遨博丰禾系列 Farm200 末端电动执行机构调试说明
番茄采摘机器人说明
1 剪刀式串番茄采摘机械手
| 参数名称 | 参数值 |
|---|---|
| 型号 | SC-TT-01 |
| 采摘形式 | 剪夹一体式采摘 |
| 控制接口形式 | 12V IO |
| 尺寸 | 200x40*120mm |
| 重量 | 950g |
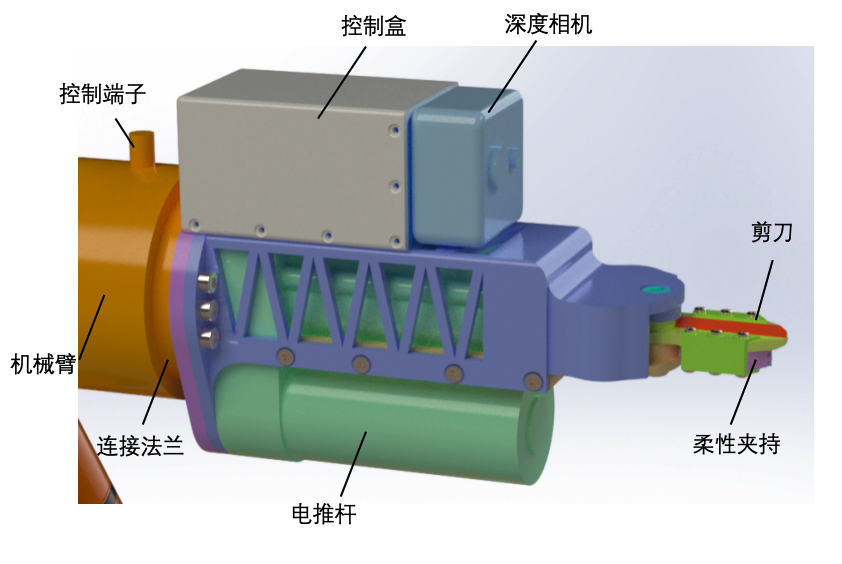
1.1 机械手结构
机械手结构组成如图所示:
1.2 采摘机械手安装
机械手安装示意图:
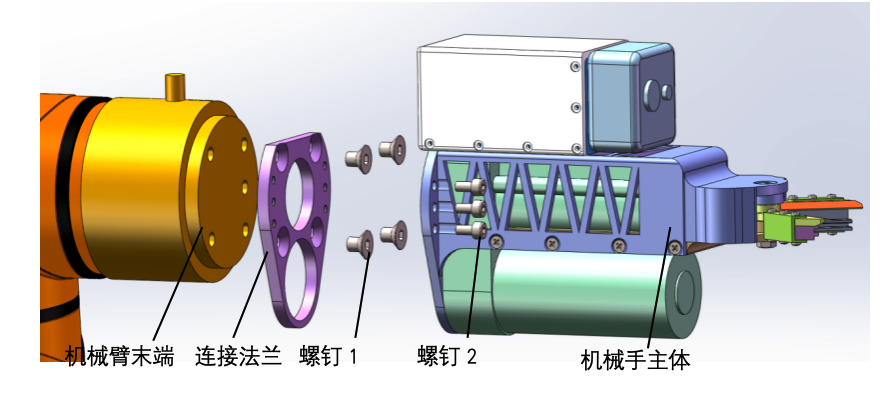
- 步骤 1:用螺钉 1(4 个,沉头 M6x10)将连接法兰固定到机械臂末端;
- 步骤 2:用螺钉 2(6 个,内六角 M4x8)将机械手主体固定至连接法兰。
1.3 机械手接线
采摘机械手预留 2 根 2 芯电缆,1 根带航空接头线。
- 电缆 1 为换筐信号 Tool3 GND,连接换筐装置控制器;
- 电缆 2 为供电,标号分别为 24V+,24V-,接入小车 24VDC 电源;
- 航空接头线插入机械臂控制端子(凸凹防错插孔,对正插入,避免硬插)
2 串番茄视觉机械手伺服系统
可识别串番茄,包括位置、成熟度信息,可视觉伺服控制番茄采摘机械手完成自动采摘。
2.1 变压模块
设置有 2 个 DC-DC 变压器模块,分别为 48VDC-12VDC;48VDC-19VDC。
- 48VDC-12VDC 降压模块为工控机触摸屏供电;
- 48VDC-19VDC 降压模块为工控机主机供电。
两个降压模块供电端并联并接入小车 48VDC 电源。
2.2 硬件连接
- 工控机电源连接:连接工控机电源线(48VCD-19VCD 降压模块),变压模块输入端连接 agv 小车 48V 电源接口,输出端为工控机电源线连接至工控机。
- 屏幕连接:连接屏幕电源线(48VDC-12VDC 降压模块),变压模块输入端与工控机为同一端口,输出端连接至屏幕即可。新款屏幕电源由工控机提供,只需将 USB Tpye-C 线连接至工控机即可。屏幕需要使用 HDMI 线连接至工控机,屏幕具有触摸功能,使用触摸功能时须使用数据线连接屏幕和工控机。
- WiFi 连接:使用 wifi 连接时,将工控机连接 agv 小车的 wifi。
- 网线连接:使用网线连接时将网线插入 agv 小车网口即可。
- 相机连接:使用相机数据线将相机和工控机连接。
2.3 控制流程
2.3.1 启动 agv 小车
长按 agv 小车至开关电源上灯光变绿,松开电源,等待至 agv 小车周围灯光停止闪烁,agv 电机上电成功。
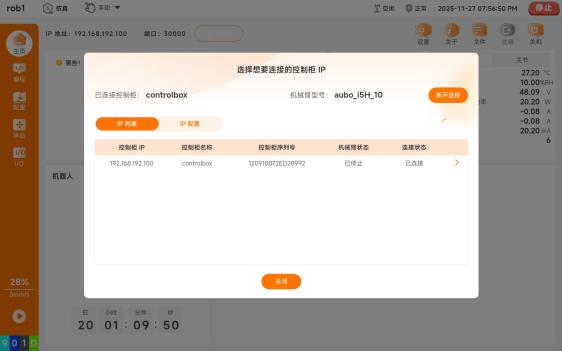
2.3.2 启动机械臂
Agv 上电成功后,示教平板连接 agv WiFi,打开遨博 STUDIO。选择要连接的机械臂,连接成功后点击关闭,在机械臂的主页面上有上电按键,点击上电,后点击继续(点击继续后须等待片刻),最后点击启动按钮,机械臂发出上电声响,页面跳转,机械臂启动成功。
机械臂启动流程:



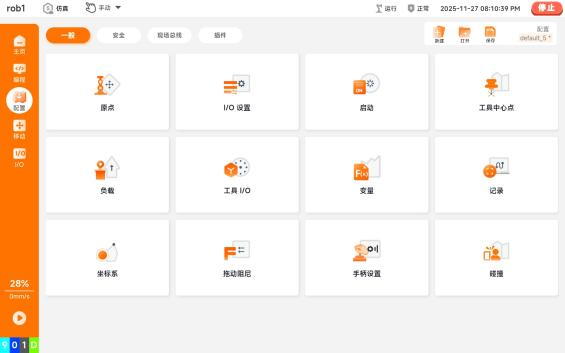
2.3.3 机械臂设置
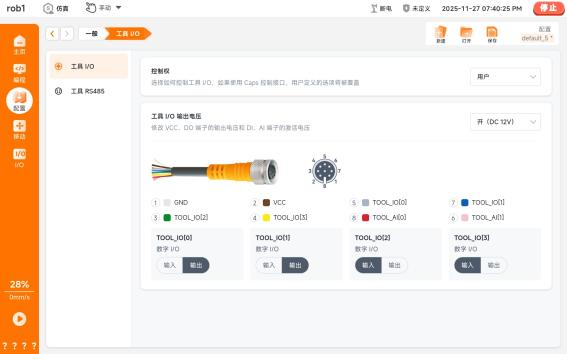
步骤一:页面左侧栏中选中配置,点击工具/IO。将工具/IO 页面的标注处改为开(DC12V),下方标注处将 TOOL_0、TOOL_1 改为输出模式(若有换框装置需将 TOOL_2 改为输出模式),点击右上角保存,再次启动机械臂时此步骤可省略。
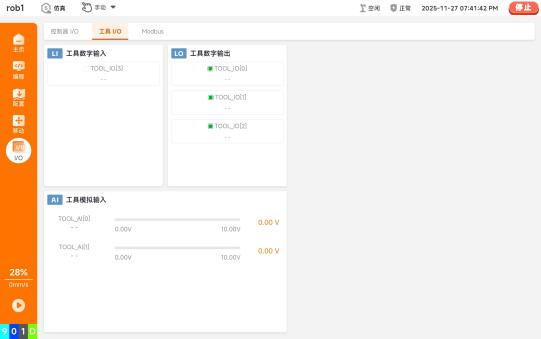
步骤二:页面左侧栏中选中 I/O,在页面中选中工具 I/O,将工具数字输出全部勾选(若无换框装置工具数字输出只有 TOOL_0、TOOL_1,此时只勾选这两个即可),此步骤每次启动机械臂后均需设置。
机械臂配置流程:
2.3.4 采摘控制
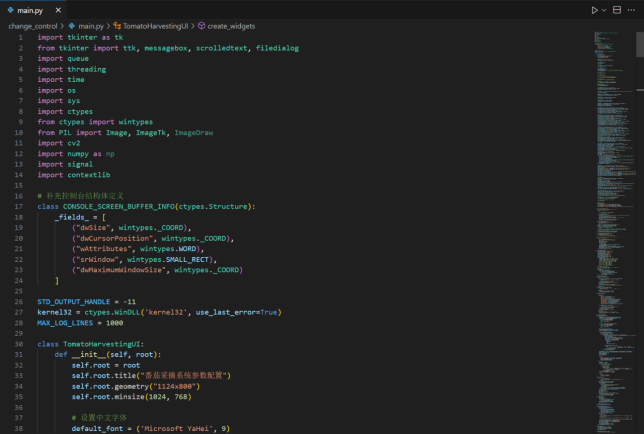
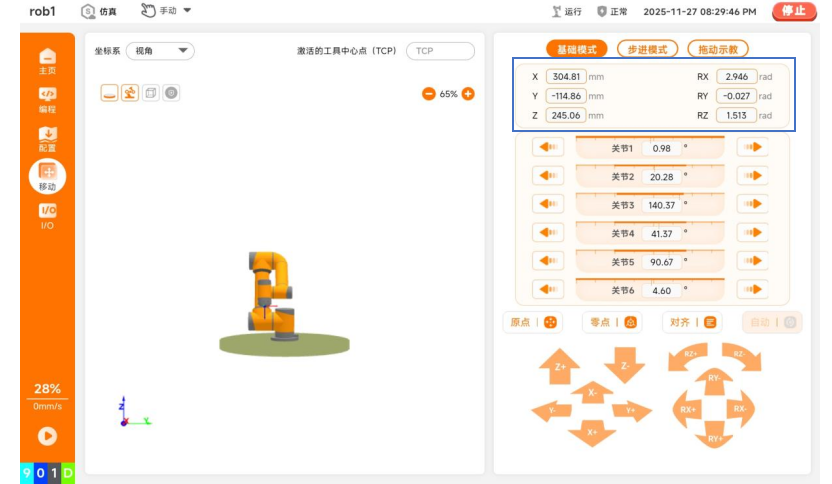
启动程序前将机械臂关节角设置为 [0.0939, 0.6383, 2.2089, 1.5708, 1.5708, 0]。用 VS code 软件打开 robot_control 文件夹,运行(点击图示中的右上角标注出的播放按键)main.py 文件,运行后操作界面自动弹出。点击启动程序,弹出参数保存成功界面后点击确定,程序开始运行。到达总时长后程序自动停止,如若关闭程序直接关闭操作界面。操作界面中进行的参数修改不会被保存,下次启动后重置为原来的参数,需要在 main 的参数部分进行修改。
操作界面

操作界面如图,界面左侧为系统参数配置部分,分别为机械臂配置、agv 配置和放置位姿的设置;界面右侧为相机画面和日志,未执行程序时相机画面为串番茄图片,程序执行时切换至相机画面。
2.3.5 参数修改
参数部分图:
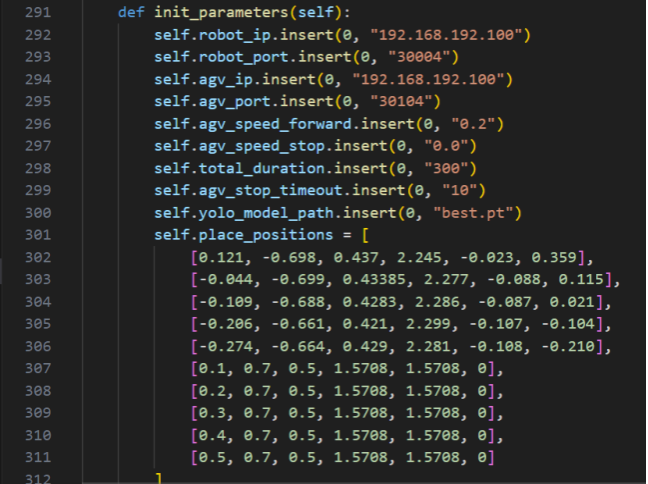
如图所示,根据实际情况修改 main.py 代码中的相关参数,由上到下分别为机械臂 ip、机械臂端口、agv ip、agv 端口、agv 行进速度(±分别代表正反方向)、agv 停止速度、运行总时长、检测停止时长(可不用修改)、视觉模型文件(无需修改)、番茄放置位姿(X、Y、Z、RX、RY、RZ)。修改番茄放置位姿时,拖动机械臂,使机械臂末端到指定的放置番茄的位置(位置信息改为下图标注处),确定要到达位姿后修改 main 代码中的番茄放置位姿部分。
3 自动换筐装置
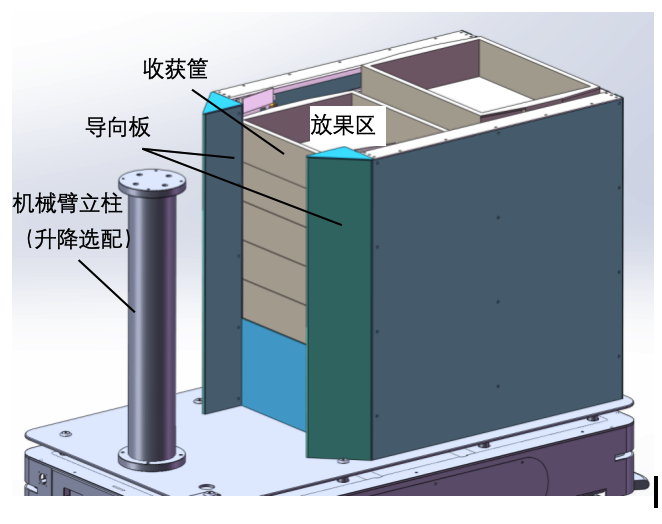
番茄采摘机器人可选自动换筐装置配件,机械手有序向收获筐放果,每筐放一定数量果实后换筐装置自动更换空筐,直至所有收获筐全部放满,返回卸货区,更换空筐,延长采摘机器人连续自主作业时间,提升采摘效率。换筐装置上下等宽设计,宽度小于底盘车宽度,前方设置有导向板,防止刮藤。换筐装置侧面嵌有工控机触摸屏,美观且方便操作,自动换筐装置基本参数如表所示。
| 基本性能 | 参数 |
|---|---|
| 最大装筐数量(可定制) | 10筐 |
| 收获筐尺寸(长宽高) | 530380110mm |
| 换筐速度 | <15s |
| 换筐装置尺寸(长宽高) | 853666803 |
| 功率 | <100W |
换筐装置结构图:
番茄采摘机器人整机图:
