AGVC Python SDK 运行示例
1 简介
本文档旨在为开发者提供 AGVC Python SDK 的使用说明,包括运行环境要求、下载与安装及使用案例,适用于所有使用该 SDK 进行 AGV 开发和集成的开发者。
2 运行环境要求
Python SDK
- 支持的操作系统:Linux 64 位、Windows 64 位
- 支持的硬件平台:x86 平台
- Python 版本要求:
- Linux x86:Python 3.6 ~ Python 3.12
- Windows x86:Python 3.6 ~ Python 3.12
3 安装与卸载
3.1 下载与安装方法
方法 1:在 PyPI 官网下载安装
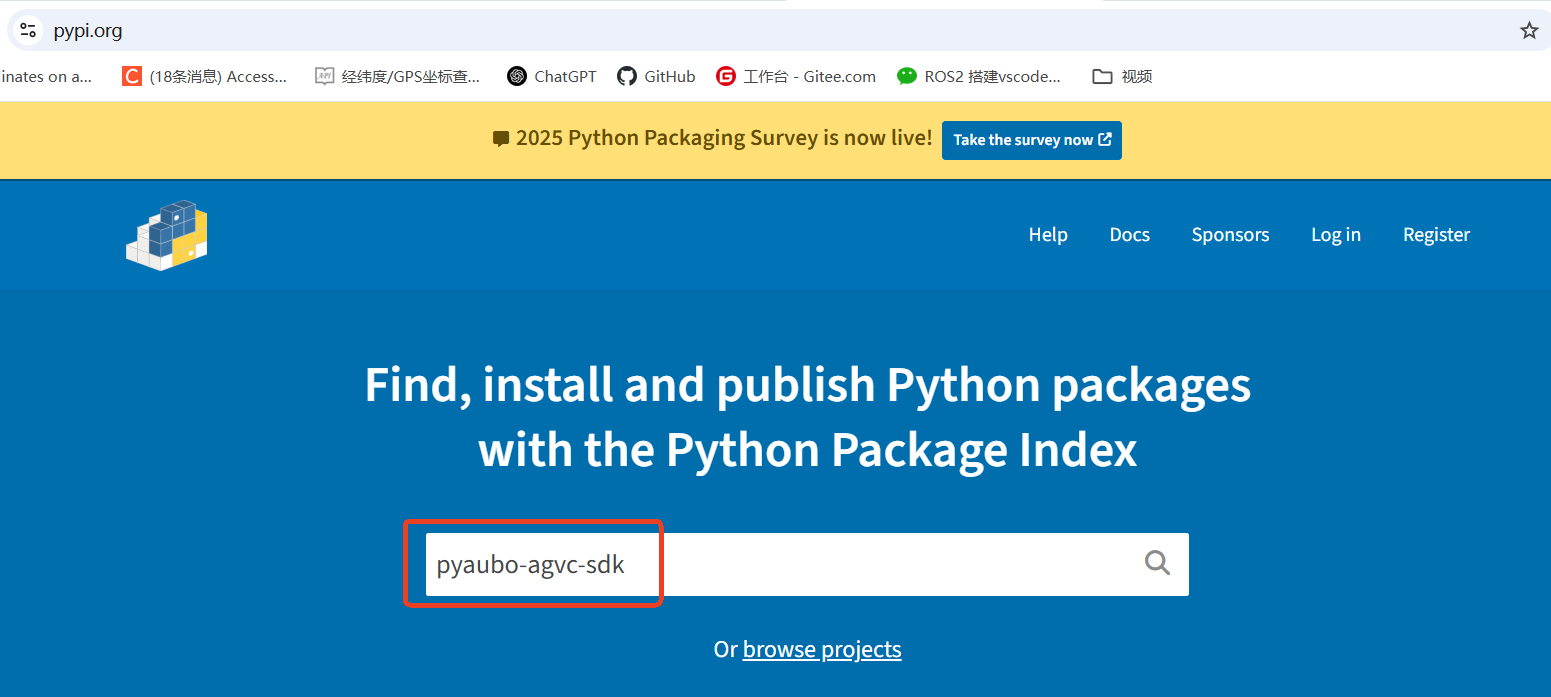
- 打开 PyPI 网址:https://pypi.org/
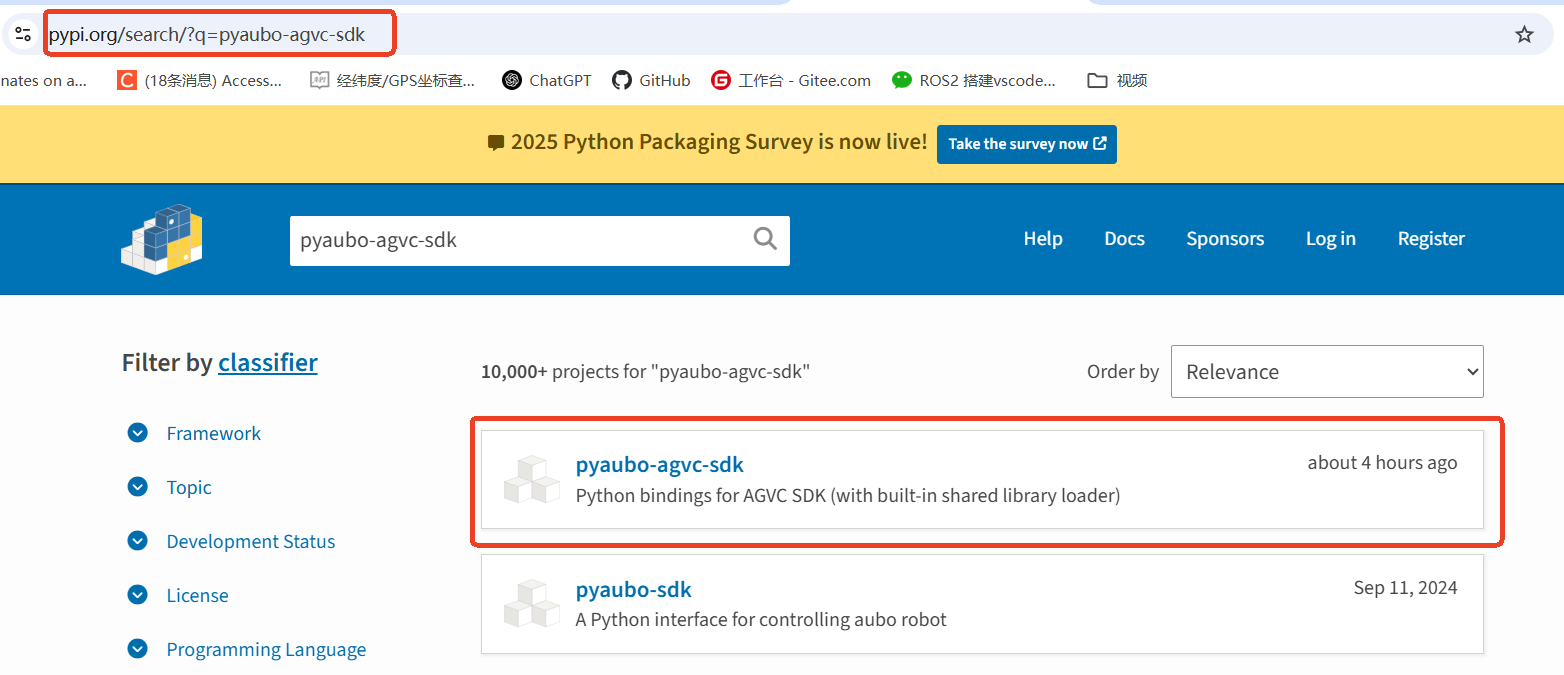
- 搜索 “pyaubo-agvc-sdk”
- 下载 pyaubo-agvc-sdk:
- 进入包详情页,点击“Download files”,在“Built Distributions”栏选择对应版本的
.whl文件下载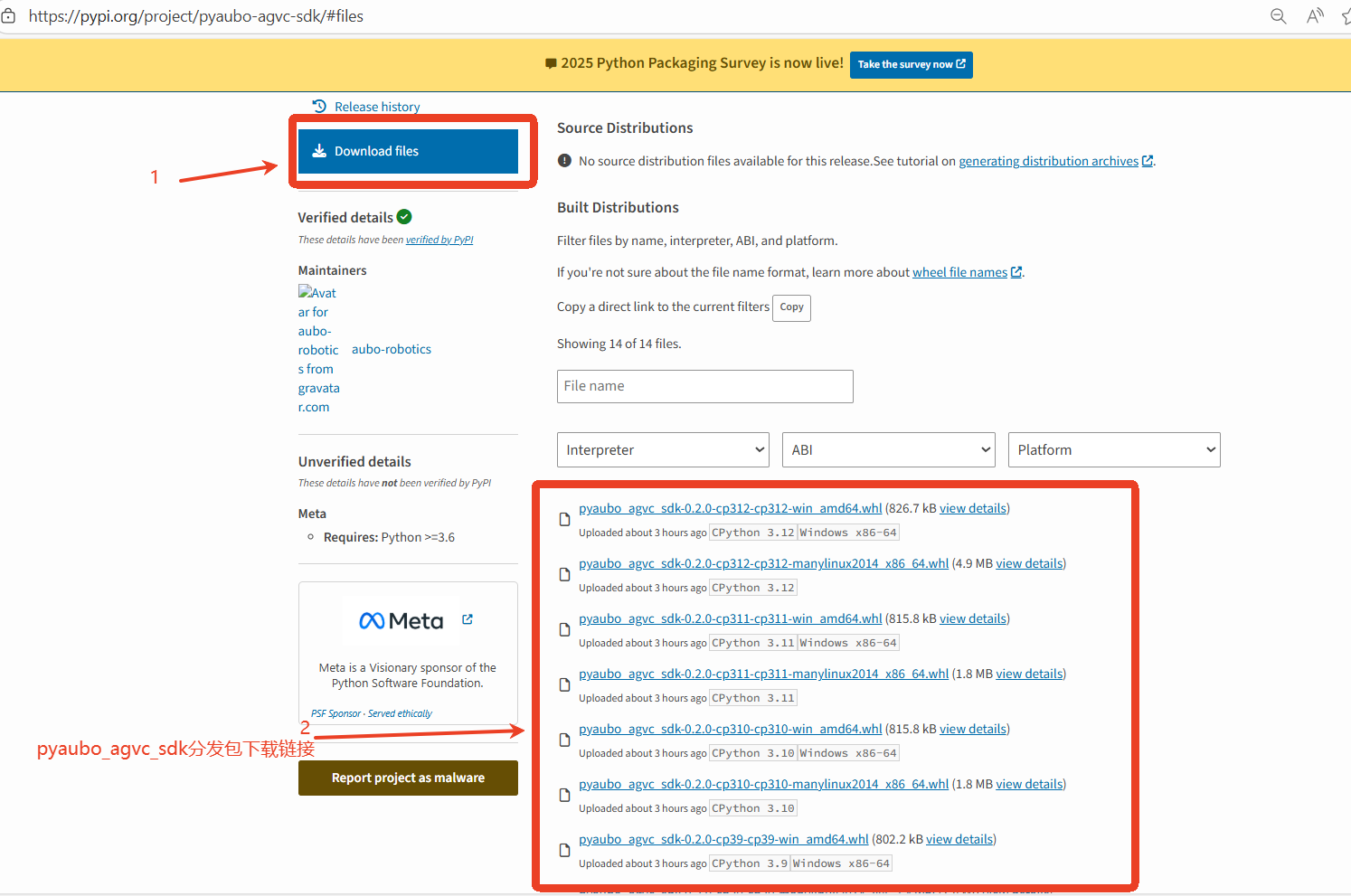
- 切换到
.whl文件所在目录,通过pip安装(以Linux x86 Python 3.10为例):bashpip install pyaubo_agvc_sdk-0.1.0-cp310-cp310-manylinux2014_x86_64.whl - 安装成功示例:

方法 2:通过 pip 命令直接安装
- 安装最新版本:bash
pip install pyaubo-agvc-sdk - 安装指定版本(以
0.2.0为例):bashpip install pyaubo-agvc-sdk==0.2.0
方法 3:通过 PyCharm 安装
- 打开
File -> Settings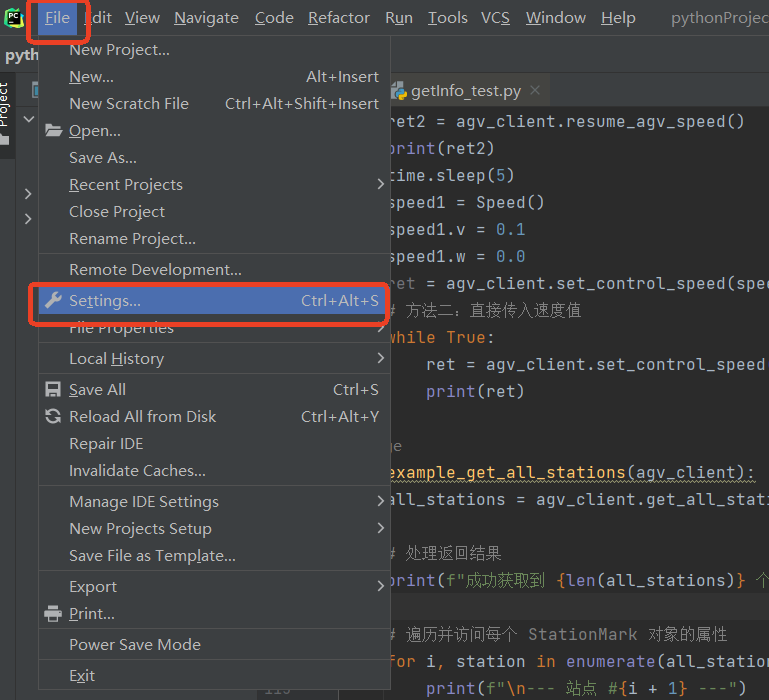
- 在
Python Interpreter页面点击+标志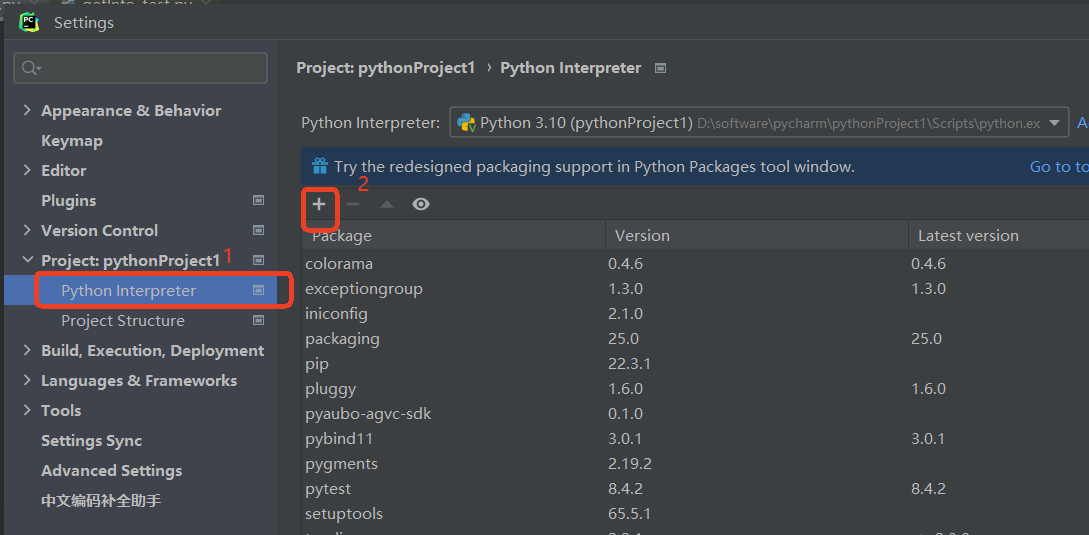
- 搜索“pyaubo-agvc-sdk”,选择版本后点击
Install Package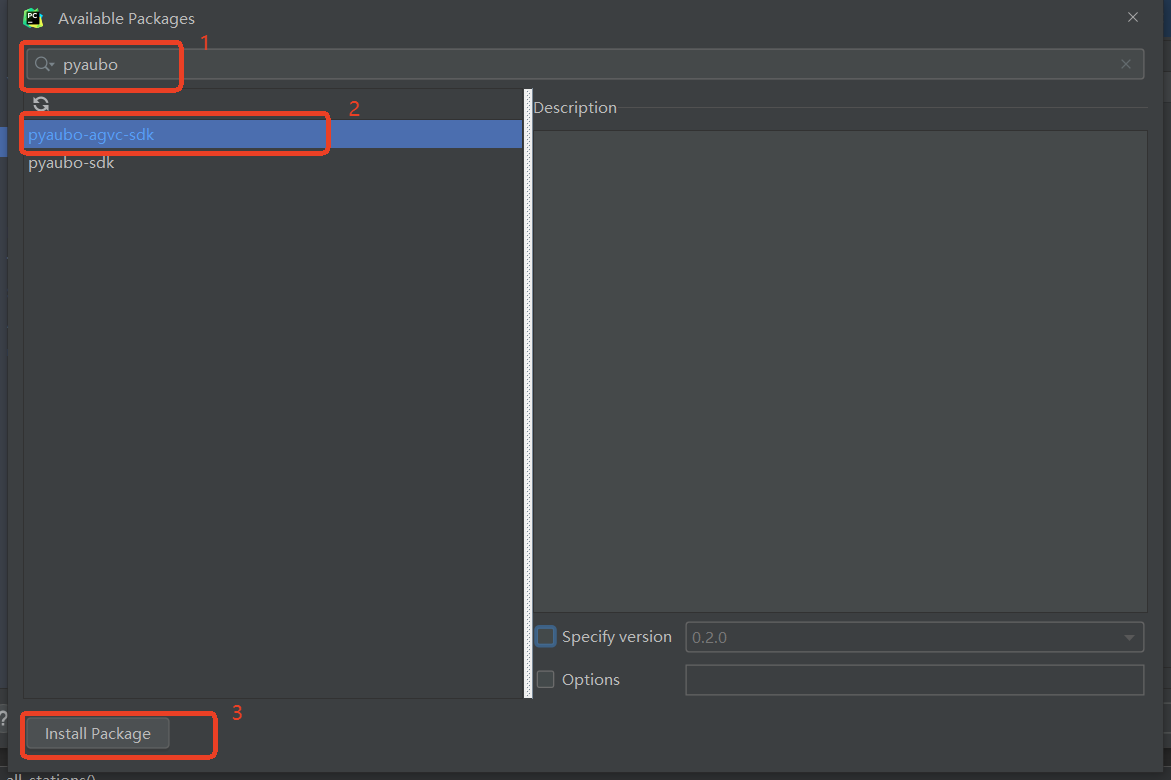
3.2 卸载方法
方法 1:通过 pip 命令卸载
bash
pip uninstall pyaubo-agvc-sdk方法 2:通过 PyCharm 卸载
- 打开
File -> Settings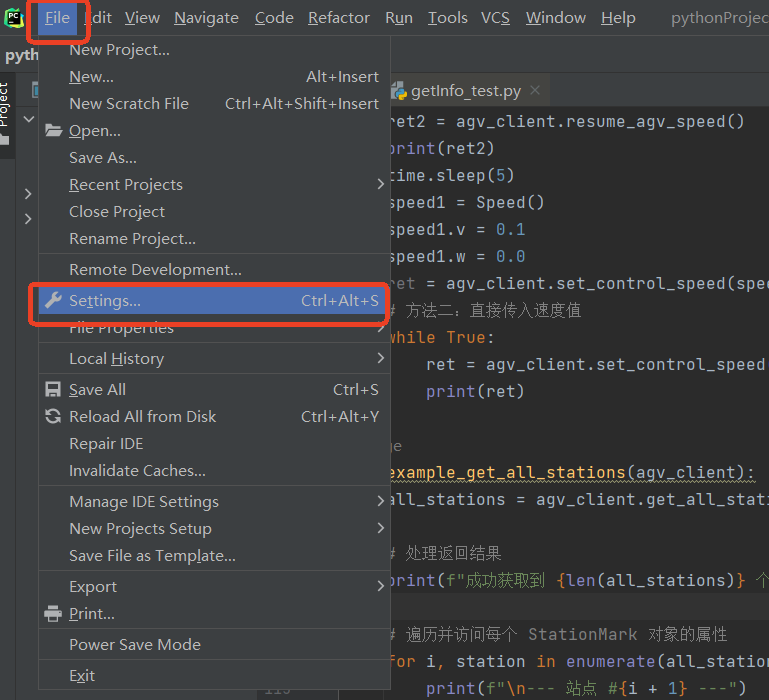
- 在
Python Interpreter界面选择pyaubo-sdk,点击-标志卸载,完成后点击OK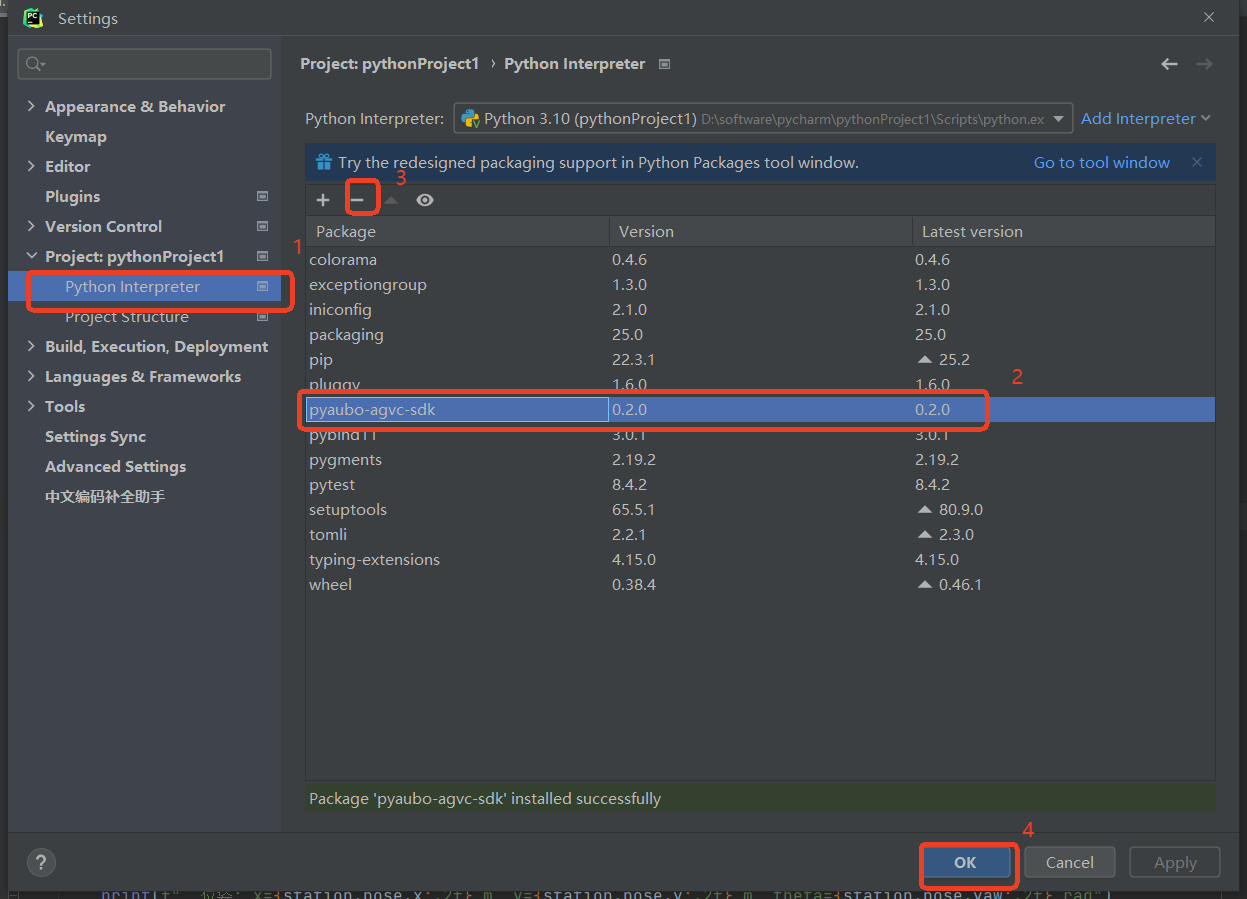
4 使用案例
4.1 SDK PC 端与机器人通信设置
SDK PC 端可通过以下两种方式与机器人通信:
1. 无线网络通信
通过无线局域网(Wi-Fi)实现通信,步骤如下:
- 在 PC 端连接机器人发出的 Wi-Fi 热点
- 测试网络连通性:
- 方法 1:使用
ping命令
打开终端,输入ping 192.186.192.100,通信成功示例: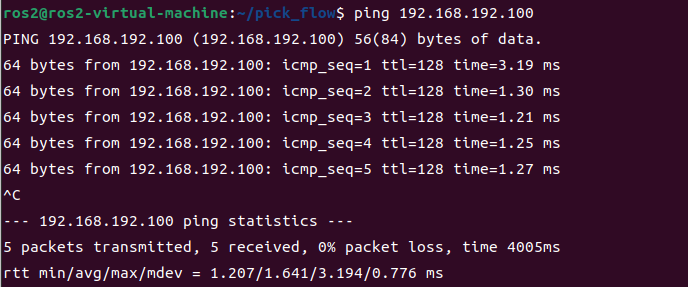
- 方法 2:使用
telnet命令
打开终端,输入telnet 192.168.192.100 30104,通信成功示例:
- 方法 1:使用
2. 有线网络通信
通过以太网连接实现通信,步骤如下:
- 用网线连接控制柜与 PC
- 配置网络参数(确保 PC 与机器人在同一网段):
- IP 地址前缀需一致(例如机器人 IP 为
192.168.192.100,PC IP 前缀需为192.168.192) - 子网掩码均为
255.255.255.0 - 网关需相同(通常设为
192.168.192.1)
- IP 地址前缀需一致(例如机器人 IP 为
- 测试网络连通性:
- 方法 1:使用
ping命令
打开终端,输入ping 192.186.192.100,通信成功示例: - 方法 2:使用
telnet命令
打开终端,输入telnet 192.168.192.100 30104,通信成功示例:
- 方法 1:使用
4.2 运行 Python SDK 示例
在 Linux 环境下
- 方式 1:使用 IDE 编译并运行
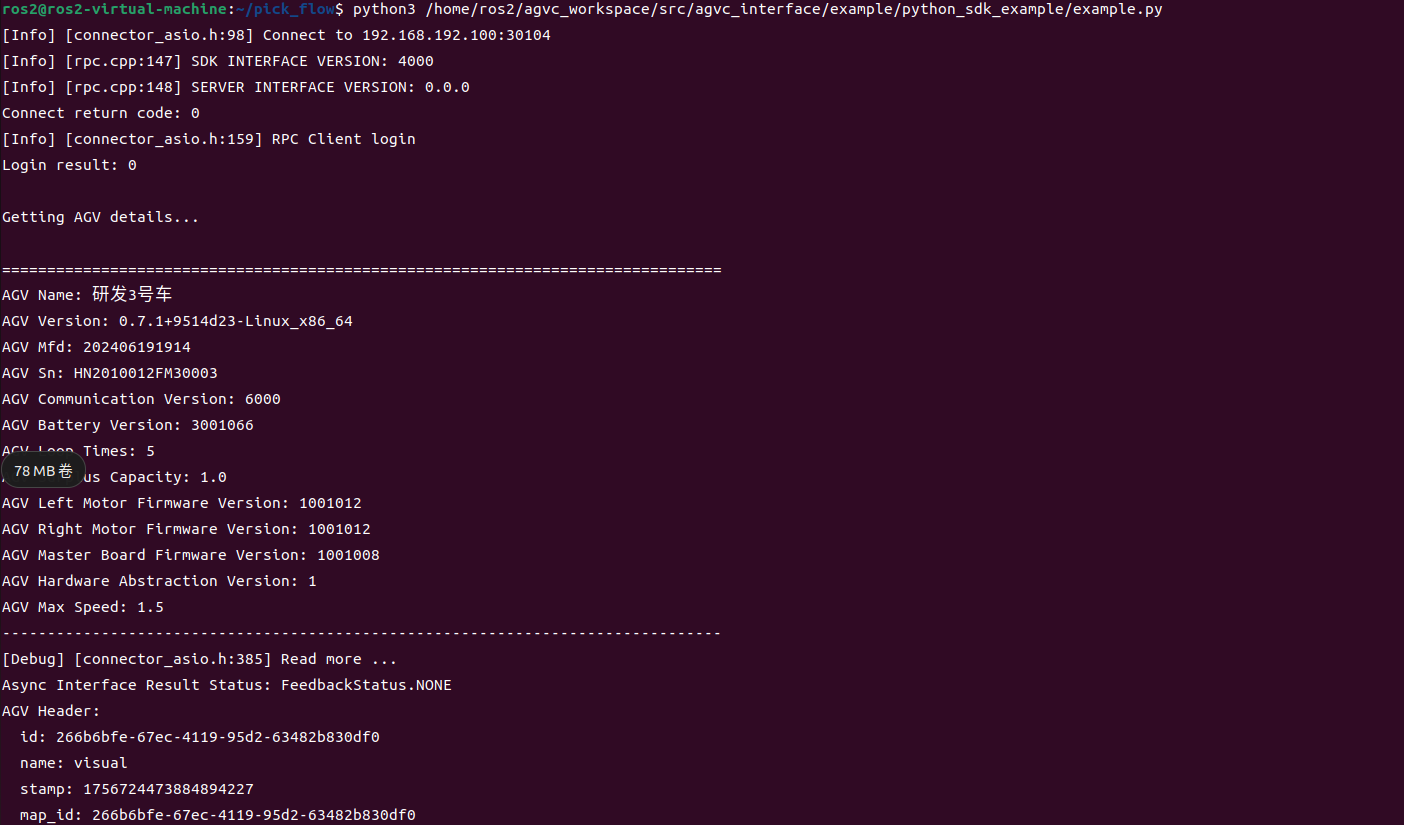
example.py - 方式 2:在终端中运行:bash
python 脚本路径/example.py - 运行成功后,终端将打印信息,机器人向前行驶:
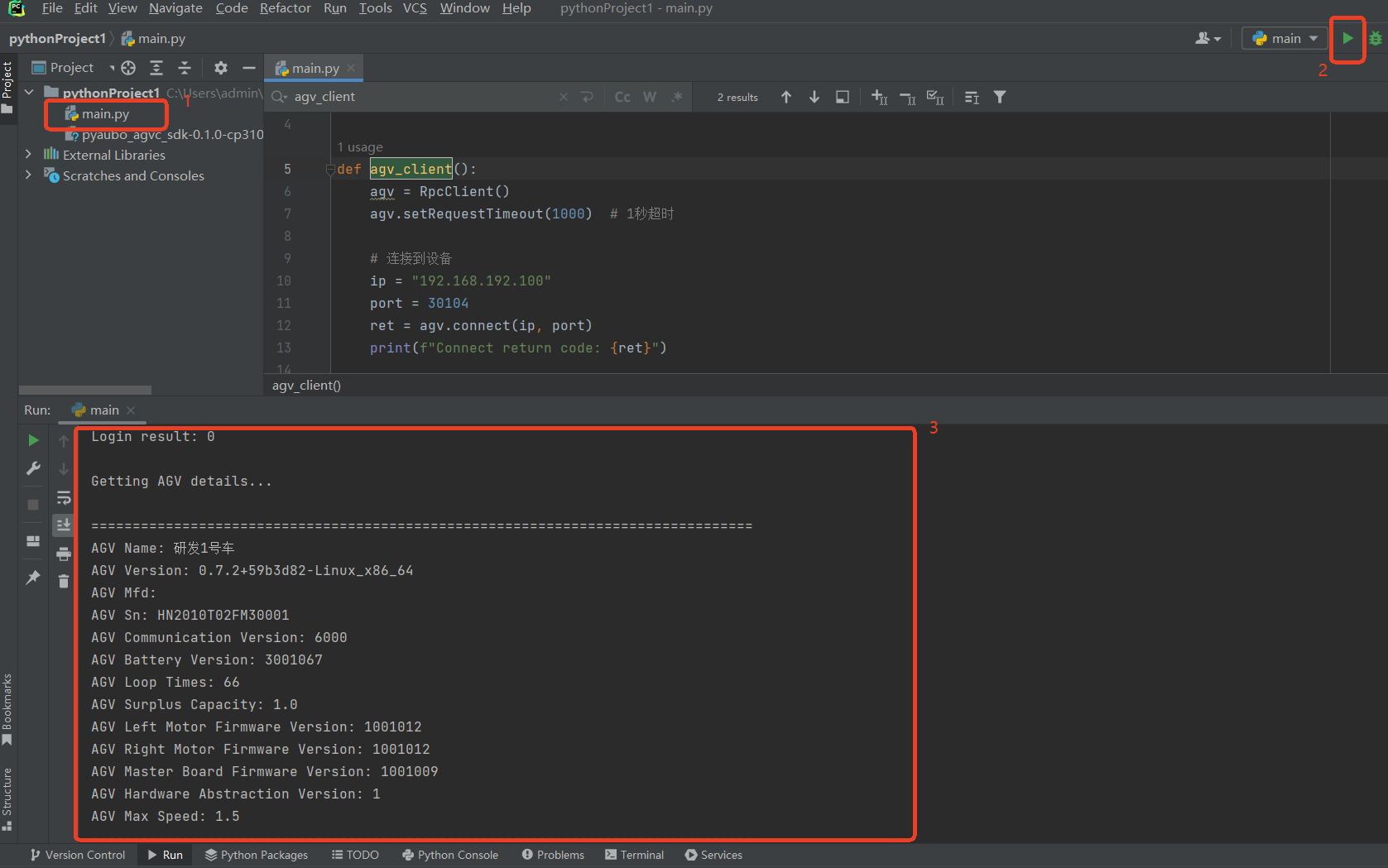
在 Windows 环境下
- 在 PyCharm 工程中新建
test.py文件 - 点击运行按钮执行脚本