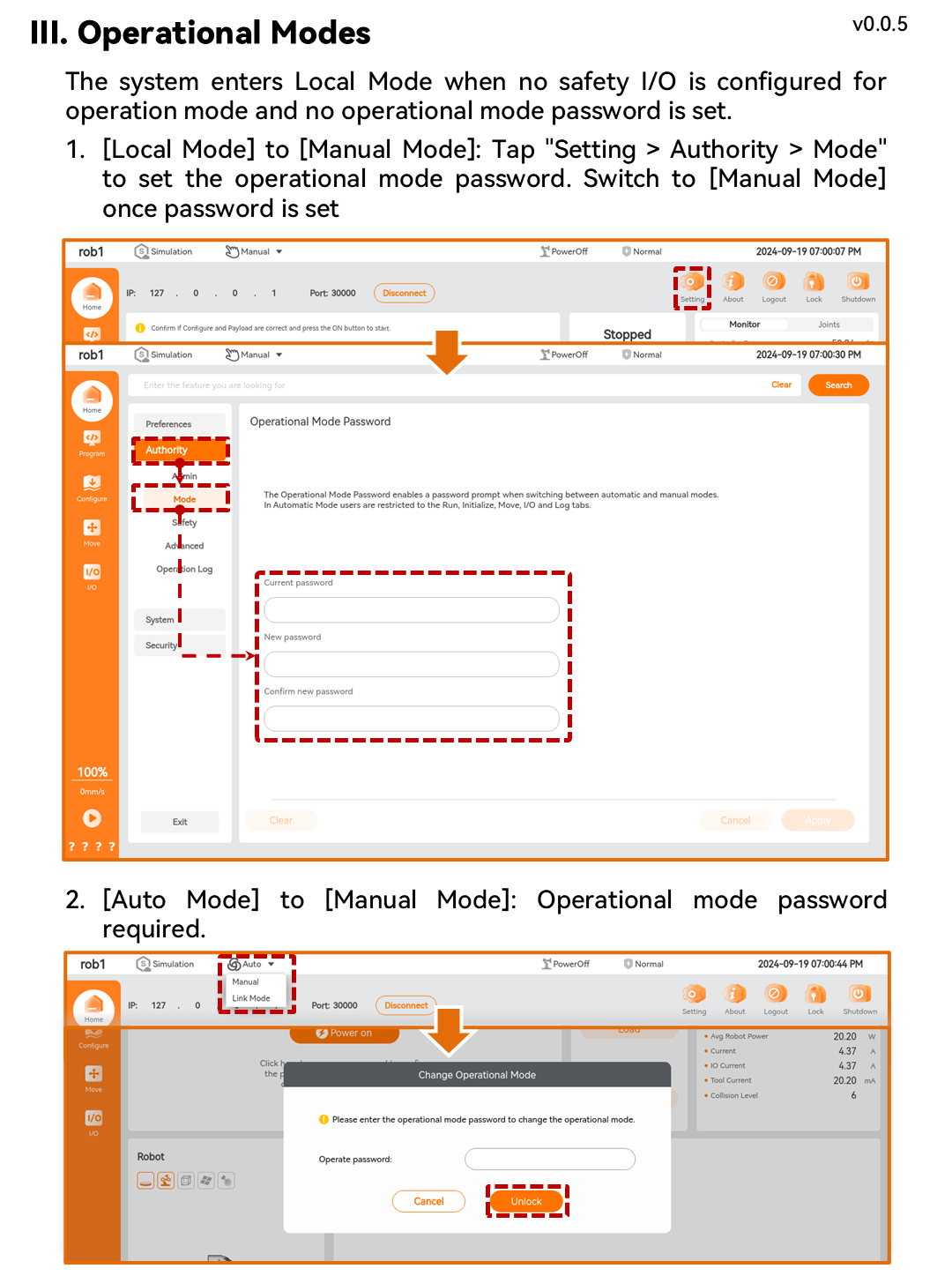
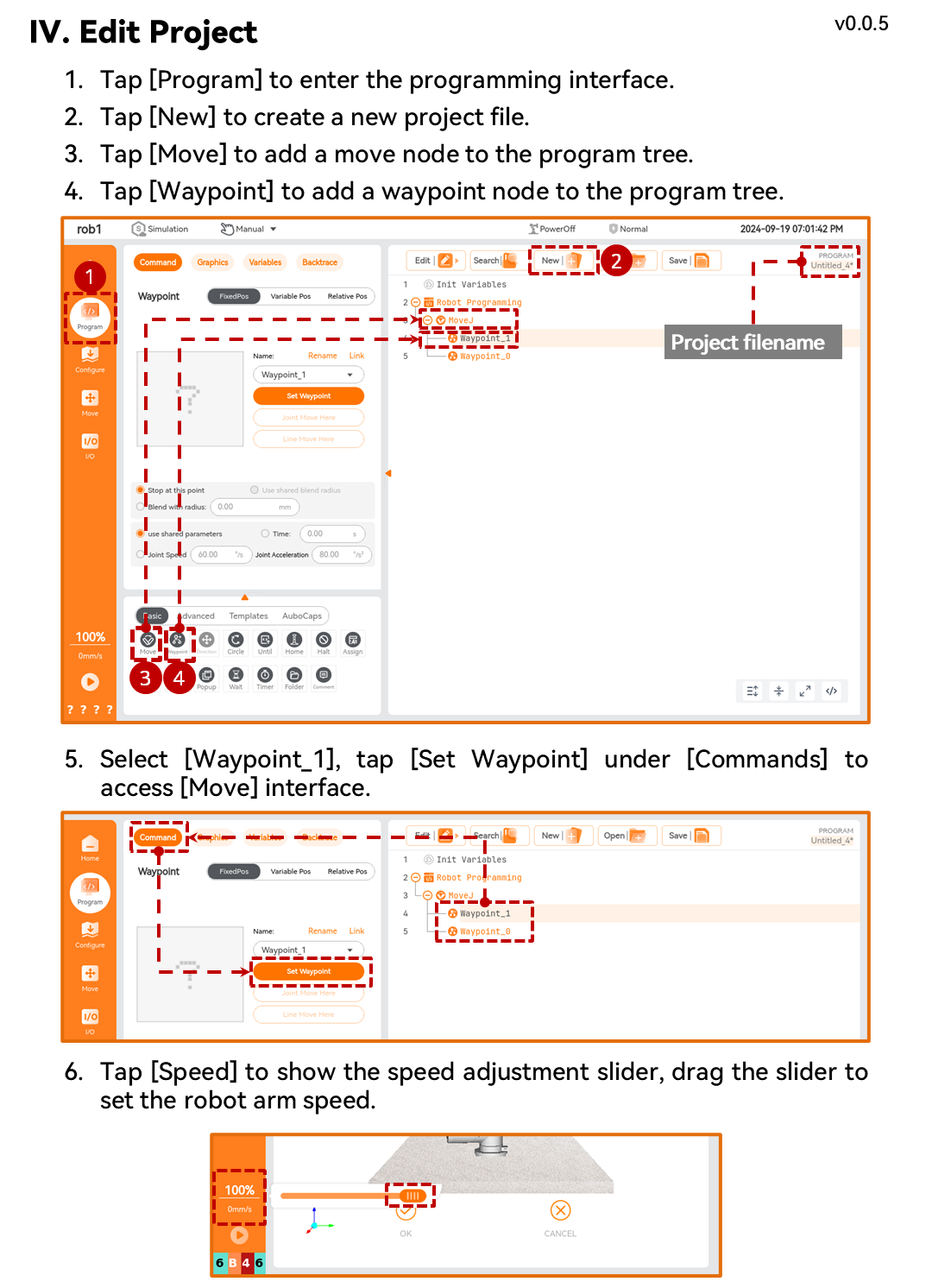
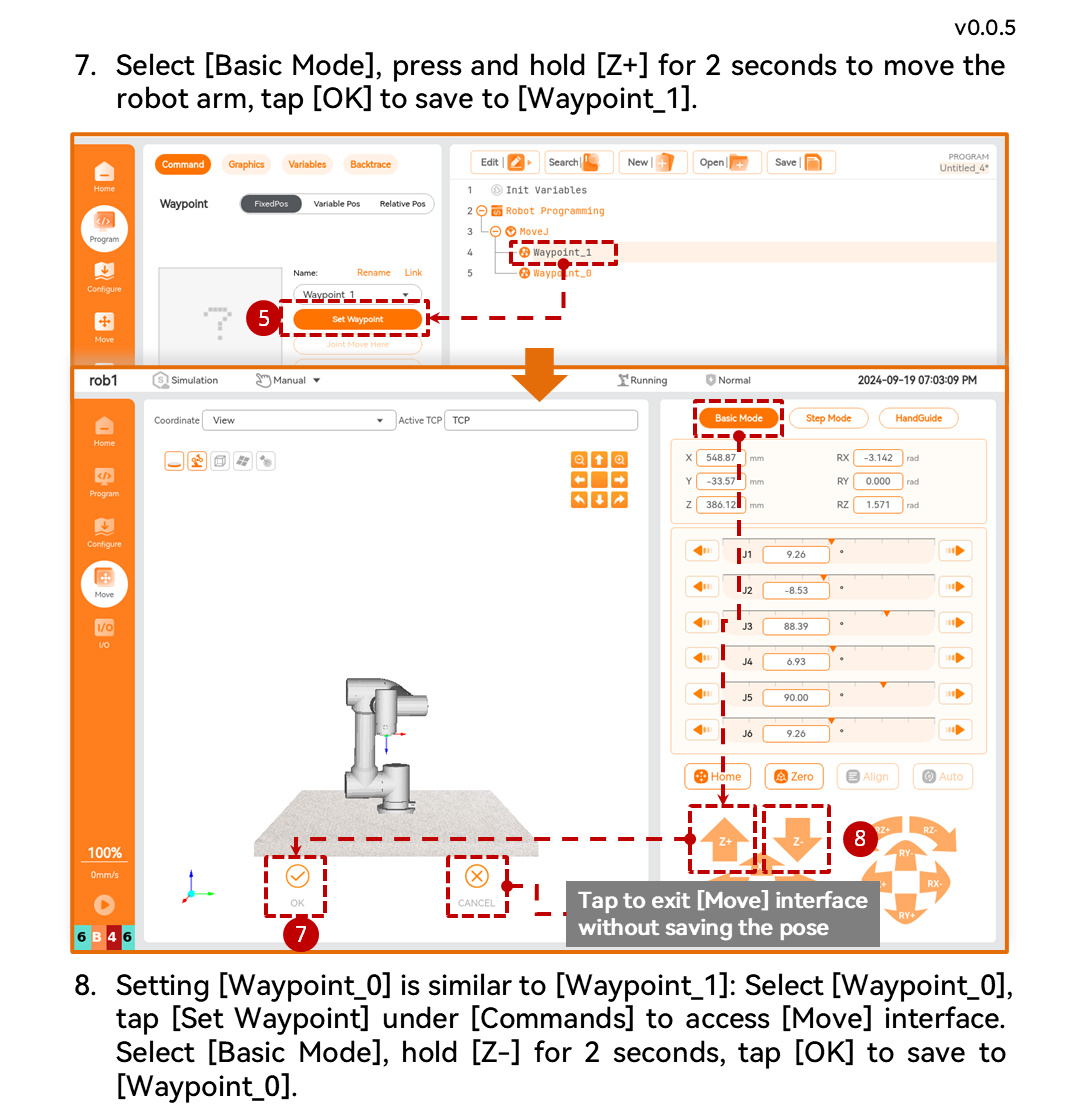
AuboStudio Quick Start