Examples of Running Python SDK
In Linux Environment
The following describes how to compile and run the example_startup.py example in the SDK using the PyCharm. After successful running, the teach pendant will be powered on and then powered off.
**Note: If the client of the SDK is connected to a real robot arm, the IP address in the code must be set to the robot arm's IP address. If the project is run on the Aubo Sim virtual machine and the client of the SDK is connected to the virtual machine, the IP address should be 127.0.0.1. **
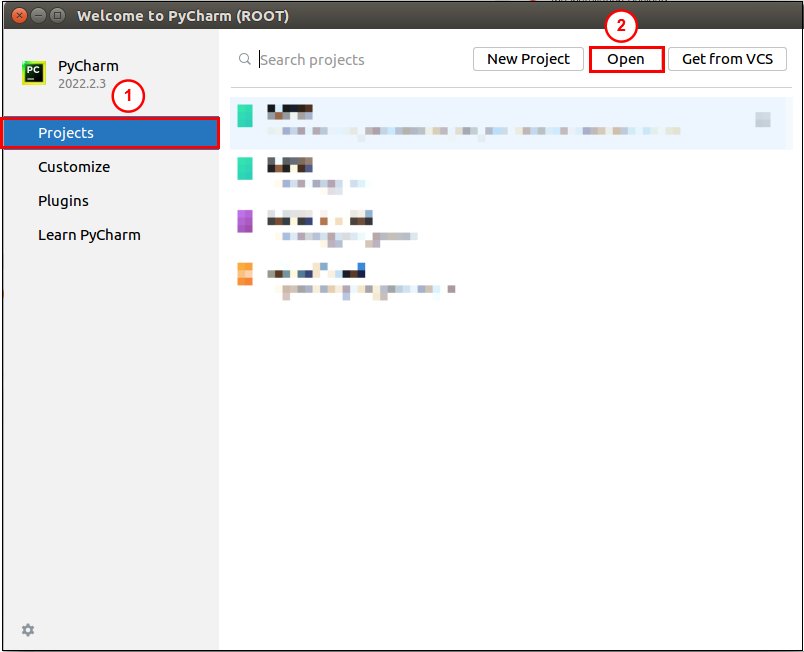
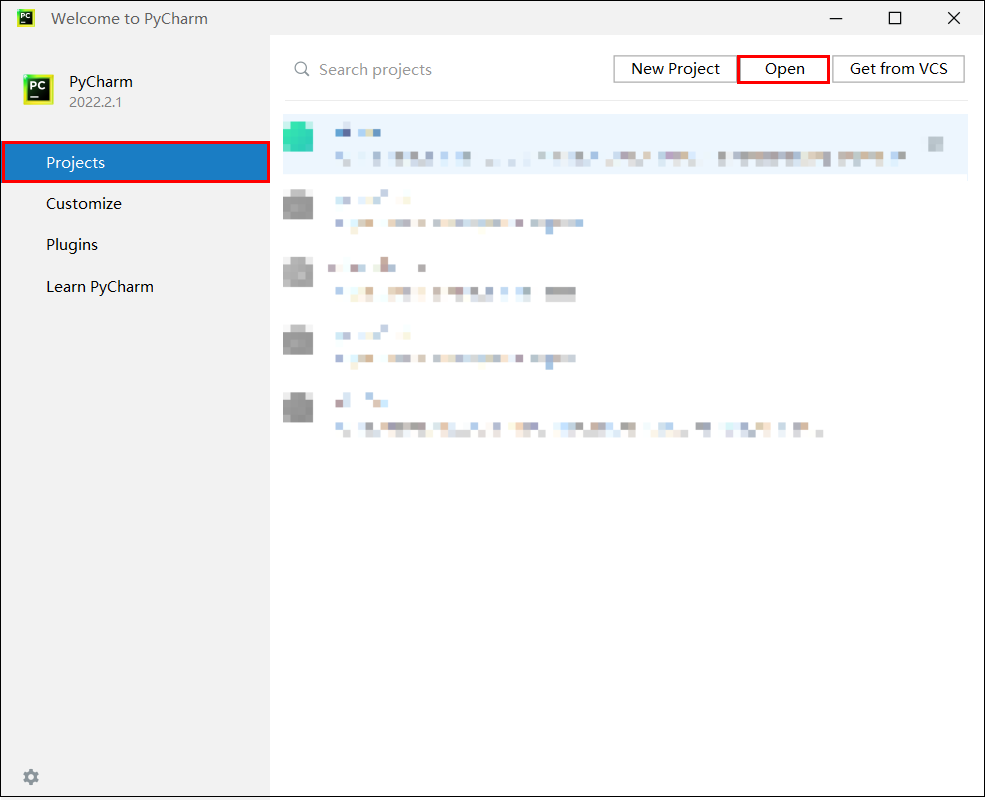
Open the PyCharm.
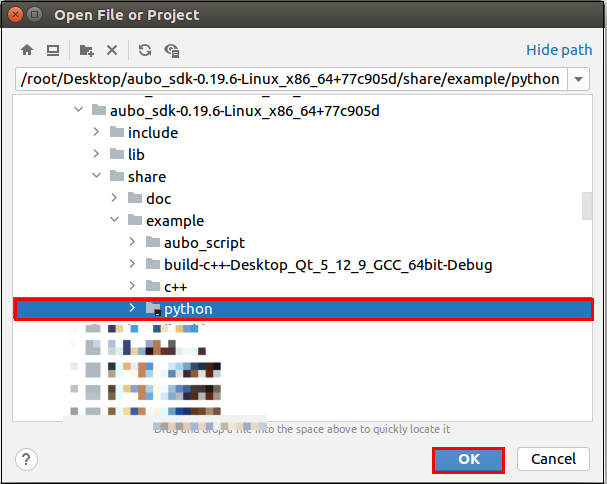
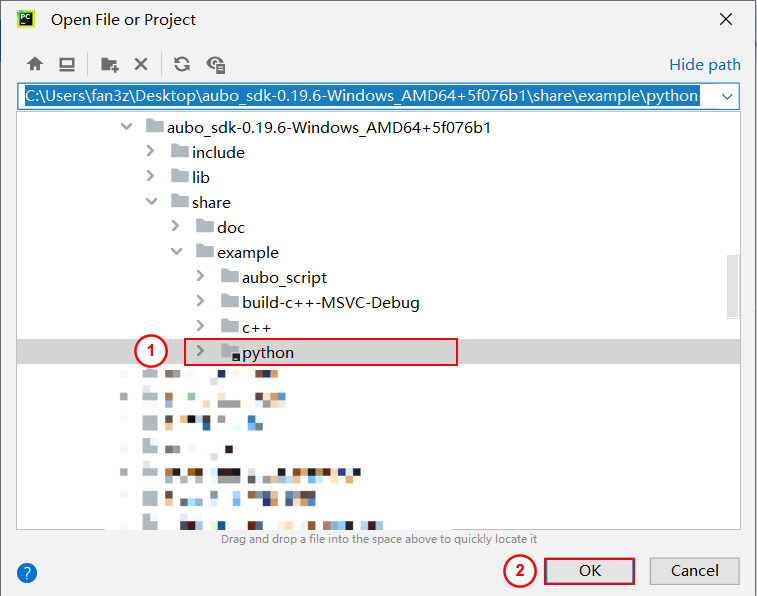
Locate the directory where the Python examples are stored, select the python, and click "OK".
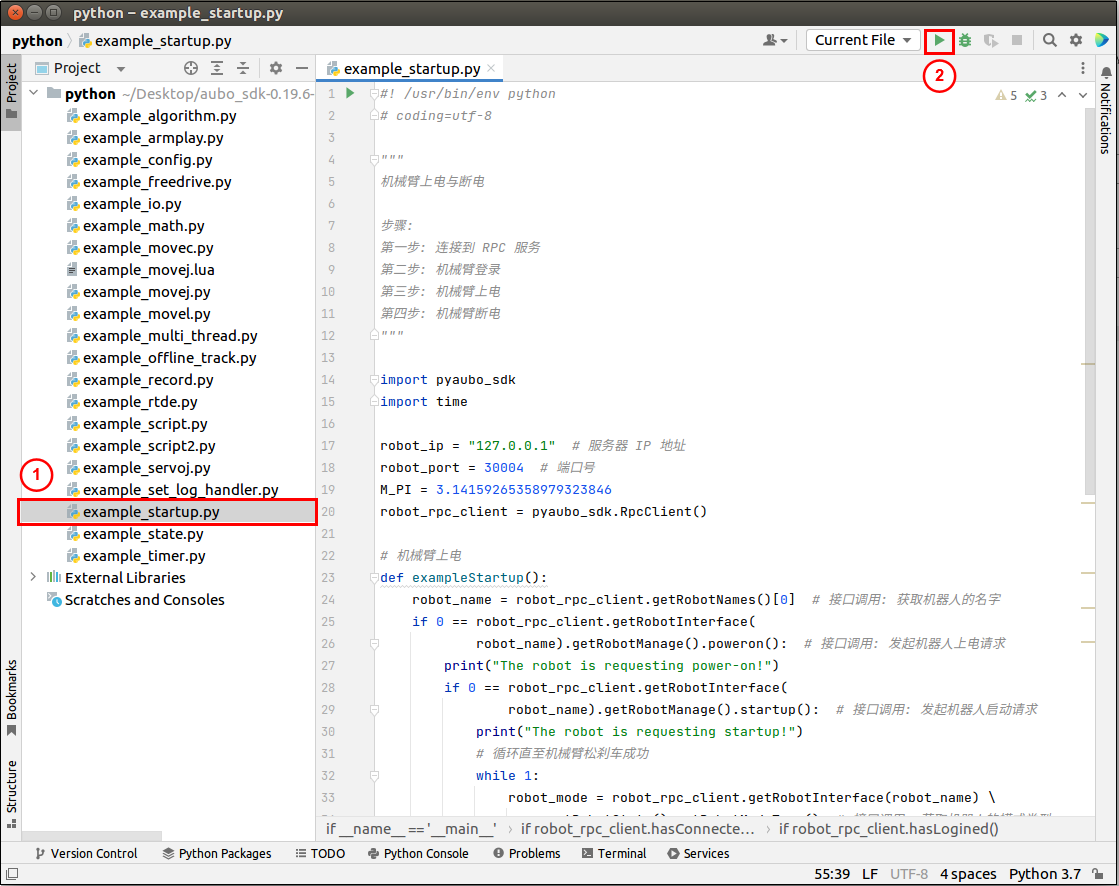
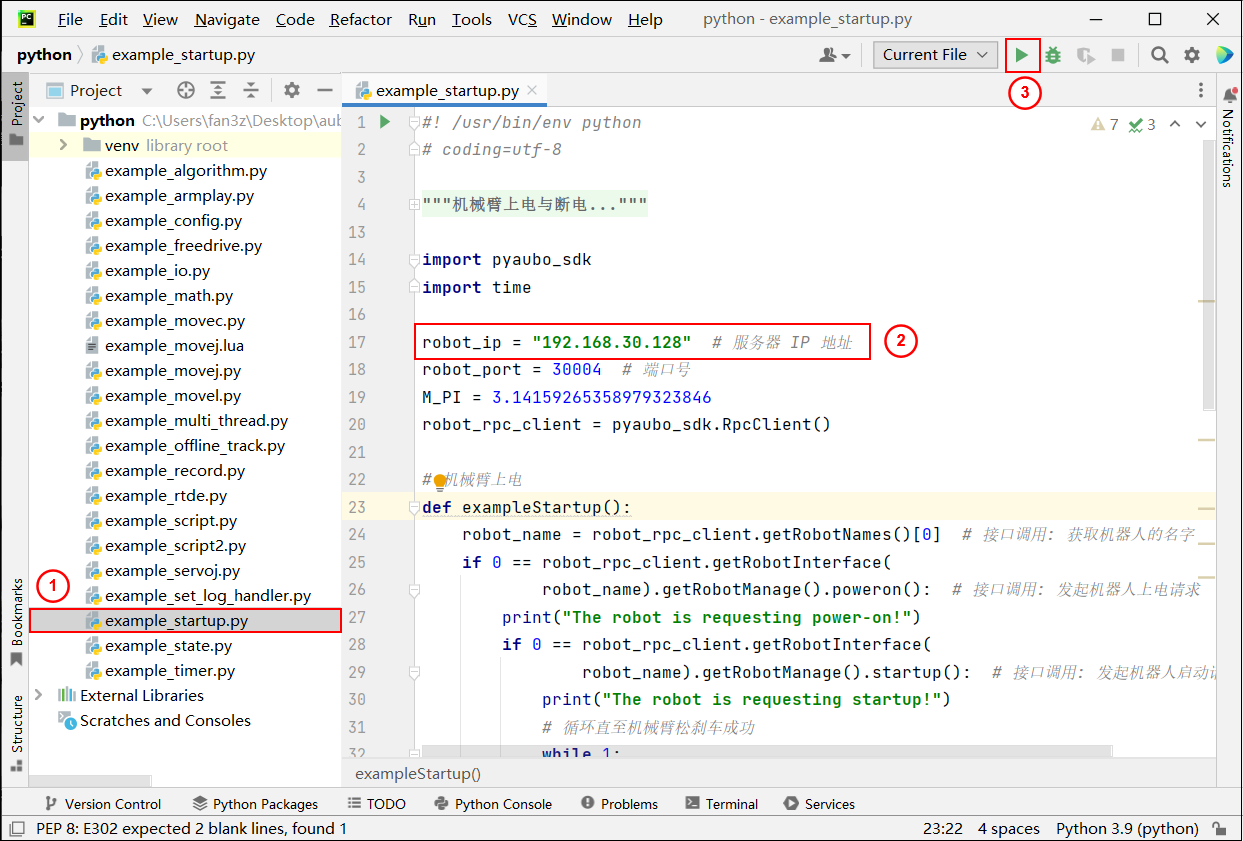
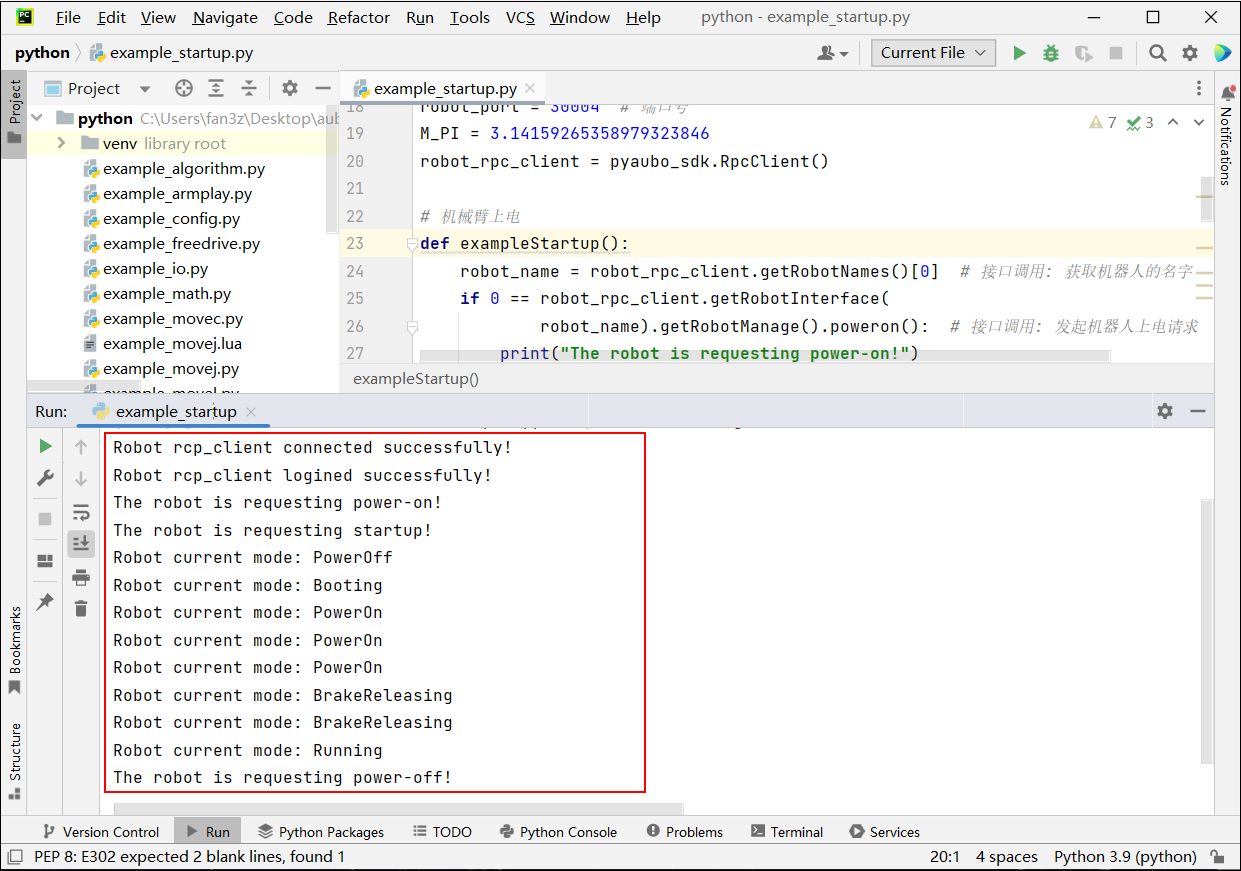
Select the example_startup.py fIle, and click the "Run" button.
Check the running results of the program.
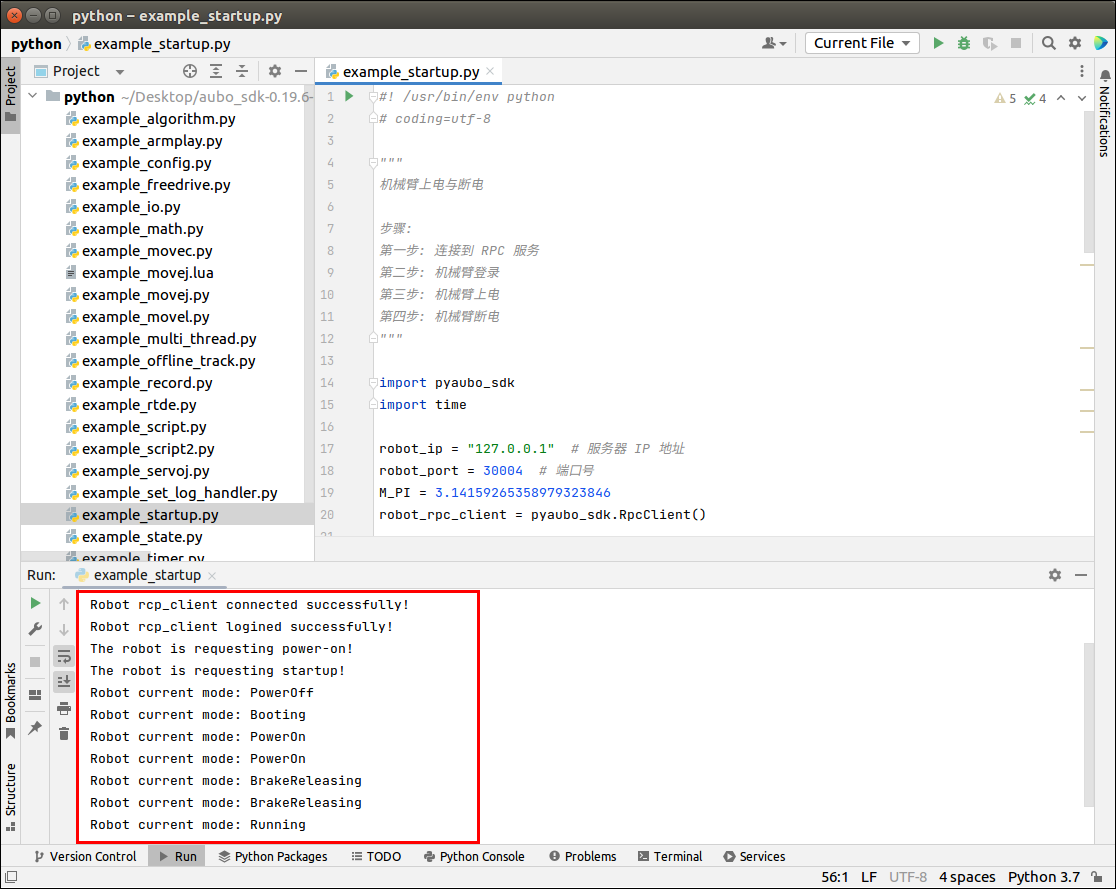
The robot arm is powered on first, and all the indicator lights on the teach pendant come on. Then the robot arm is powered off, and all the indicator lights go out.
In Windows Environment
The following describes how to compile and run the example_startup.py example in the SDK using the PyCharm. After successful running, the teach pendant will be powered on and then powered off.
**Note: To ensure successful communication between the client of the SDK and the robot arm, the IP address in the code must be changed to the IP address of the Aubo Sim virtual machine or the real robot arm before compilation and running. **
Open the PyCharm.
Locate the directory where the Python examples are stored, select the python, and click "OK".
Select the example_startup.py fIle, and click the "Run" button.
Check the running results of the program.
The robot arm is powered on first, and all the indicator lights on the teach pendant come on. Then the robot arm is powered off, and all the indicator lights go out.