遨博丰禾系列 Farm200 农业采摘机器人硬件说明
1 简介
产品用途及适用范围
遨博海纳系列移动式协作机器人可灵活控制协作机器人、自动导航底盘(AGV)、视觉、末端夹爪等工具。多合一控制系统带来了简单便捷、安全可靠、扩展灵活、高效协同的全场景交互体验,可以灵活适应各种工作环境,省却繁杂操作,通过手眼脚配合来实现移动空间的物品分拣运输,可用于工件的抓取、装配、搬运、装卸,还可以快速部署在自动化工厂、仓库分拣、自动化超市和许多其他场景中,为自动化物料搬运和物料分拣提供自动化和灵活的操作支持。
- FARM200
- 二层结构(升降/固定)
- AUBO - 协作机器人
- 带视觉夹爪(电动/气动)
2 自动导航底盘(AGV)
2.1 基本功能
自动导航底盘(AGV)主要有以下功能:
- 实时定位及建图(SLAM)
- 建立站点、路径规划
- 路径导航
- 自动进桩充电
- 安全急停、安全减速
- 提供多种功能按键、部件
- 提供机械、硬件、软件接口供开发使用
2.2 按键及部件介绍
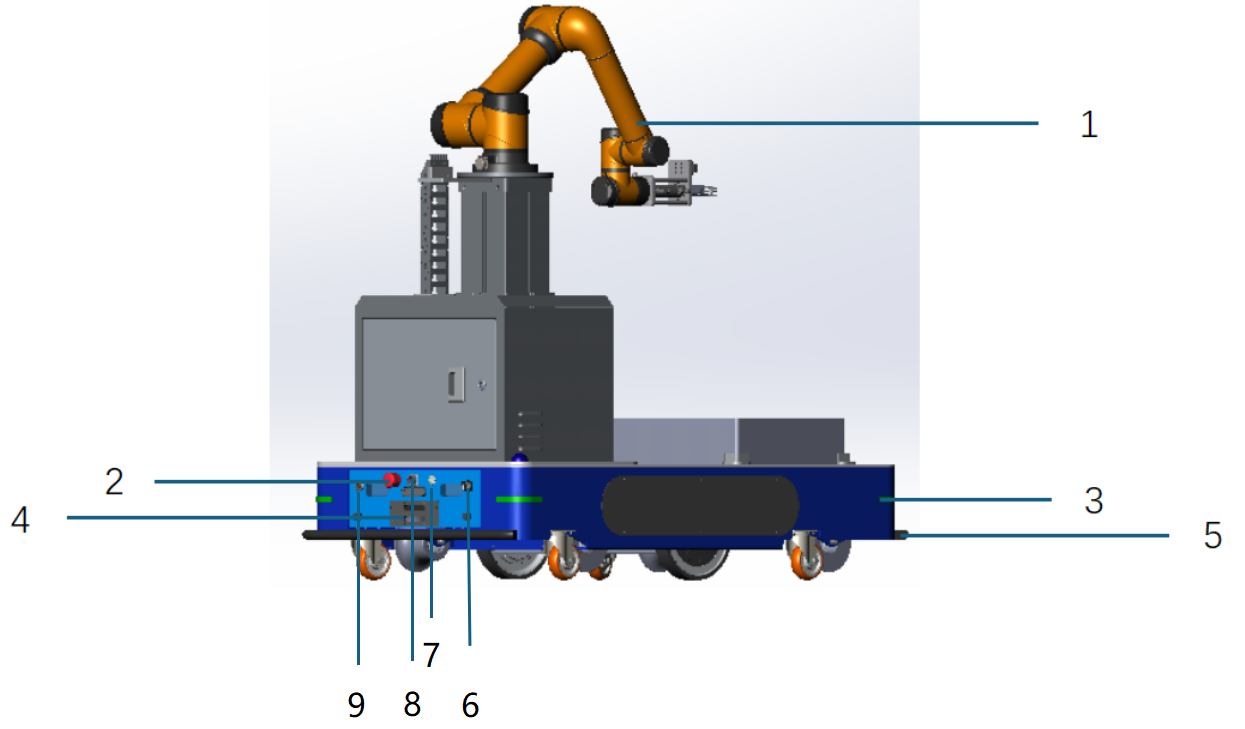
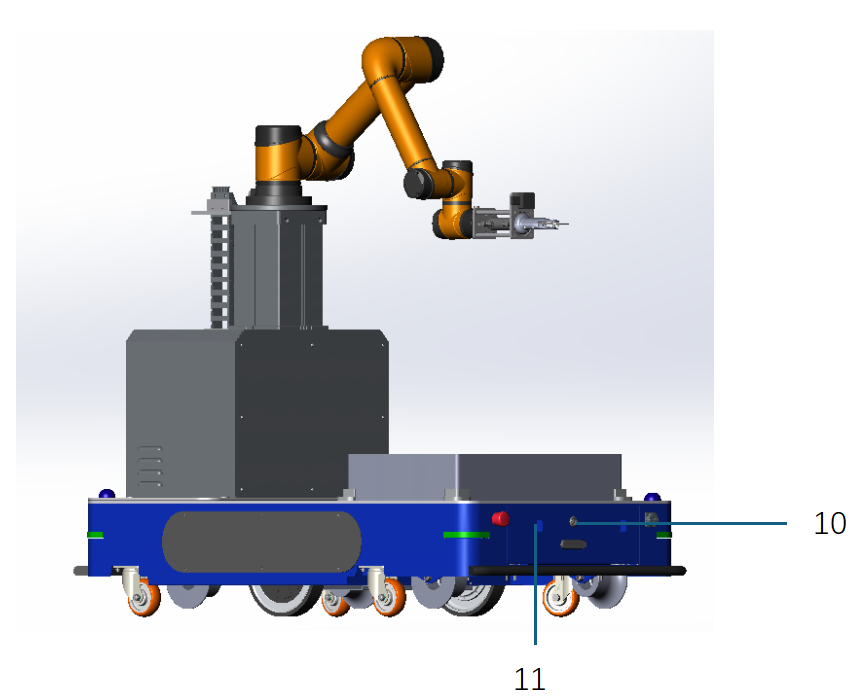
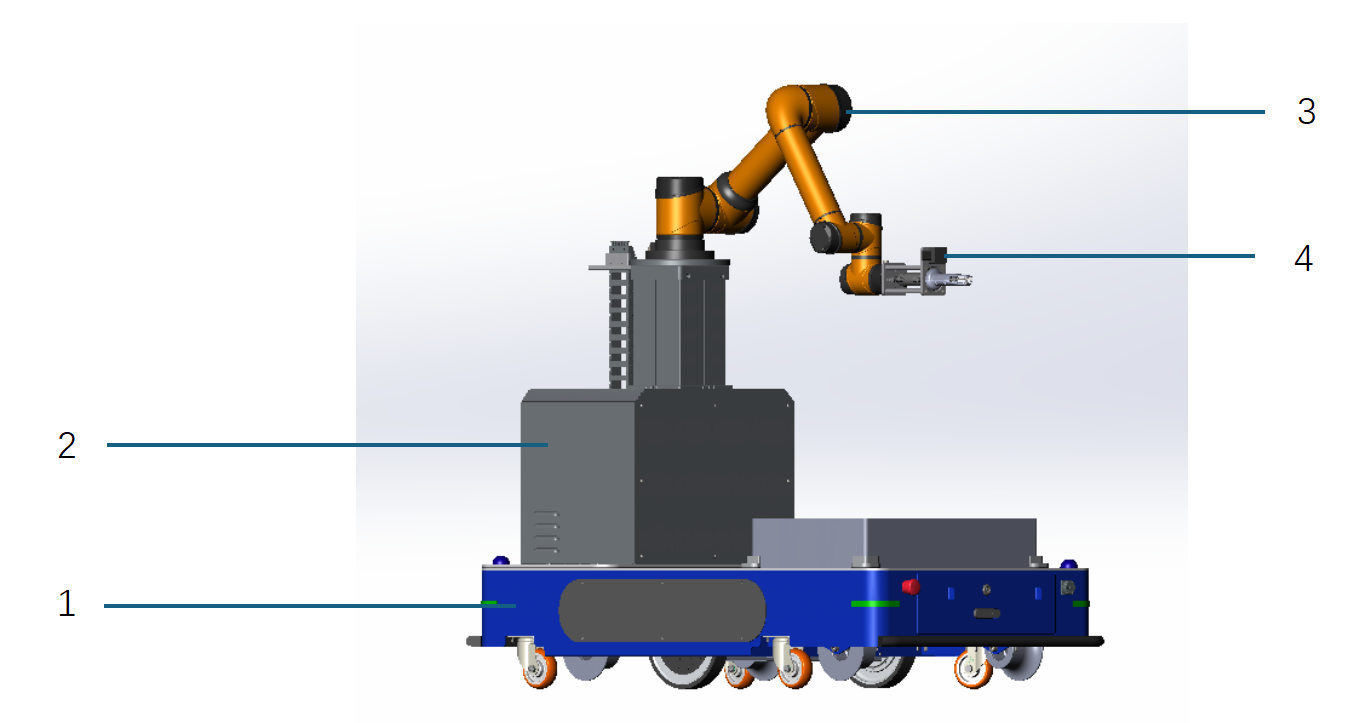
| 序号 | 按键及部件 | 描述 |
|---|---|---|
| 1 | 遨博协作机器人 | 遨博六轴协作机械臂 |
| 2 | 急停按钮 | 按下后可实现机器人的紧急停止,如需恢复至正常模式,需按照按钮上显示的方向旋转此按钮 |
| 3 | 氛围灯 | 用于显示机器人当前状态及电池电量 |
| 4 | 自动充电口 | 用于与自动充电器连接的接口 |
| 5 | 防撞触边 | 用于AGV碰撞防护 |
| 6 | 解闸开关 | 顺时针旋转解闸开关后,可手动推动AGV |
| 7 | 开/关机按钮 | 长按此按钮可开启或关闭AGV |
| 8 | 手动充电口 | 用于与手动充电器连接的接口 |
| 9 | 仓门钥匙口 | 用于打开AGV仓门 |
| 10 | 电池仓钥匙口 | 用于释放或锁住电池仓锁扣 |
| 11 | 电池仓拉手 | 用于电池的更换 |
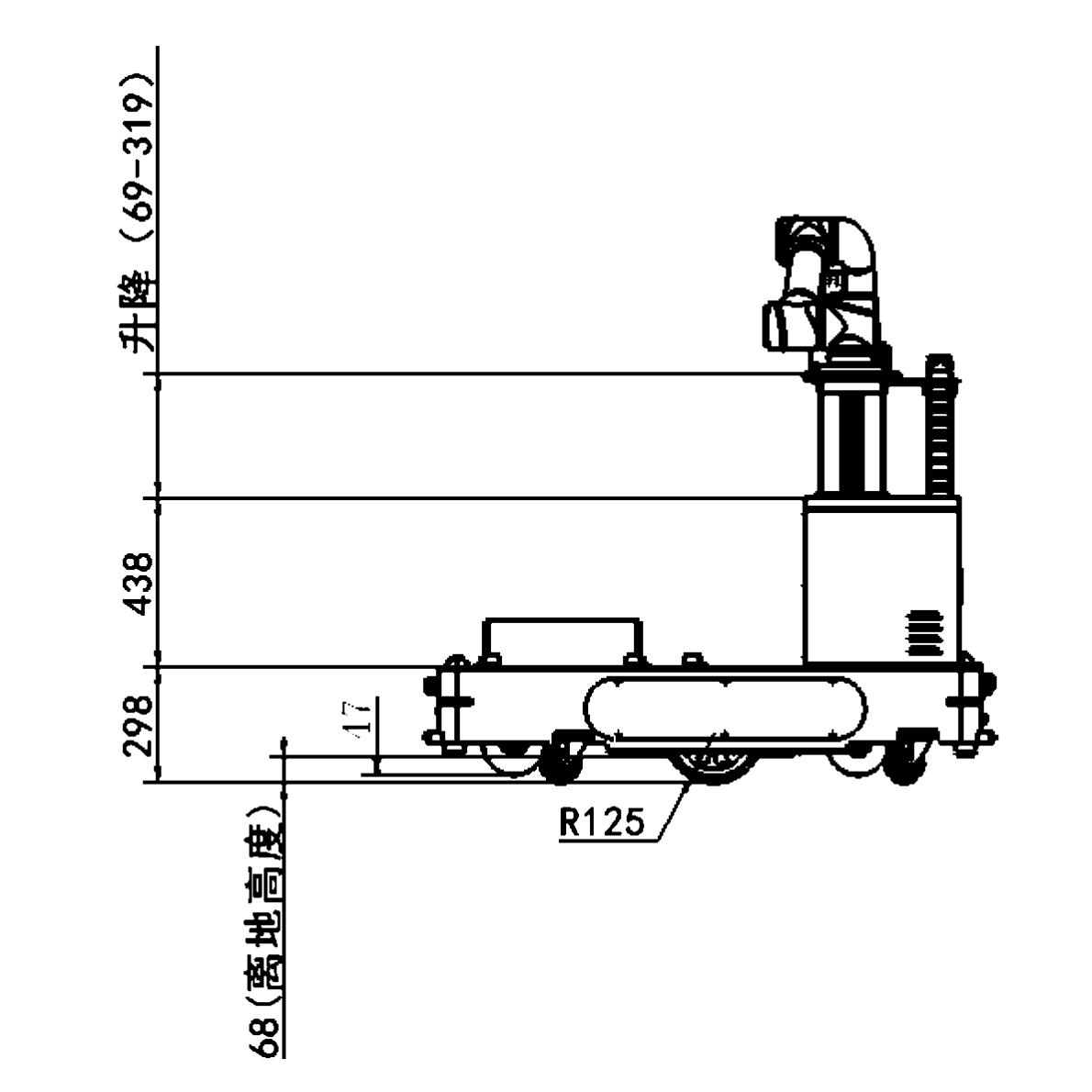
2.3 技术参数
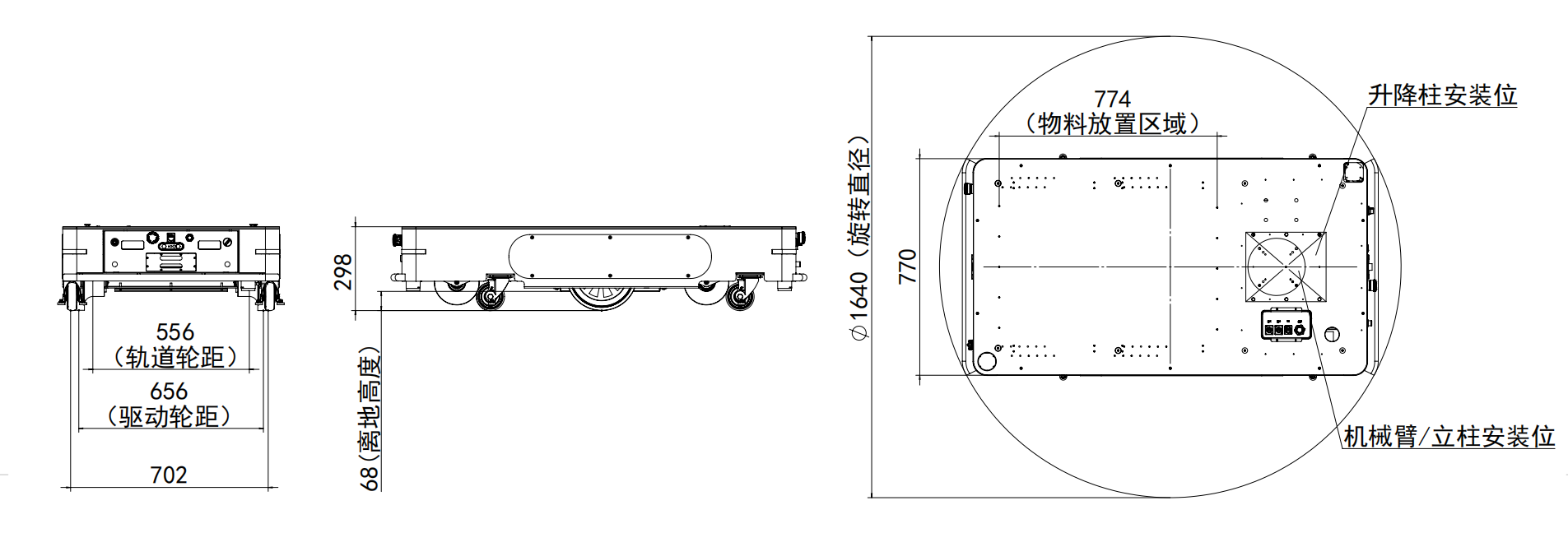
AGV 侧视图
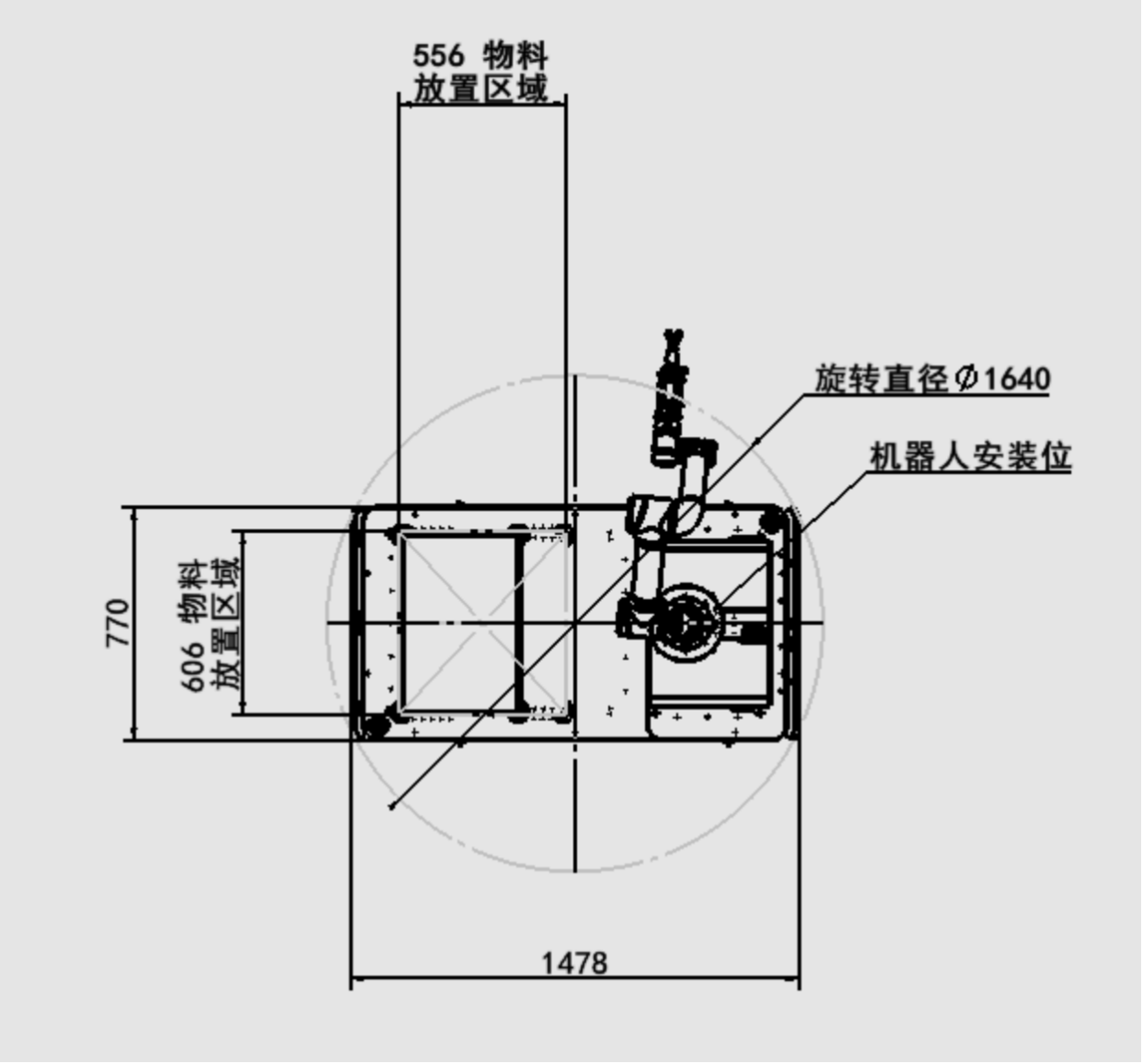
AGV 俯视图
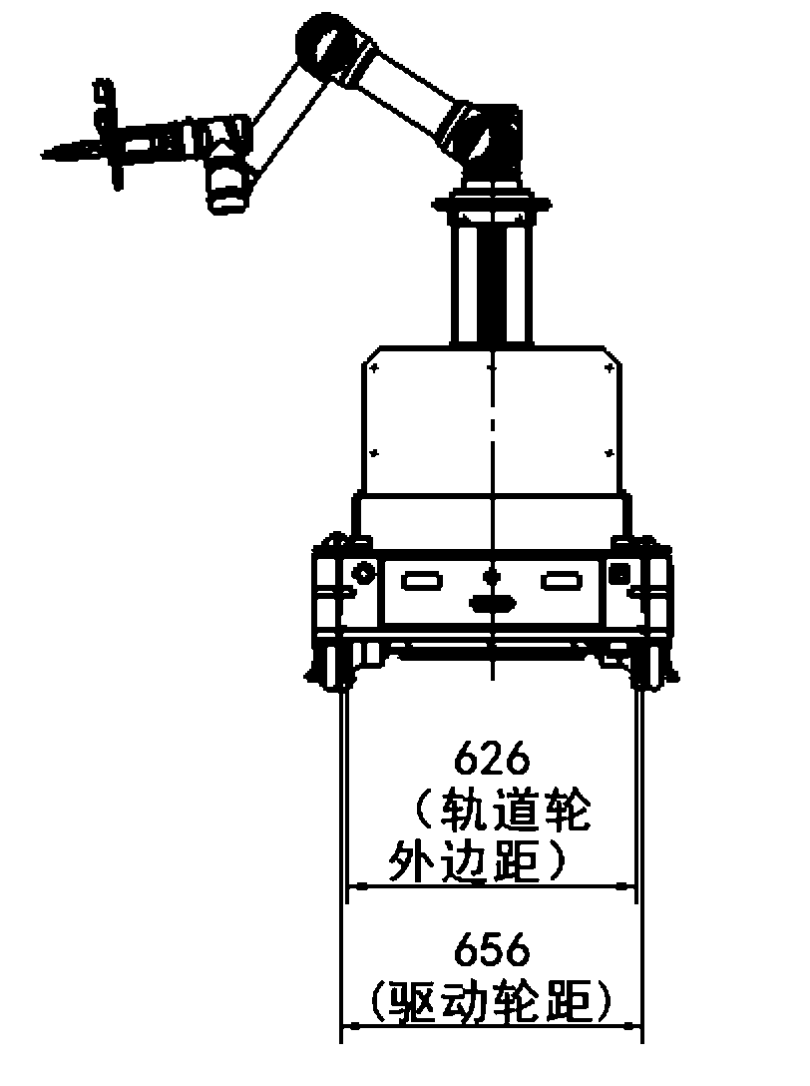
AGV 后视图
底盘结构示意图
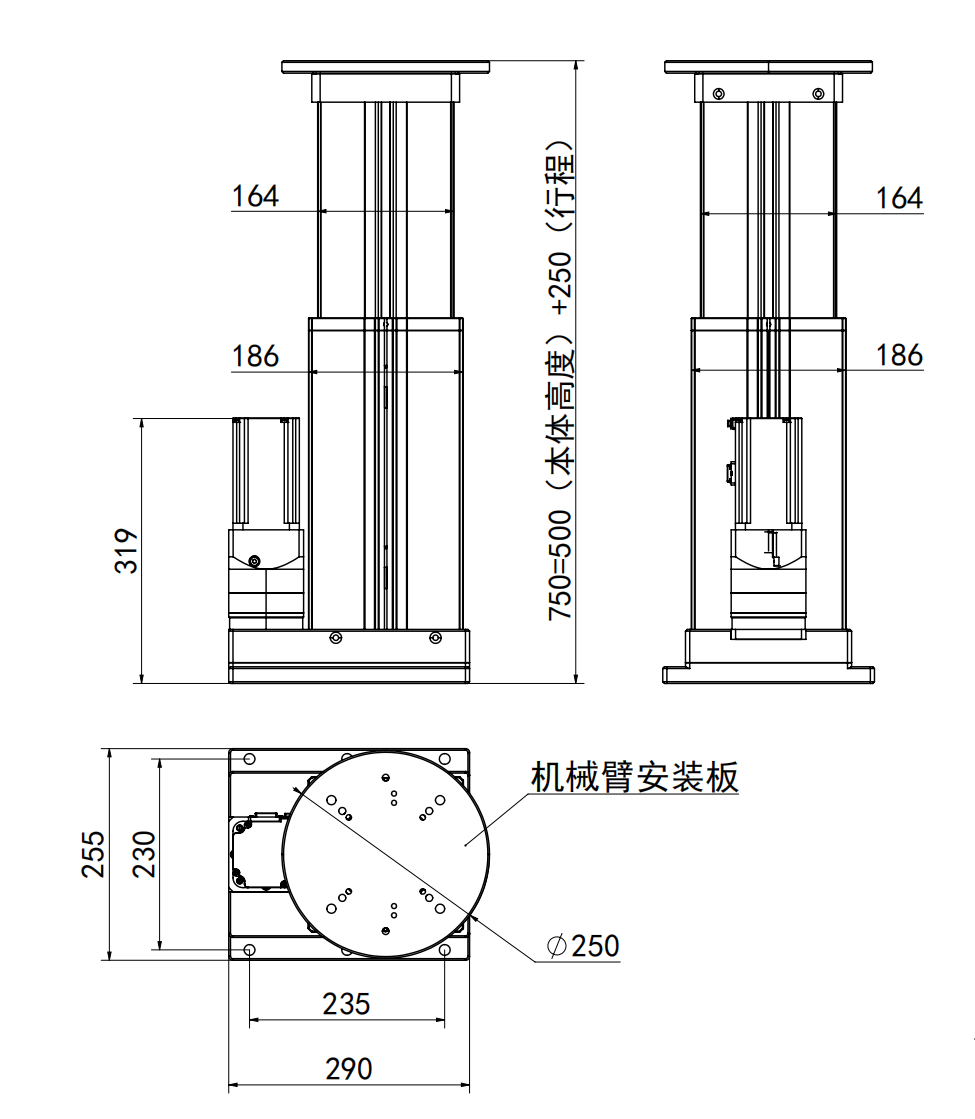
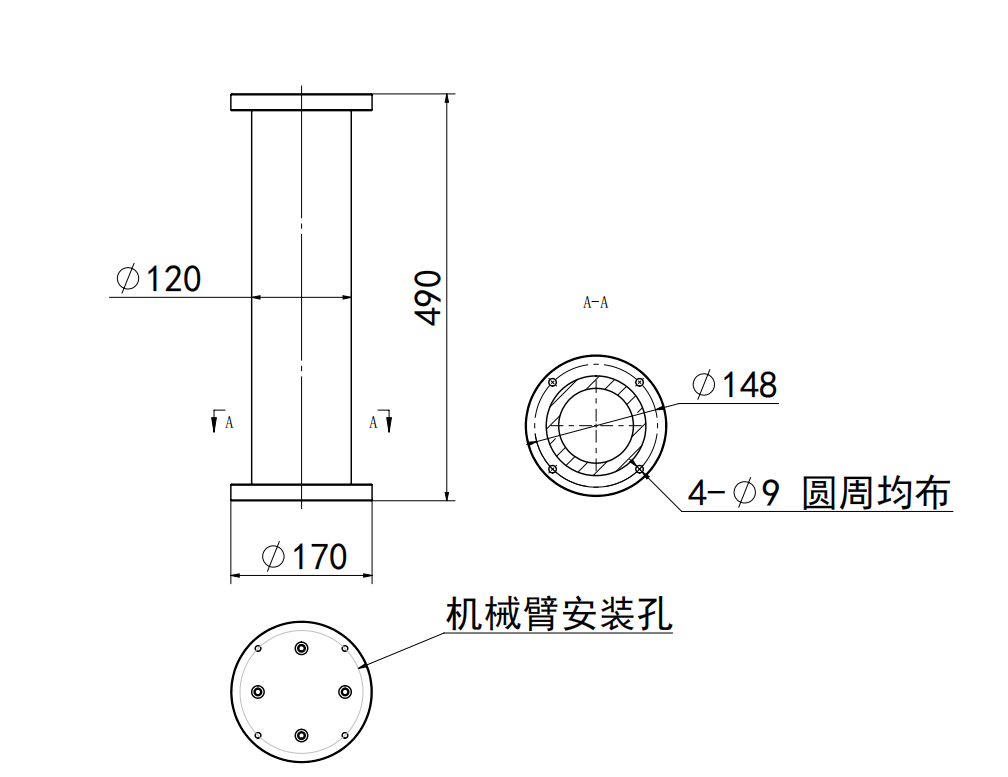
升降柱示意图
立柱示意图
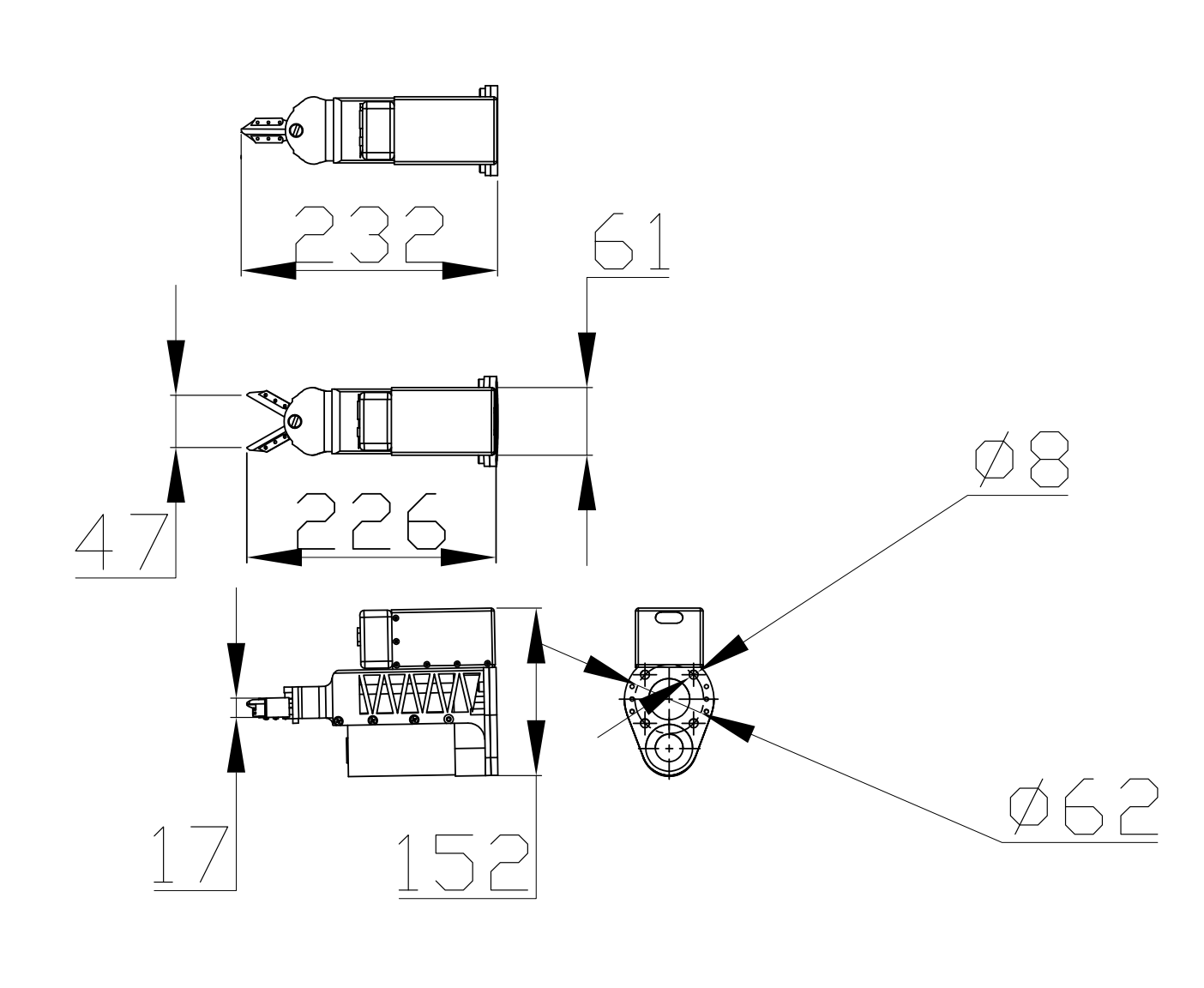
气动剪刀示意图
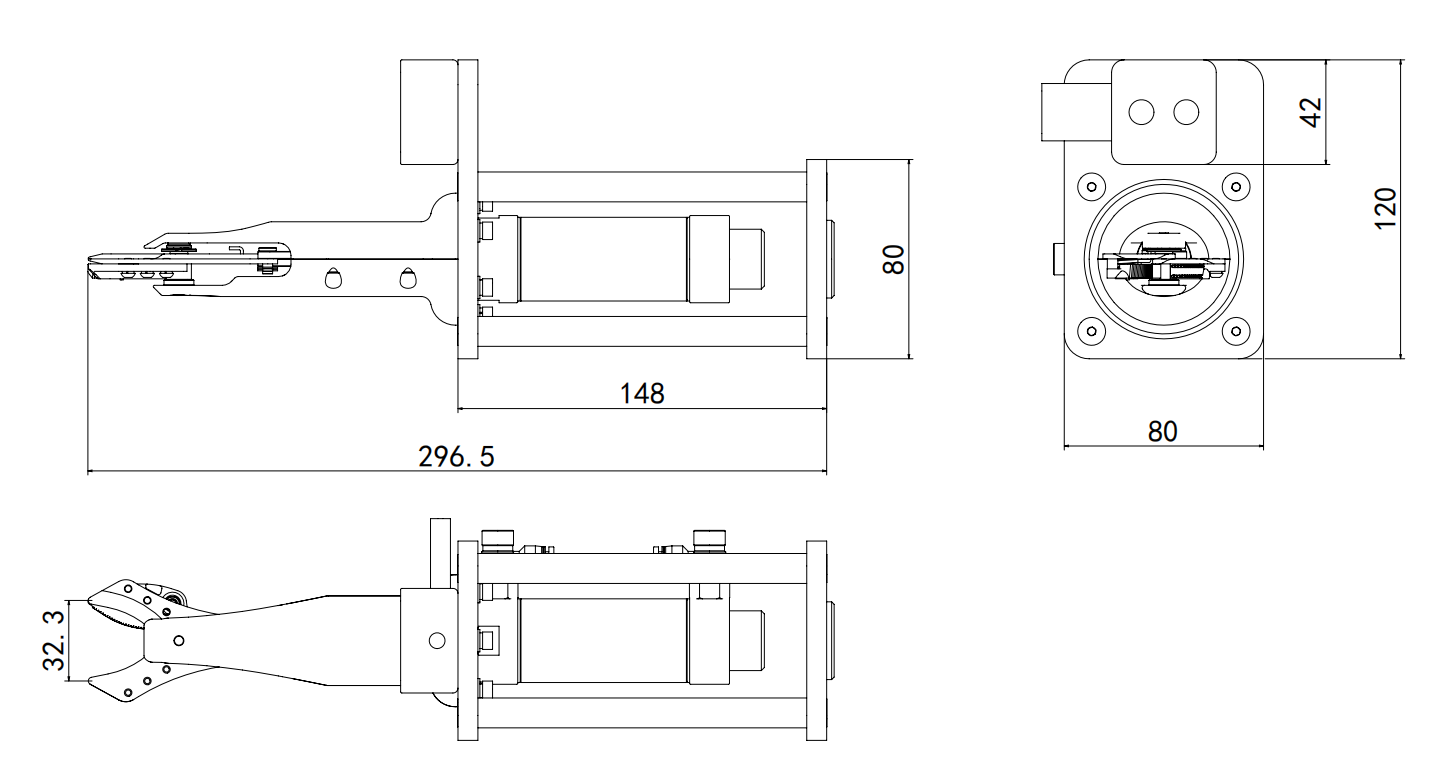
电动剪刀示意图
2.4 参数说明
| 参数名称 | 参数说明 |
|---|---|
| 产品型号 | FARM200 |
| 尺寸(长宽高 ) | 1478*770*298mm(不含二层和机械臂高度),公差±2mm |
| 负载表面尺寸(长*宽 ) | 606*556mm,公差±2mm |
| 自重 | 280Kg(不含机械臂) |
| 最大载重 | 200Kg(包含机械臂和载具重量) |
| 驱动形势 | 双轮差速驱动 |
| 激光传感器数量 | 2个 |
| 运动参数 | |
| 最大速度 | 1.5m/s |
| 工作速度 | 前进:1.0m/s(可配置),后退:1.0m/s(可配置) |
| 转弯半径 | 0mm |
| 旋转半径 | 820mm |
| 爬坡能力 | 小于15° |
| 离地间隙 | 68mm |
| 最大越障高度 | 50mm |
| 过缝最大距离 | 小于35mm |
| 站点定位精度 | ±10mm |
| 续航性能 | |
| 电池容量 | 48V 80Ah |
| 充电器供电参数 | AC220V |
| 续航时间 | ≥8h |
| 电池寿命 | 800次(DOD 100%),容量保持率80% |
| 充电方式 | 手动充电、手动换电、自动充电 |
| 充电时间 | 3h(从15%充电到95%) |
| 选配设备 | |
| 机械臂 | C系列 H系列 IS系列 3公斤 5公斤 7公斤 10公斤 |
| 视觉采摘系统 | 可识别串番茄,包括位置、成熟度信息, 识别成功率≥80%; 成熟度识别准确率≥80% |
| 末端执行机构 | 气动剪刀 电动剪刀 |
| 自动升降柱 | 本体高度:500mm 行程:250mm 速度:0-50mm/s 负载:1000N 信号类型:EtherCAT |
| 固定立柱 | 高度:490mm |
| 电池包 | 80AH 120AH |
| 自动充电桩 | AC220V |