Steering 系统功能说明文档
系统概述
Steering 系统是一个完整的机器人控制与管理平台,涵盖设备连接、系统设置、地图管理、任务调度和导航控制等全方位功能。通过直观的图形界面和专业的工具集,为用户提供高效、便捷的机器人操作体验。
功能详情
1. 输入IP连接设备功能
功能说明:用户可通过输入设备的 IP 地址直接连接并访问系统。这是系统初始连接的主要方式,适用于已知设备 IP 地址的场景。

使用描述:
- 打开系统后,进入主连接界面。
- 在输入框中准确输入机器人的 IP 地址(例如:192.168.1.100)。
- 点击“连接”按钮,系统将尝试与设备建立通信。
- 连接过程中,界面会显示连接状态(如“连接中”、“已连接”或“连接失败”)。
- 若连接失败,请检查 IP 地址是否正确、网络是否通畅,并重新尝试。
2. 搜索设备功能
功能说明:系统支持自动搜索同一网络下的可用设备,方便用户快速发现并连接设备,无需手动输入 IP 地址。
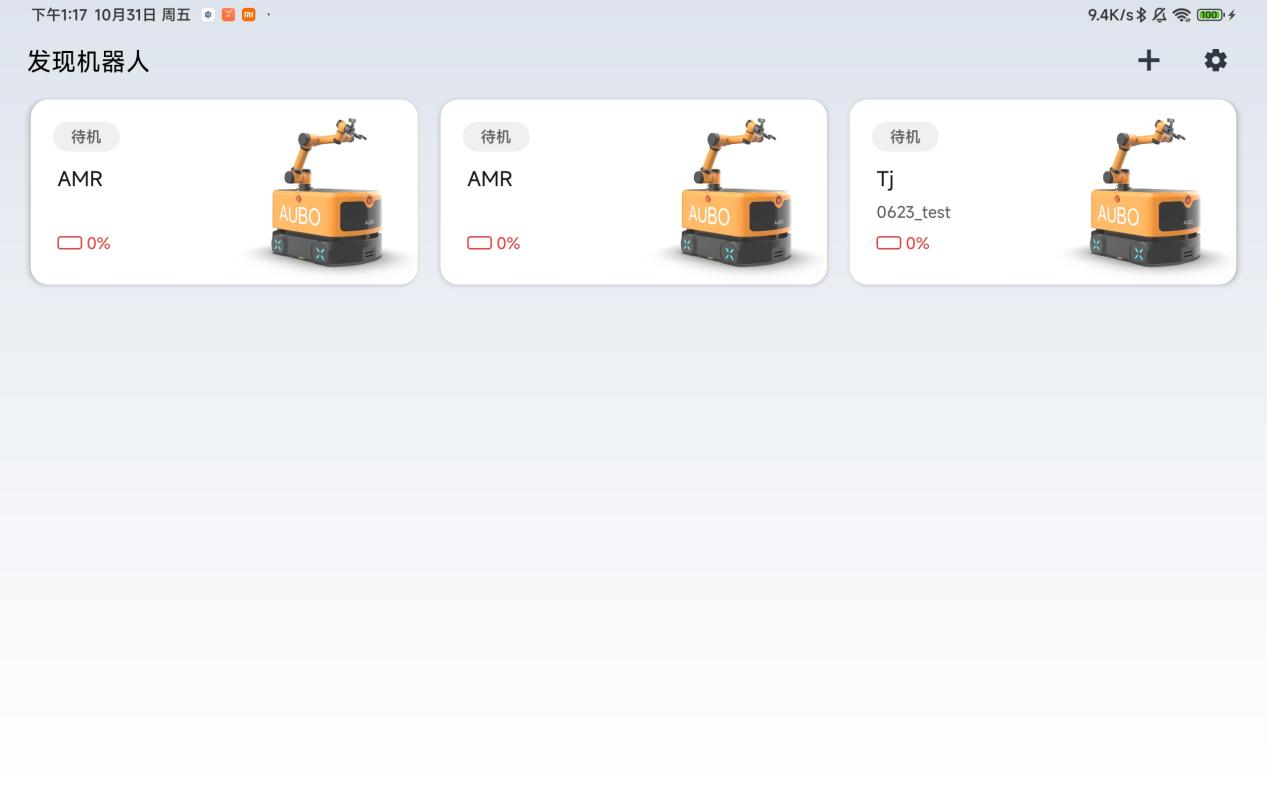
使用描述:
- 在连接界面中,点击“搜索设备”按钮。
- 系统将自动扫描当前局域网内所有在线的机器人设备。
- 扫描完成后,设备列表将显示所有发现的设备名称和IP地址。
- 用户可从列表中选择目标设备,点击“连接”即可快速建立连接。
- 若设备未列出,可尝试下拉“刷新”重新搜索。
3. 设置-导出日志功能
功能说明:提供完整的日志导出功能,支持选择时间范围和日志类型,便于用户进行故障排查与系统维护分析。
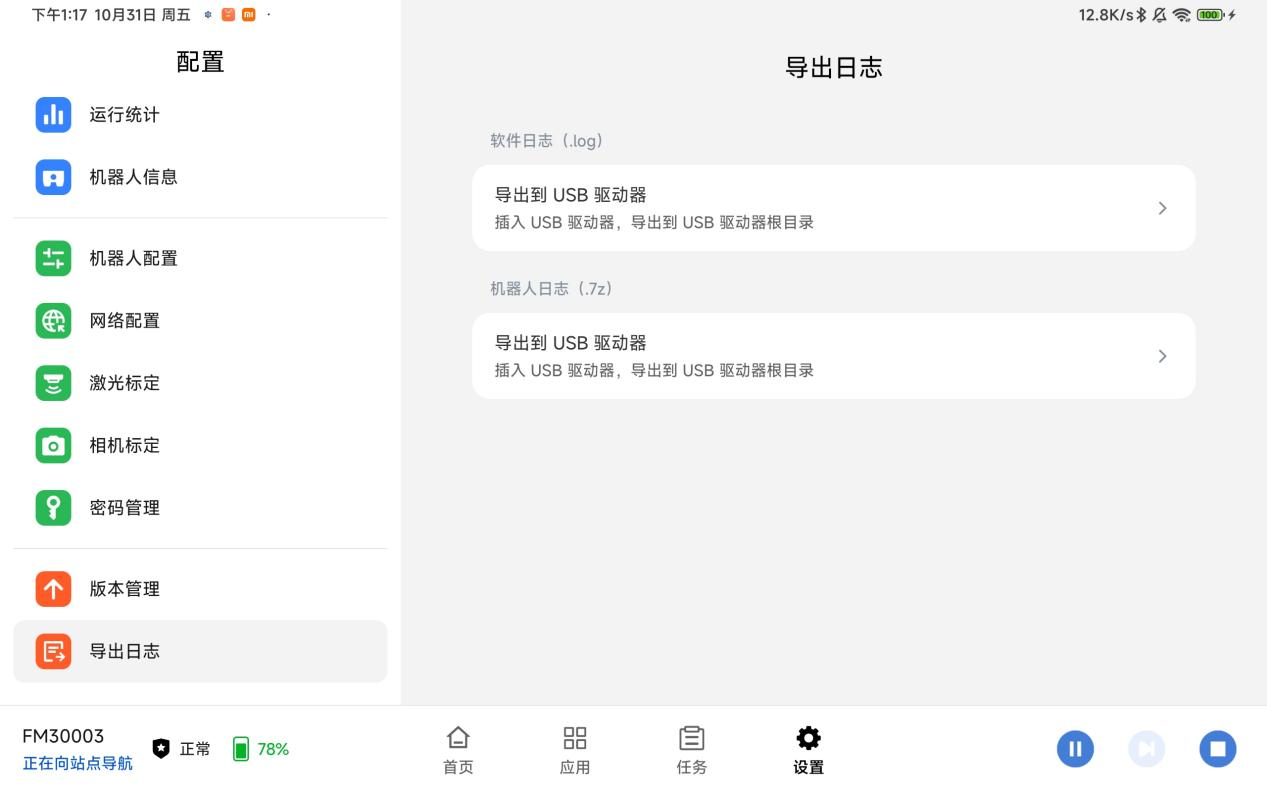
使用描述:
- 进入“设置”菜单,选择“导出日志”选项。
- 可选择导出软件(App)日志或机器人日志。
- 插入 U 盘确认后即可完成导出。
4. 设置-版本管理
功能说明:显示当前系统版本信息,支持软件更新/卸载,确保系统始终保持最佳状态。 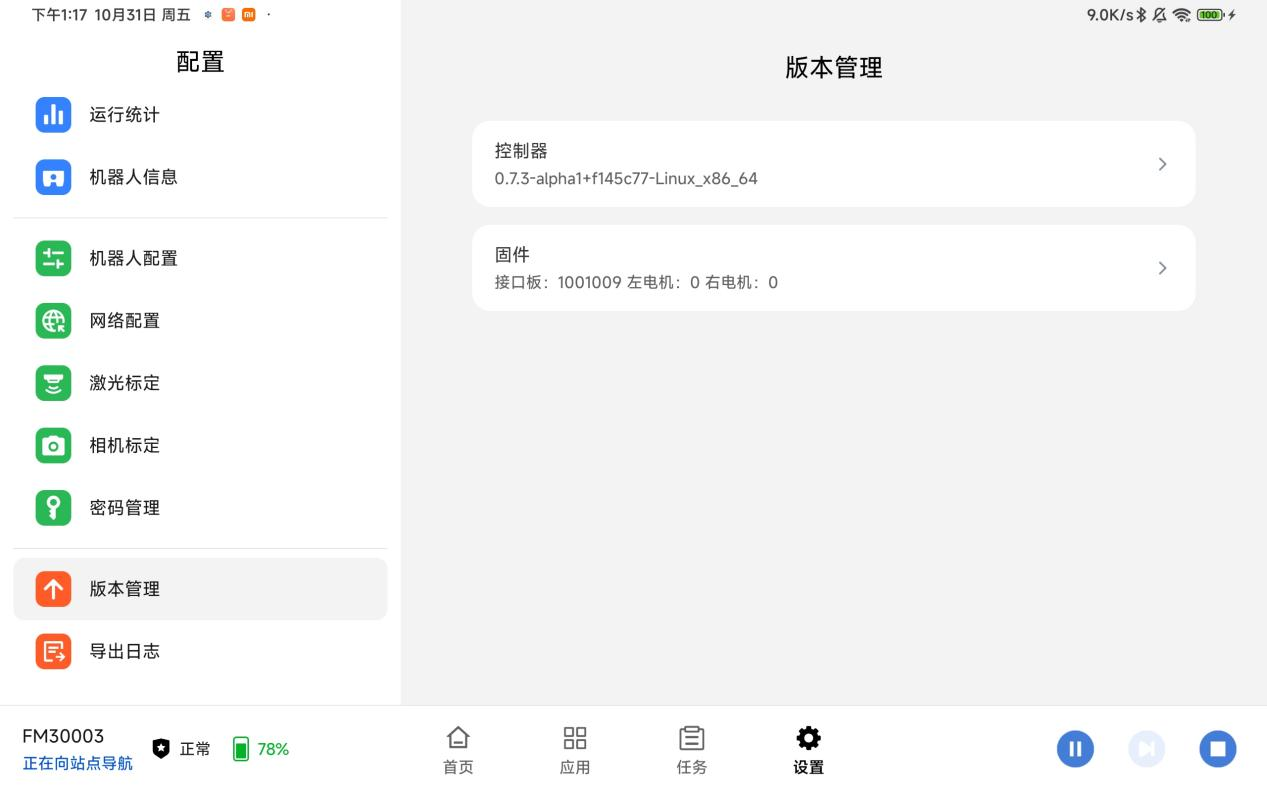
使用描述:
- 支持控制器更新操作。
- 查看当前系统版本号、发布日期等信息。
- 通过U盘完成软件的安装/卸载。
5. 设置-密码管理
功能说明:用户可在此修改登录密码,支持密码强度验证,增强系统安全性和账户保护。
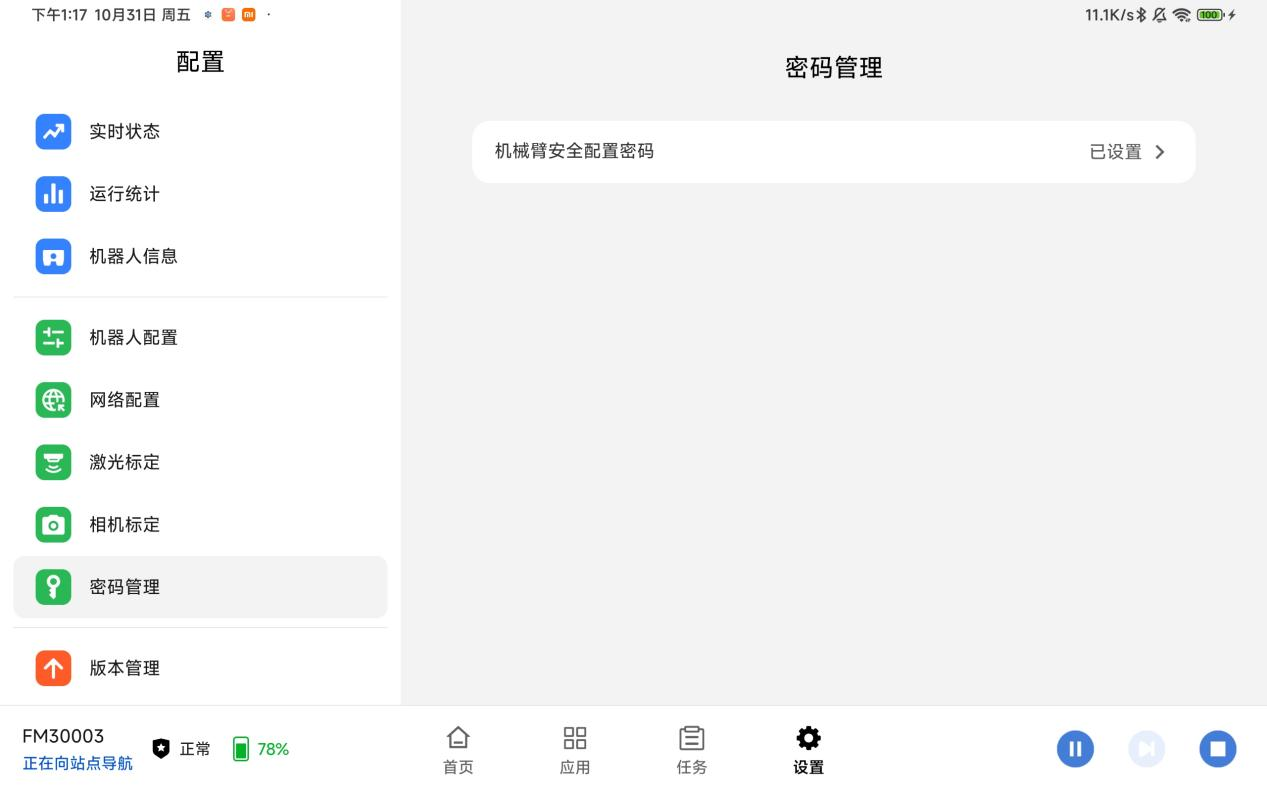
使用描述:
- 进入“设置”→“密码管理”界面。
- 输入当前密码进行身份验证。
- 输入新密码。
- 点击“保存”完成密码修改,系统会提示修改成功。
6. 设置-相机标定
功能说明:提供专业的相机标定工具和流程,确保图像采集的准确性和视觉导航的精度,支持参数调整和校准验证。
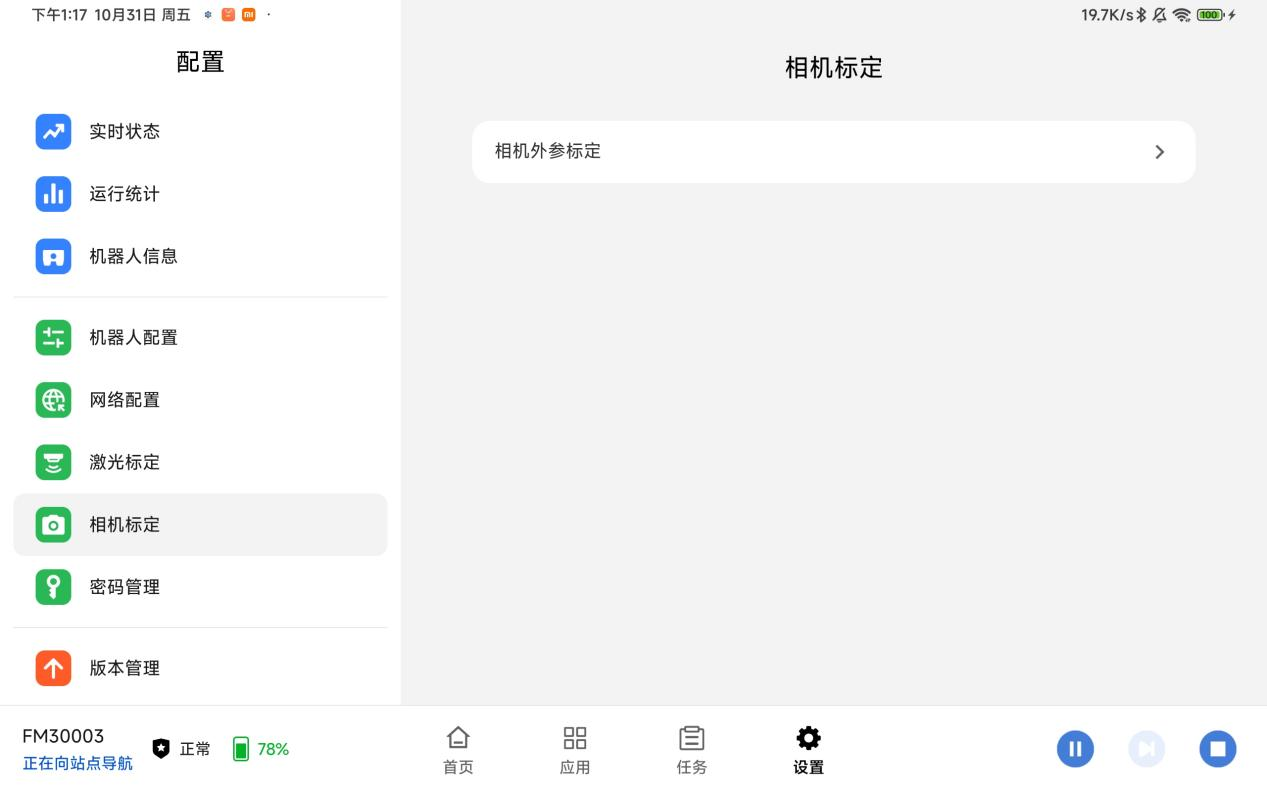
使用描述:
- 进入“设置”→“相机标定”界面。
- 将标定板放置在相机视野内,确保清晰可见。
- 点击“开始标定”,系统将自动采集多张图像并计算参数。
- 用户可手动调整焦距、预览效果。
7. 设置-激光标定
功能说明:激光雷达设备的标定界面,提供标定参数配置和精度测试功能,确保测距与导航的准确性。

使用描述:
- 进入“设置”→“激光标定”界面。
- 在自动模式下,系统将引导用户完成环境扫描与参数计算。
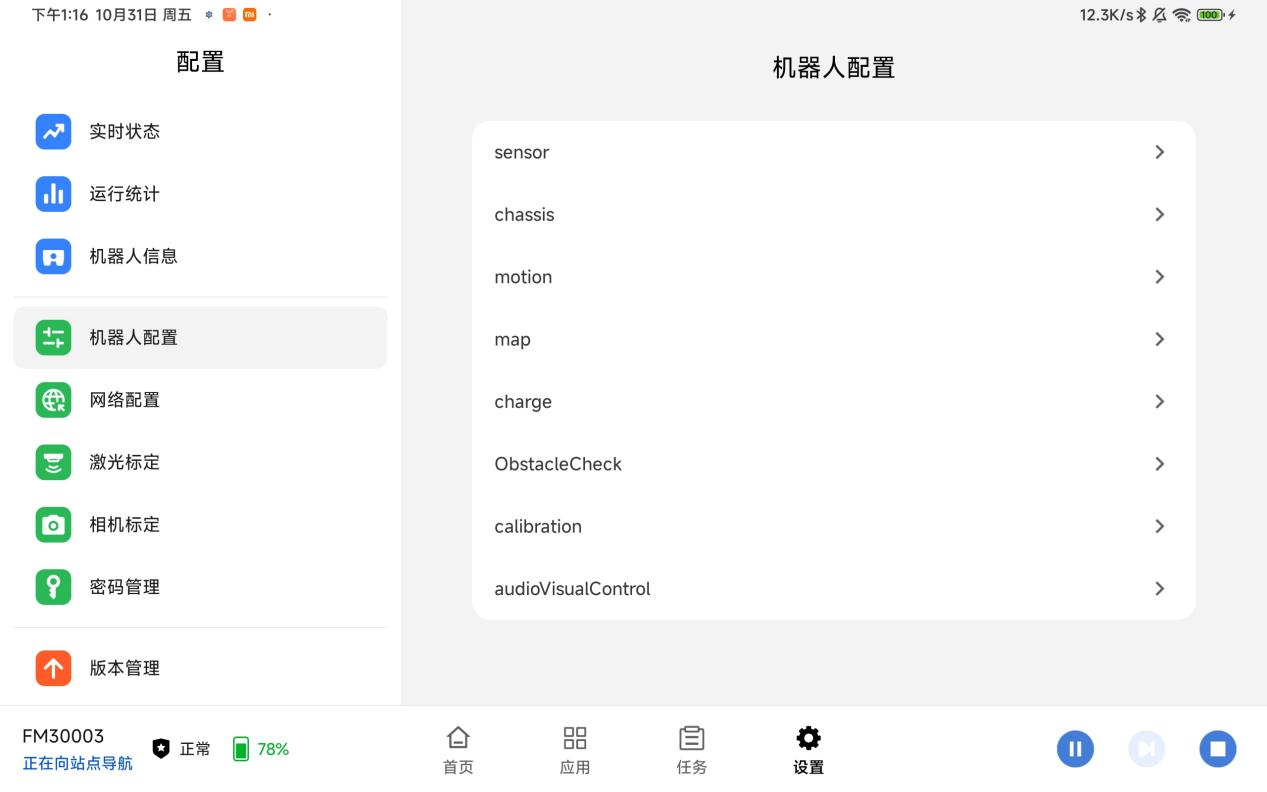
8. 设置-机器人配置
功能说明:用户可对机器人各项参数进行详细配置,包括运动控制参数、通信设置、传感器配置等系统级参数。
9. 设置-机器人信息
功能说明:展示机器人的详细信息面板,包括型号、序列号、硬件版本、软件版本等基础信息和实时状态概览。

10. 设置-运行统计
功能说明:统计并可视化展示机器人的运行数据,包括总工作时长、任务执行次数、里程统计等运行指标。
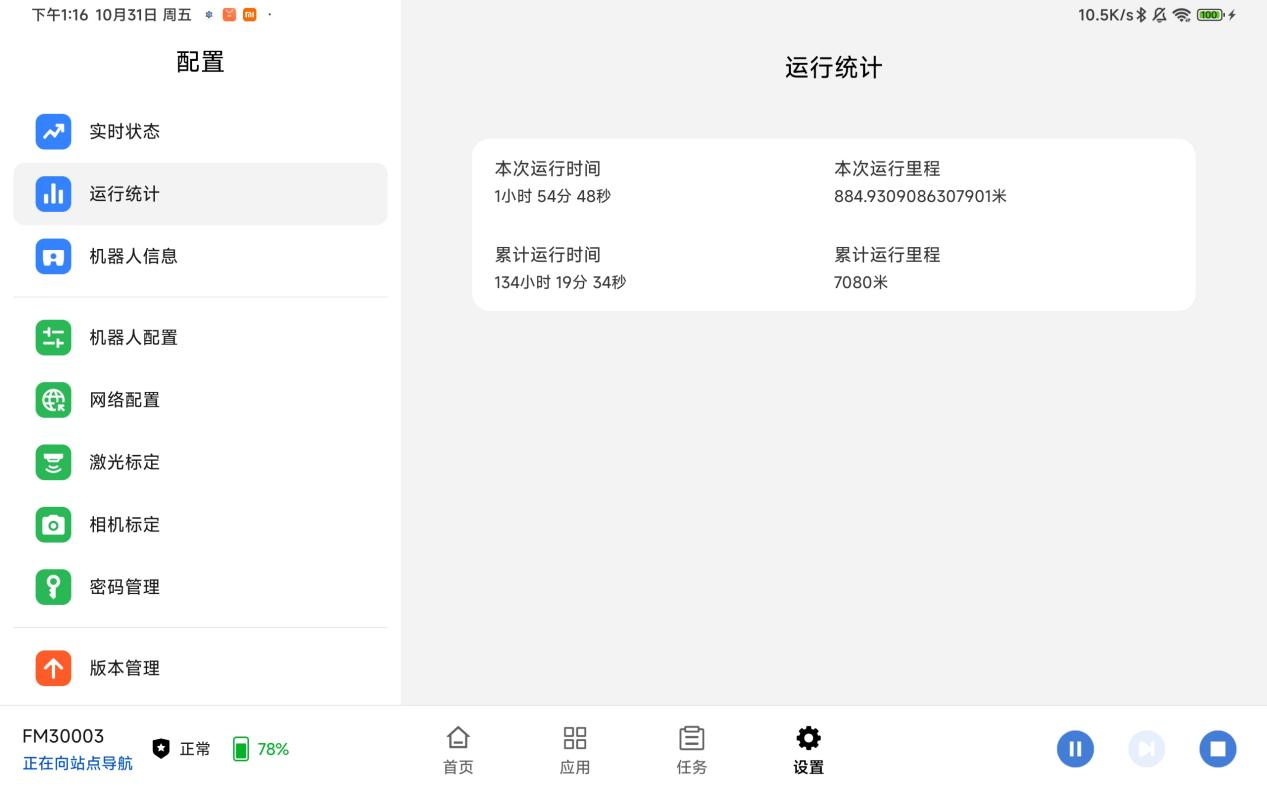
使用描述:
- 进入“设置”→“运行统计”界面。
- 选择统计时间范围(如今日、本周、本月或自定义)。
- 查看图表和数字展示的运行时长、任务次数、行驶里程等。
- 支持导出统计报告为 Excel 或 PDF 格式。
- 点击“重置统计”可清空历史数据。
11. 设置-实时状态
功能说明:实时监控显示机器人的各项状态信息,包括电量、网络连接状态、各传感器数据、系统负载等关键指标。

12. 应用-部署路线(编辑站点、路线功能)
功能说明:完整的地图路线编辑界面,用户可在地图上添加、编辑站点,添加编辑区域规划机器人的运行路径,设置路径属性。
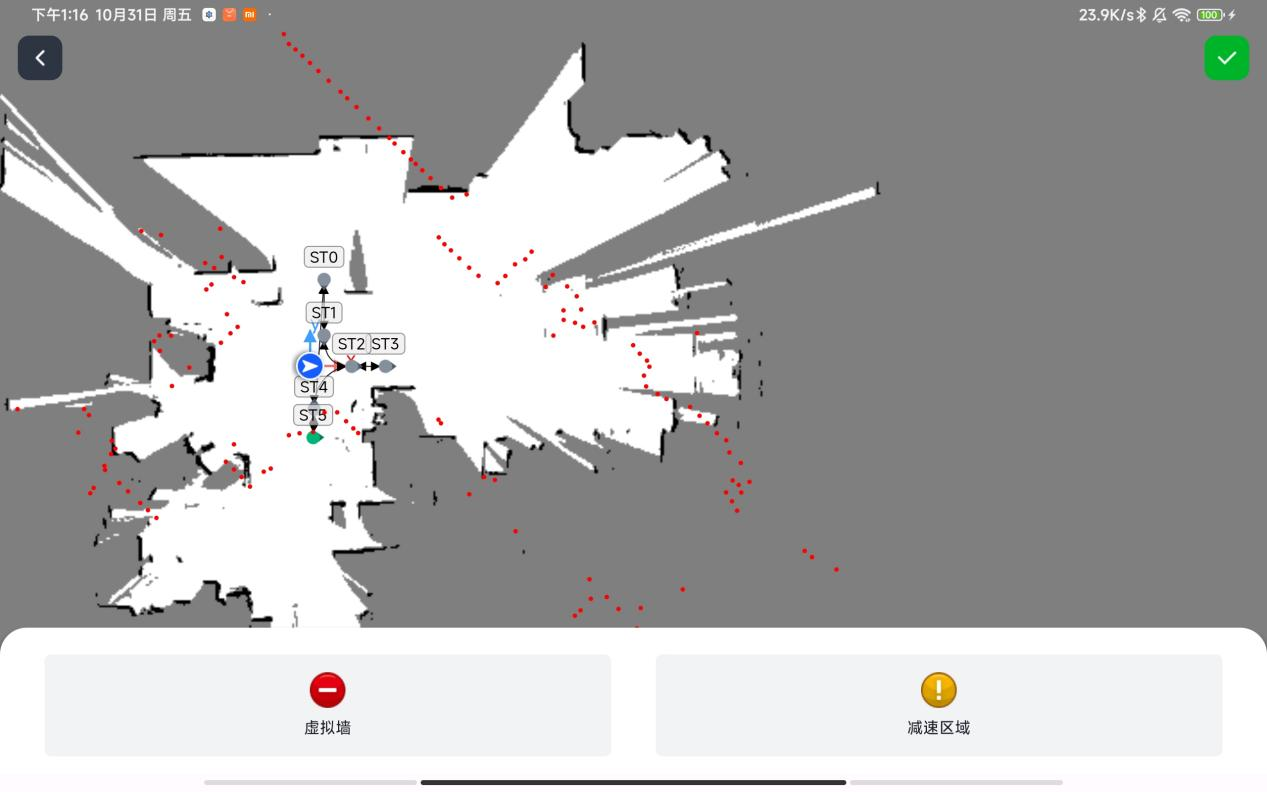
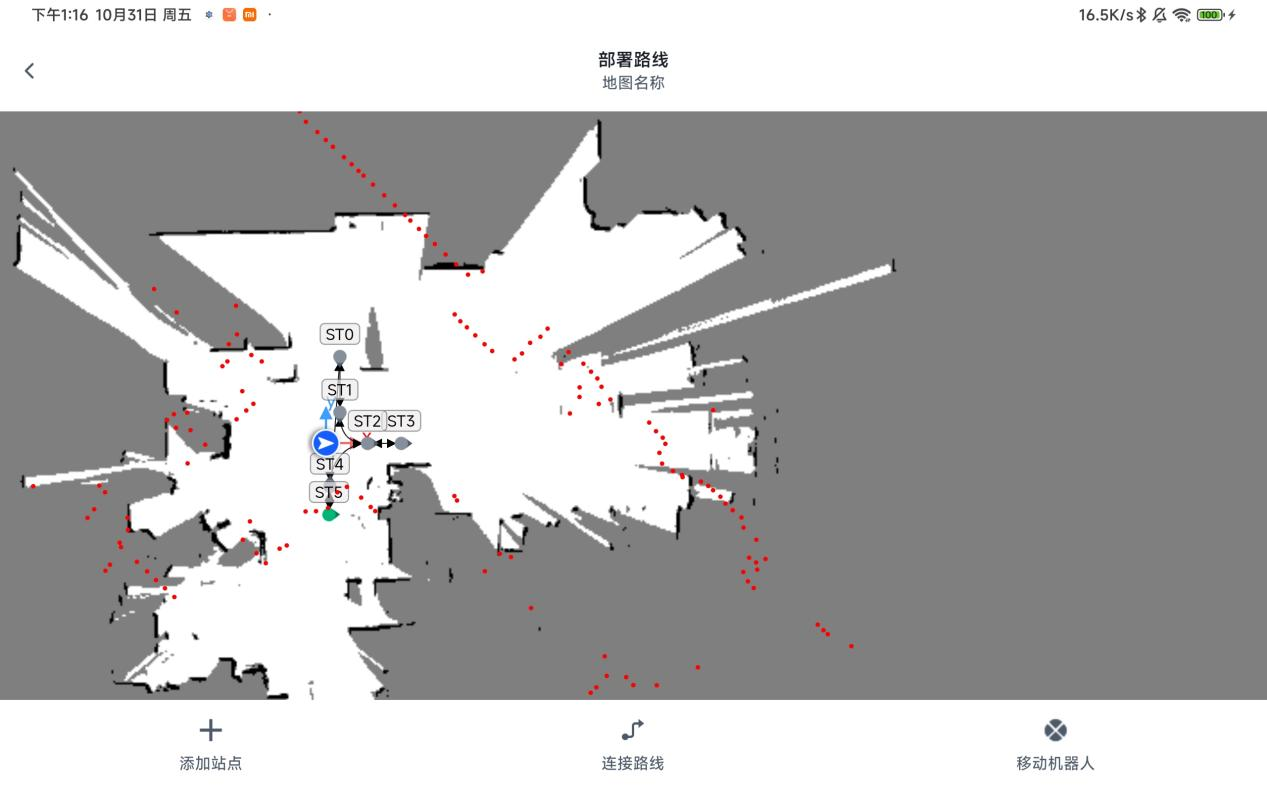
使用描述:
- 点击添加站点可进行添加站点操作。
- 点击连接路线可进行连接路线操作。
- 在地图中选择站点、路线可进行编辑操作。
13. 应用-地图管理功能
功能说明:地图库管理界面,支持对已创建的多张地图进行管理,包括地图的保存、加载、删除、重命名等操作。

14. 应用-地图编辑功能
功能说明:提供丰富的地图编辑工具集,用户可自定义地图内容,如添加/删除障碍物、设置禁行区、编辑路径点等。
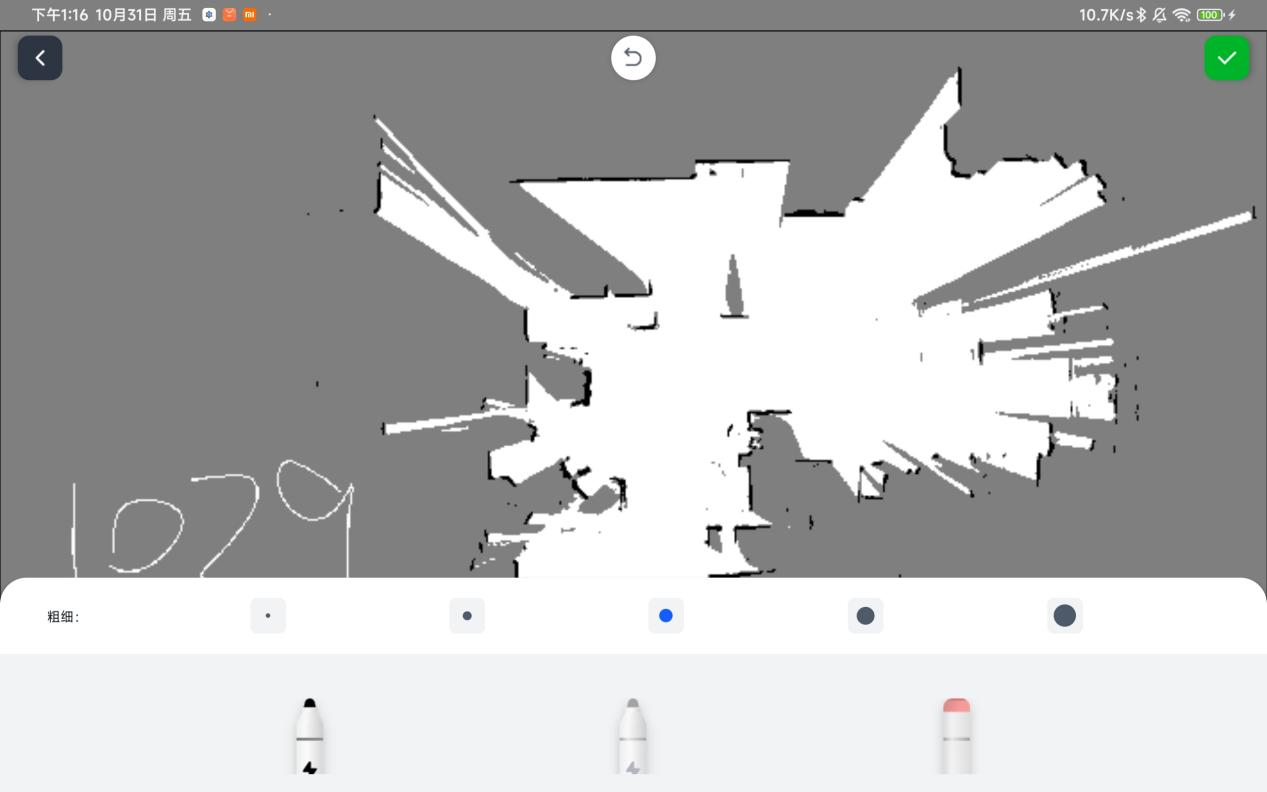
使用描述:
- 进入“应用”→“地图编辑”界面。
- 使用工具栏选择编辑工具。
- 在地图上绘制障碍物或禁行区。
15. 应用-构建地图功能
功能说明:地图构建工作界面,支持通过机器人扫描环境并自动构建地图,提供建图参数设置和实时建图进度显示。
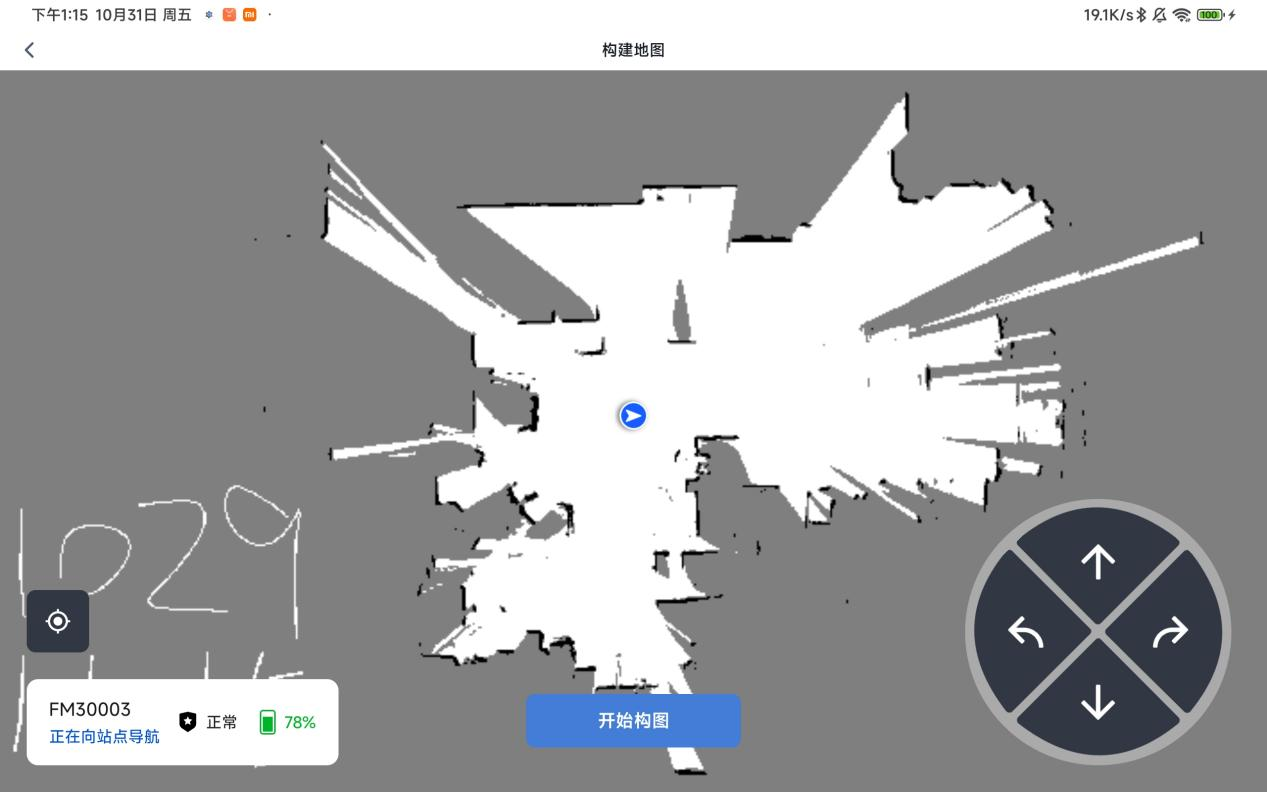
使用描述:
- 进入“应用”→“构建地图”界面。
- 点击“开始构图”,机器人将开始自主扫描环境,移动机器人可更新地图。
- 建图完成后点击“保存”。
16. 首页地图-移动、重定位、巡线导航
功能说明:系统主地图操作界面,集成手动移动控制、机器人重定位、巡线导航启动等核心导航功能,提供直观的地图交互体验。
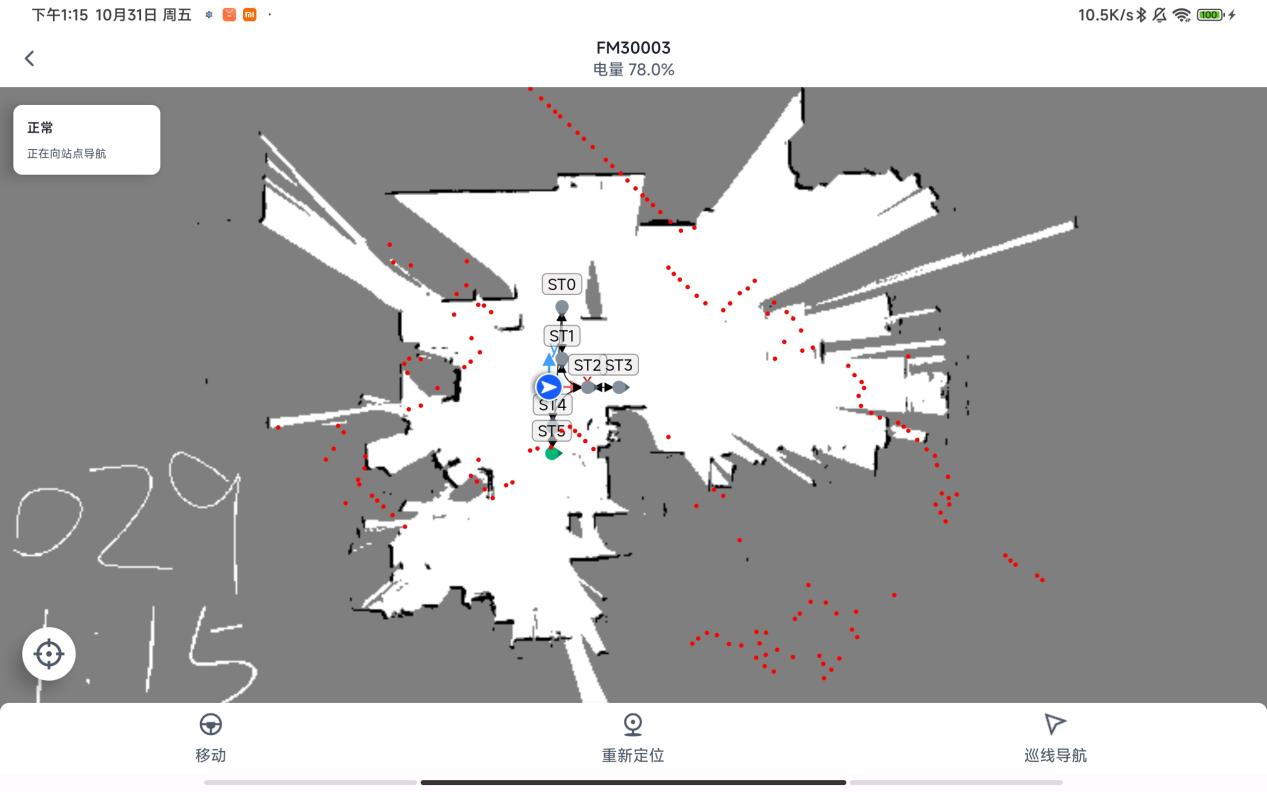
使用描述:
- 点击移动可进行“手动控制”。
- 点击“重定位”按钮,拖动机器人图标到地图上的正确位置以校正定位。
- 选择预设路线后点击“开始巡线”,机器人将沿路径自动导航。
17. App首页
功能说明:系统主控制面板,展示机器人核心状态信息、快捷操作入口、地图概览和常用功能快捷访问。
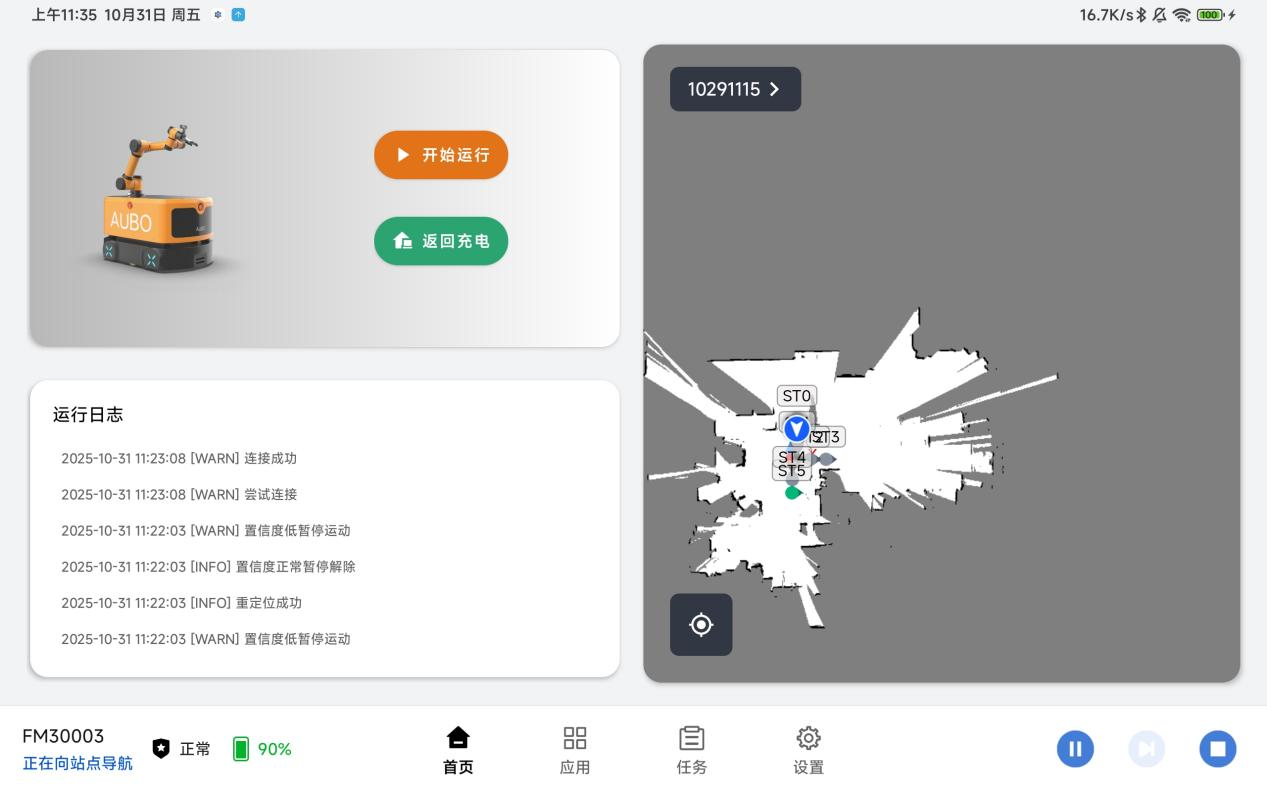
使用描述:
- 首页顶部显示机器人电量、网络状态、当前任务等核心信息。
- 中间区域为地图概览,支持缩放和拖动查看。
- 底部快捷栏提供“任务”、“地图”、“设置”等常用功能入口。
- 点击“状态详情”可跳转到实时状态页面。
- 支持自定义首页布局,长按图标可拖动排序。
18. App升级功能
功能说明:系统更新管理界面,提供App的在线升级功能,支持版本检查、下载更新和安装,确保系统功能持续更新。

使用描述:
- 进入“设置”→“软件升级”界面。
- 点击“检查更新”,系统将连接服务器检测新版本。
- 如有更新,显示版本说明和更新大小,点击“下载”开始下载更新包。
- 下载完成后点击“安装”。
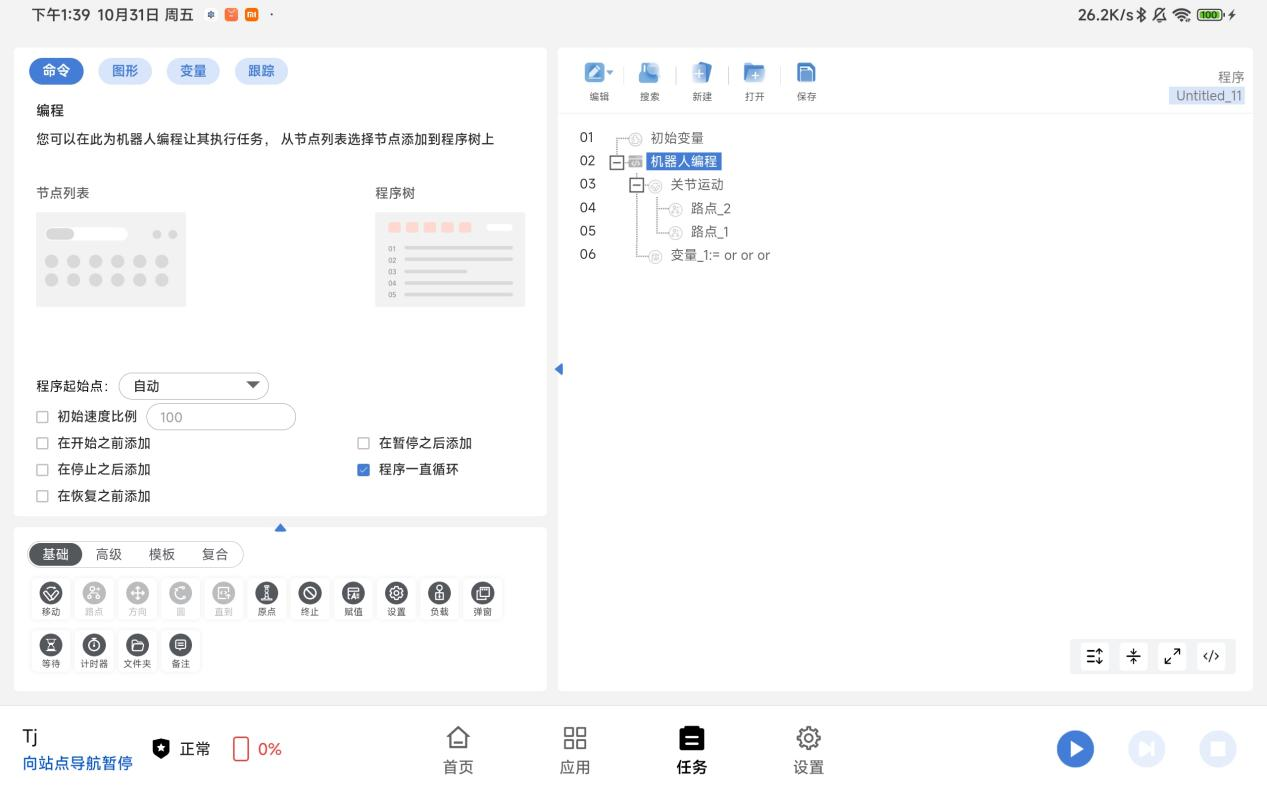
19. App任务模块
功能说明:任务调度与管理中心,用户可在此创建、编辑、管理和执行各类机器人任务。
20. App应用模块
功能说明:功能应用集成中心,分类展示系统所有功能模块入口,方便用户快速访问各项应用功能,提高操作效率。
