遨博丰禾系列 Farm200 农业采摘机器人电气接口说明手册
1 产品介绍
1.1 简介
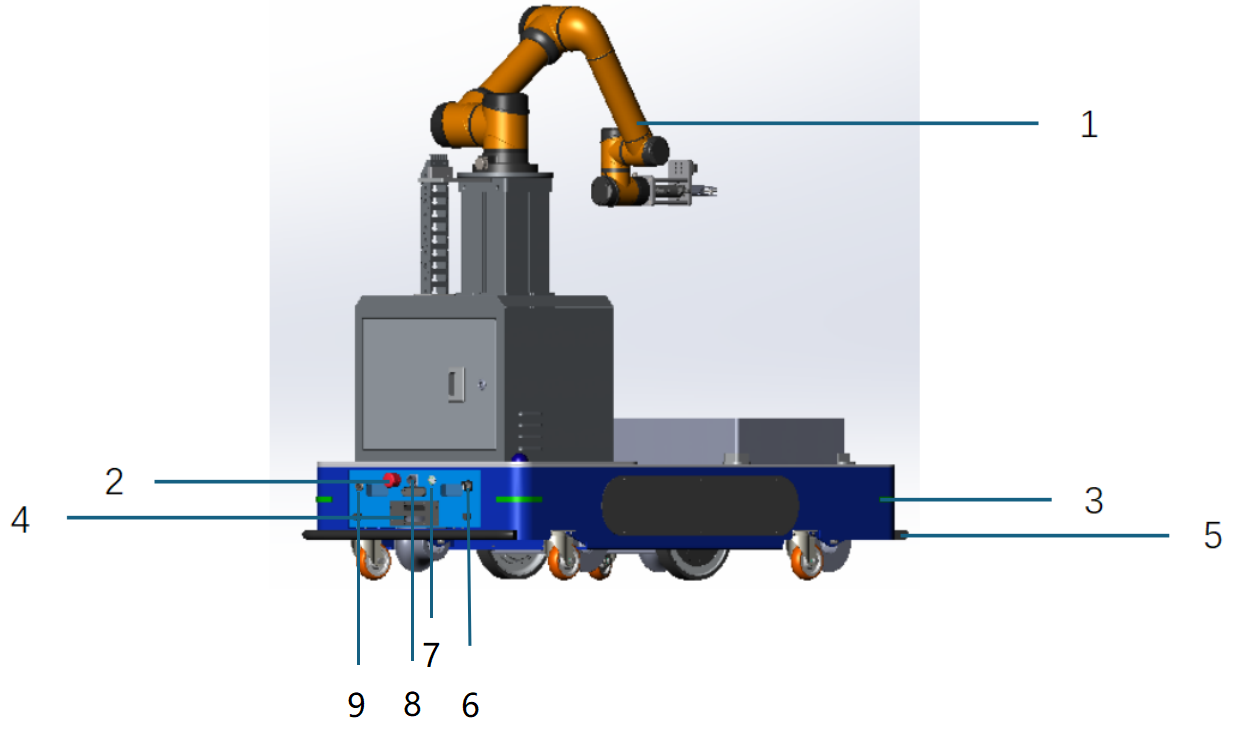
| 序号 | 按键及部件 | 描述 |
|---|---|---|
| 1 | 遨博协作机器人 | 遨博六轴协作机械臂 |
| 2 | 急停按钮 | 按下后可实现机器人的紧急停止,如需恢复至正常模式,需按照按钮上显示的方向旋转此按钮 |
| 3 | 氛围灯 | 用于显示机器人当前状态及电池电量 |
| 4 | 自动充电口 | 用于与自动充电器连接的接口 |
| 5 | 防撞触边 | 用于AGV碰撞防护 |
| 6 | 解闸开关 | 顺时针旋转解闸开关后,可手动推动AGV |
| 7 | 开/关机按钮 | 长按此按钮可开启或关闭AGV |
| 8 | 手动充电口 | 用于与手动充电器连接的接口 |
| 9 | 仓门钥匙口 | 用于打开AGV仓门 |
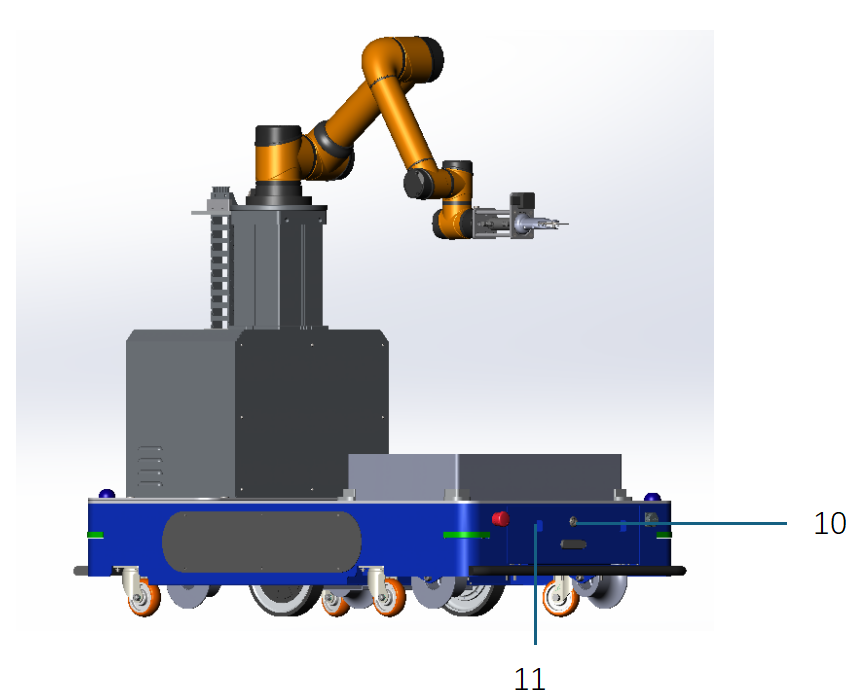
| 10 | 电池仓钥匙口 | 用于释放或锁住电池仓锁扣 |
| 11 | 电池仓拉手 | 用于电池的更换 |
1.2 开/关机按钮灯状态显示说明
| 指示灯状态 | 机器人状态 | 备注 |
|---|---|---|
| 绿色常亮 | 开机后,待机,电机未上电 | 长按开机按钮3S后,绿灯开启 |
| 绿色闪烁 | 开机后,待机,电机未上电,解闸旋钮ON状态 | |
| 蓝色常亮 | 开机后,电机已上电 | |
| 蓝色闪烁 | 开机后,电机已上电,解闸旋钮ON状态 | |
| 红色常亮 | 仅急停按钮被拍下 | |
| 红色闪烁 | 解闸模式已开启 | 解闸旋钮ON状态,且至少一个急停按钮被拍下 |
1.3 氛围灯状态显示说明
| 灯状态 | 设备状态 | 备注 |
|---|---|---|
| 彩虹色渐变 | 开机中/电池通讯未建立 | |
| 绿色常亮 | 开机后,待机,电机未上电 | |
| 绿色闪烁 | 开机后,待机,电机未上电,解闸旋钮ON状态 | |
| 蓝色常亮 | 电机上电 | |
| 蓝色闪烁 | 开机后,电机上电,解闸旋钮ON状态,但未拍急停 | |
| 蓝色呼吸灯 | 执行任务中 | |
| 红色常亮 | 仅急停按钮被拍下 | |
| 红色闪烁 | 解闸模式开启 | 指示灯红色闪烁 |
| 粉红色闪烁 | 解闸旋钮OFF状态,急停按钮被拍下; | 指示灯红色常亮 |
| 黄色常亮 | 电量低于50%,高于30% | |
| 红色呼吸灯 | 电量低于30% | |
| 橙黄色呼吸灯 | 充电中 | |
| 红色呼吸灯 | 电机错误故障 | |
| 粉红色呼吸灯 | 设备停障中 |
1.4 电气接口
前面板:
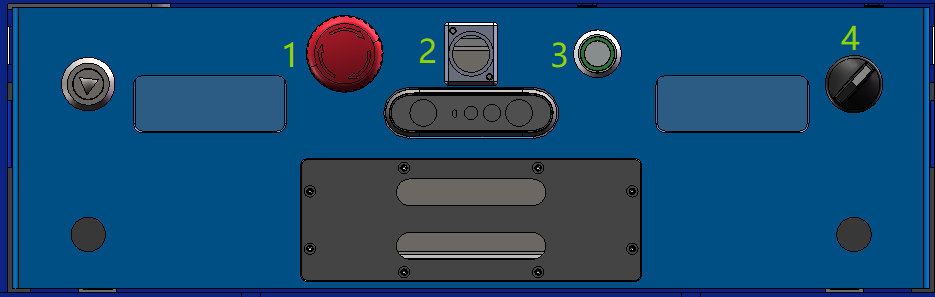
后面板:
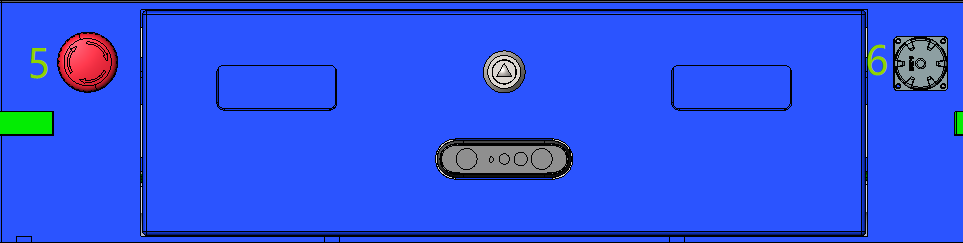
| 序号 | 按键及部件 | 描述 |
|---|---|---|
| 1 | 急停按钮-1 | 设备需要紧急停止/解闸时使用 |
| 2 | 调试网口 | 由AGV内部路由器WAN口引出,通讯速率:100 Mb/ms |
| 3 | 开/关机带灯按钮 | 设备开机或关机使用,LED灯显示红绿蓝三色表示不同状态,详见按钮灯状态说明 |
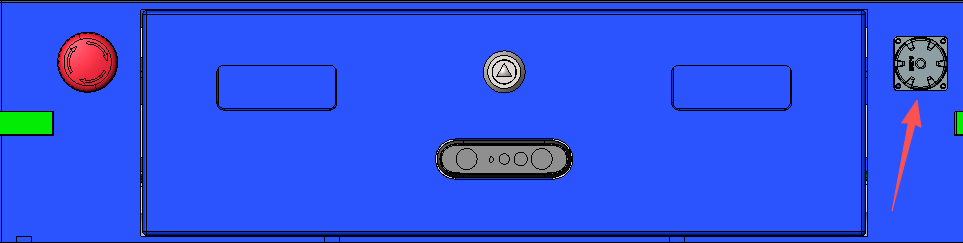
| 4 | 解闸旋钮 | 外部解闸旋钮,设备需要解闸时配合急停按钮使用 |
| 5 | 急停按钮-2 | 设备需要紧急停止/解闸时使用 |
| 6 | 手动充电口 | 手动充电时使用,与充电器输出插头进行插接 |
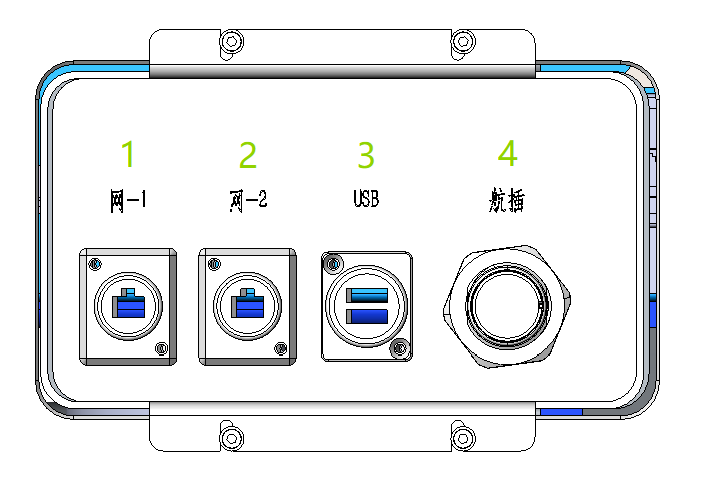
转接盒:
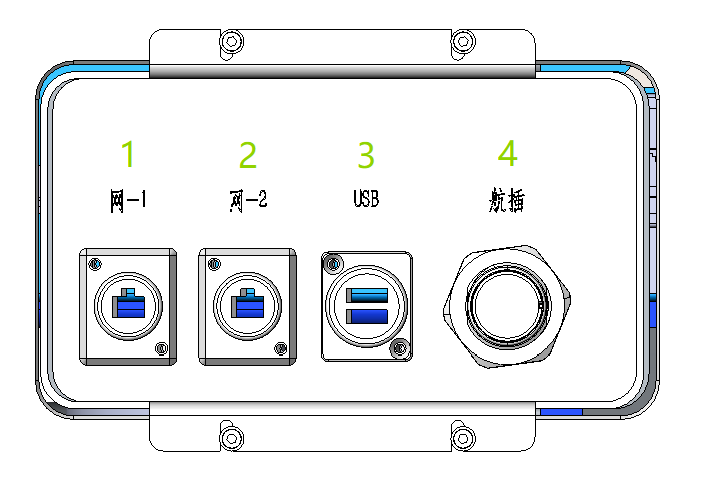
| 序号 | 按键及部件 | 描述 |
|---|---|---|
| 1 | 转接盒网口-1 | 由AGV内部工控机LAN3口引出,通讯速率:1000 Mb/ms |
| 2 | 转接盒网口-2 | 由AGV内部路由器LAN4口引出,通讯速率:100 Mb/ms |
| 3 | 转接盒双路USB口 | 由AGV内部工控机USB3.0口引出 |
| 4 | 转接盒航插口 | 给客户自配设备或二层设备提供DC 48V电源(最大功率1000W)、安全接口板输出、工控机COMH1 RS485信号 |
2. 农业机器人开机与关机
2.1 开机
设备开机步骤:
- 锂电池开关处于开启状态;
- 长按开/关机带灯按钮,至指示灯变绿后松开(注意指示灯变绿后快速松开,否则设备将进入关机程序进行关机),设备进入开机程序,待指示灯变蓝,设备完成开机,且电机完成上电;
2.2 关机
设备关机步骤:
- 设备处于开机或待机状态;
- 长按开/关机带灯按钮,待指示灯呈绿灯闪烁状态后松开,设备进入关机程序进行关机;
- 当按钮指示灯熄灭,则设备关机完成;
- 若关机后长时间不使用设备,还需将电池侧面金属按钮开关关闭(弹开状态),否则容易造成锂电池过放。若关机时锂电池电量已经较低,建议先将锂电池充满电后再关闭侧面金属按钮,并要求每隔28天对电池组充放循环一次。
2.3 急停
农业机器人移动底盘的前后舱门都安装有红色急停按钮,当需要设备紧急停止时,拍下该两个急停按钮中任意一个即可使复合机器人紧急停止。
当设备故障解除后,顺时针旋转急停按钮使其弹回正常位置,即可完成复位,解除设备急停状态。
2.4 解闸
农业底盘AGV的解闸包括关机状态解闸和开机状态解闸。
解闸后,左右两侧行走电机抱闸松开,可以单人推动AGV。
关机状态解闸:关机状态下的解闸,需满足以下三个条件:
- 锂电池开关为ON状态;
- 向右旋动解闸旋钮;
- 拍下至少一个急停按钮;
开机状态解闸:开机状态下的解闸,需满足以下三个条件:
- AGV处于开机状态;
- 向右旋动解闸旋钮;
- 拍下至少一个急停按钮;
可以看出,要对底盘AGV进行解闸,必须拍下至少一个急停按钮,同时向右旋动解闸旋钮。
3. 机器人充电
农业机器人锂电池充电需使用适配的充电器进行手动充电。
充电器型号:KP900F-60L-1h
充电器技术参数参考下表:
| 序号 | 产品 | 备注 |
|---|---|---|
| 1 | 最大输出电压 | 54.6V±0.2V |
| 2 | 输出电流 | 15A±5% |
| 3 | 最大输出功率 | 900W |
| 4 | 输入电压 | 180~260Vac |
| 5 | 额定输入电压 | 220Vac |
| 6 | 额定输出 | 15A |
| 7 | 输入频率 | 50~60Hz |
| 8 | 转换电流 | 0.75A |
环境条件要求:
| 序号 | 参数类型 | 技术参数 |
|---|---|---|
| 1 | 工作温度 | -20~45℃。 |
| 2 | 相对湿度 | 5%~95% |
| 3 | 存贮温度 | -40~70℃。 |
| 4 | 冷却方式 | 强制风冷 |
| 5 | 海拔高度 | 0~3000m |
充电器实物如下图:

手动充电
农业机器人移动底盘AGV由设备操作人员使用充电器进行手动充电。
手动充电口位置如图所示:
充电时,需确保插头与插座之间插接到位、紧密,严禁形成虚接,造成打火、烧熔插口甚至设备等严重后果。

在进行手动充电时,应确保充电器插头与充电口插座插接到位,杜绝形成虚接而发生危险,造成损失。
 | 1. 请使用原装充电器。禁止混用其他品牌充电器,否则会给电池造成不可逆损伤。 2. 电池具备火灾、爆炸等风险,勿将电池分解、压碎、焚化、加热或投入火中。 3. 勿将电池投入水中或将其弄湿。 4. 勿将电池正负极与金属壳体同时接触。 5. 勿将电池短路、过充或过放。 6. 勿在热源(如火或加热器)附近使用或储存电池。 7. 勿将电池正负极接反。 8. 勿用钉子或其它尖锐物体刺穿电池壳体,禁止锤击或脚踏电池。 9. 勿擅自以任何方式拆卸或修整电池。 10. 勿撞击、投掷或者使电池受到机械振动及自然跌落。 11. 勿将不同种类、不同品牌的电池混合使用。 12. 如果电池发出异味、发热、变形、变色或出现其他任何异常现象时不得使用,并将电池转移出使用环境。 13. 如果电池起火,需用干粉、泡沫灭火器、沙子等熄灭并将电池远离使用环境。 |
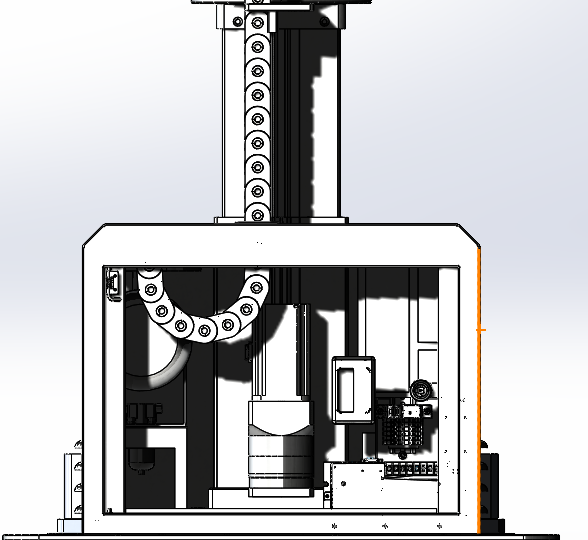
4. 二层机构
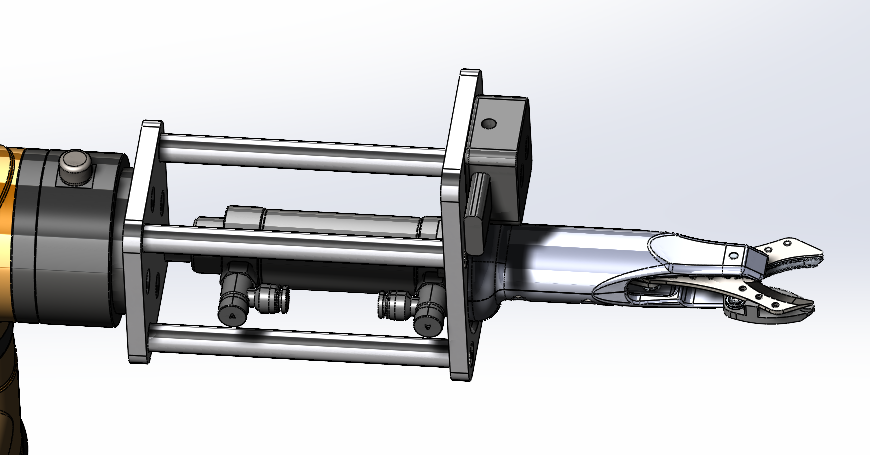
4.1 机构介绍
农业机器人的二层机构分为两段式升降柱及剪刀夹爪 两个部分,其中,剪刀夹爪又分为气动和电动两种。
农业机器人通过二层转接盒将底盘与二层机构进行电气连接:
二层转接盒各接口功能如下:
| 序号 | 按键及部件 | 描述 |
|---|---|---|
| 1 | 网口-1 | 由AGV内部工控机LAN3口引出,通讯速率:1000 Mb/ms,由网线与升降柱驱动器X1网口连接,进行EtherCAT通讯; |
| 2 | 网口-2 | 由AGV内部路由器LAN4口引出,通讯速率:100 Mb/ms,该网口作为调试口使用 |
| 3 | USB口 | 由AGV内部工控机USB3.0口引出,备用 |
| 4 | 航插口 | 由航插线束给二层设备提供DC 48V电源(最大功率1000W)、安全接口板输出、工控机COMH1 RS485接口 |
4.2 升降柱
升降柱技术参数参考下表:
| 序号 | 产品 | 备注 |
|---|---|---|
| 1 | 最大输出功率 | 750W |
| 2 | 输入电压 | DC 48V |
| 3 | 防护等级 | IP54 |
| 4 | 适应温度 | -35~65℃。 |
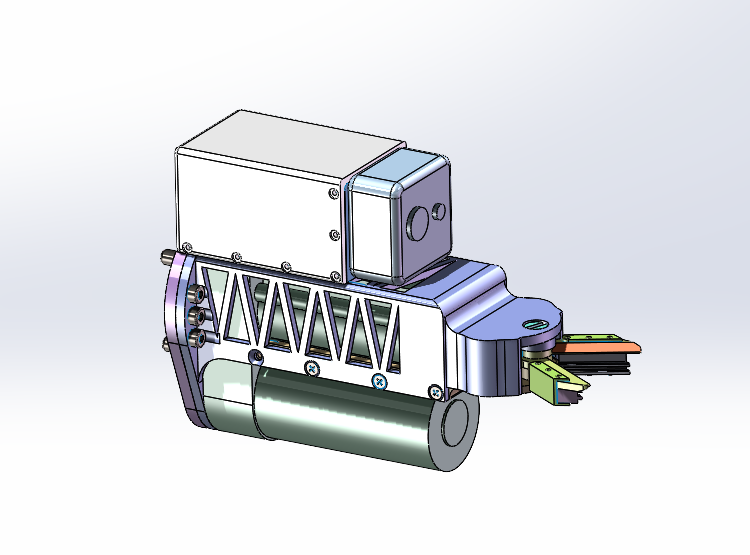
4.3 气动剪刀及夹爪
气动剪刀和夹爪由气泵提供气源:
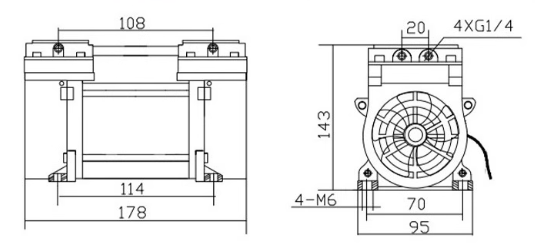
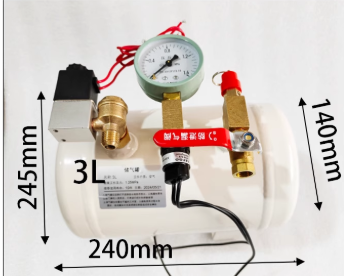
气泵技术参数如下:
| 序号 | 产品 | 备注 |
|---|---|---|
| 1 | 最大输出功率 | 240W |
| 2 | 输入电压 | DC 12~48V |
| 3 | 绝缘等级 | B |
| 4 | 额定压力 | 0.8MPa |
| 5 | 适应温度 | -35~50℃ |
| 6 | 耐电压强度 | 1500V/50Hz , 1分钟不击穿 |