Appearance
拖动示教
拖动示教模式下,用户可以手动将机器人拉伸到目标位姿。如果机器人的位姿接近关节极限或安全平面,机器人会产生排斥力。
当机器人进入拖动示教模式时,界面顶部状态栏出现 “拖动示教” 的提示。
如何进入拖动示教模式?
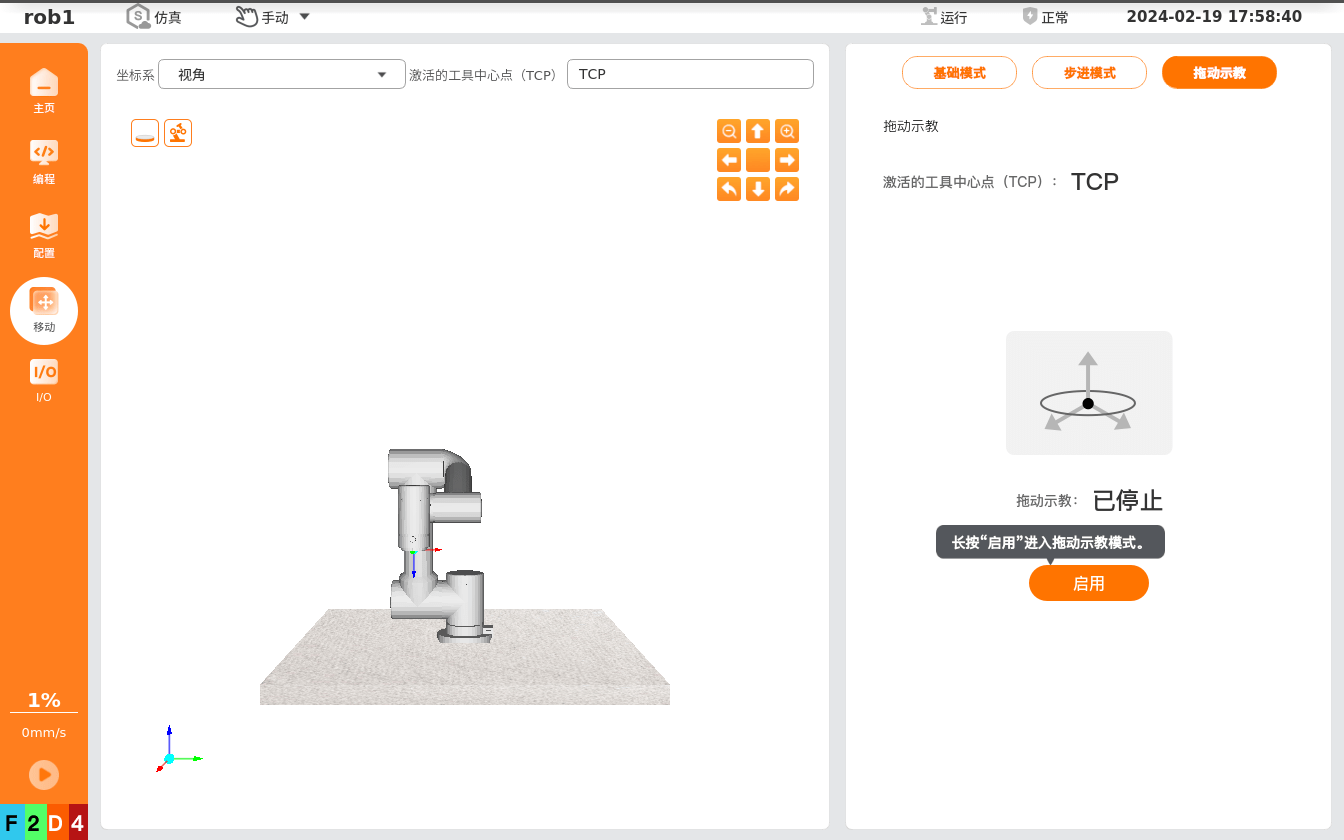
【移动】界面
用户可通过 “移动 > 拖动示教” 进入【拖动示教】界面,长按【启用】按钮至图标变为彩色,进入拖动示教模式,即可拖动机器人到目标位姿。单击【禁用】按钮至图标变为灰色,退出拖动示教模式,机器人保持位姿。
I/O 动作
用户设置 I/O 后,当该 I/O 接收到有效信号时即可进入拖动示教模式,拖动机器人到目标位姿,该 I/O 口的有效信号消失后即退出拖动示教模式。I/O 部分的设置操作请参见 “5.1.2 I/O 设置”。
示教器按钮
用户按住示教器上的按钮,进入拖动示教模式,即可拖动机器人到目标位姿。松开按钮,退出拖动示教模式,机器人保持位姿。该功能可通过 “配置 > 安全 > 三档位开关” 进行设置,具体请参见 “5.2.5 三档位开关”。

机械臂末端按钮*
用户可按住机械臂末端的拖动示教按钮,进入拖动示教模式,即可拖动机器人到目标位姿。松开按钮,退出拖动示教模式,机器人保持位姿。
提示
仅部分型号机械臂末端装有拖动示教按钮,具体请参见硬件用户手册。