Appearance
什么是程序?
程序是一组机器人能识别和执行的指令,通过编写程序操控机器人,实现其在特定应用中的运动和控制需求。在 AUBO SCOPE 中,用户可以使用系统提供的【编程】界面编写程序,也可以使用系统提供的接口编写脚本。本小节将介绍使用【编程】界面进行编程的方法,有关脚本的使用方法请参见 “4.5.1 脚本”。
【编程】界面的程序由程序块和程序节点组成,程序块由多个程序节点组合而成,旨在方便管理代码。机器人移动的路径由一系列路点完成,这些路点可以通过示教或【命令】中的配置项设置。用户可以自行创建并编写程序,控制机器人的移动和 I/O 信号的发出与接收,也可以通过设置变量来运行 如果……否则……、循环 等命令。
第一个程序
下面演示一个简单的程序,通过该程序介绍如何在 AUBO SCOPE 中编写程序,该示例程序能够使机器人在两个路点间来回移动。
在【编程】界面,单击程序管理工具栏的【新建】,新建一个程序文件。

在【基础】选项卡下单击【移动】
 ,向程序树中添加【移动】节点。然后单击【路点】
,向程序树中添加【移动】节点。然后单击【路点】 ,向程序树中添加【路点】节点。此时程序中有一个【移动】节点,【移动】节点下有【路点_0】和【路点_1】两个路点。
,向程序树中添加【路点】节点。此时程序中有一个【移动】节点,【移动】节点下有【路点_0】和【路点_1】两个路点。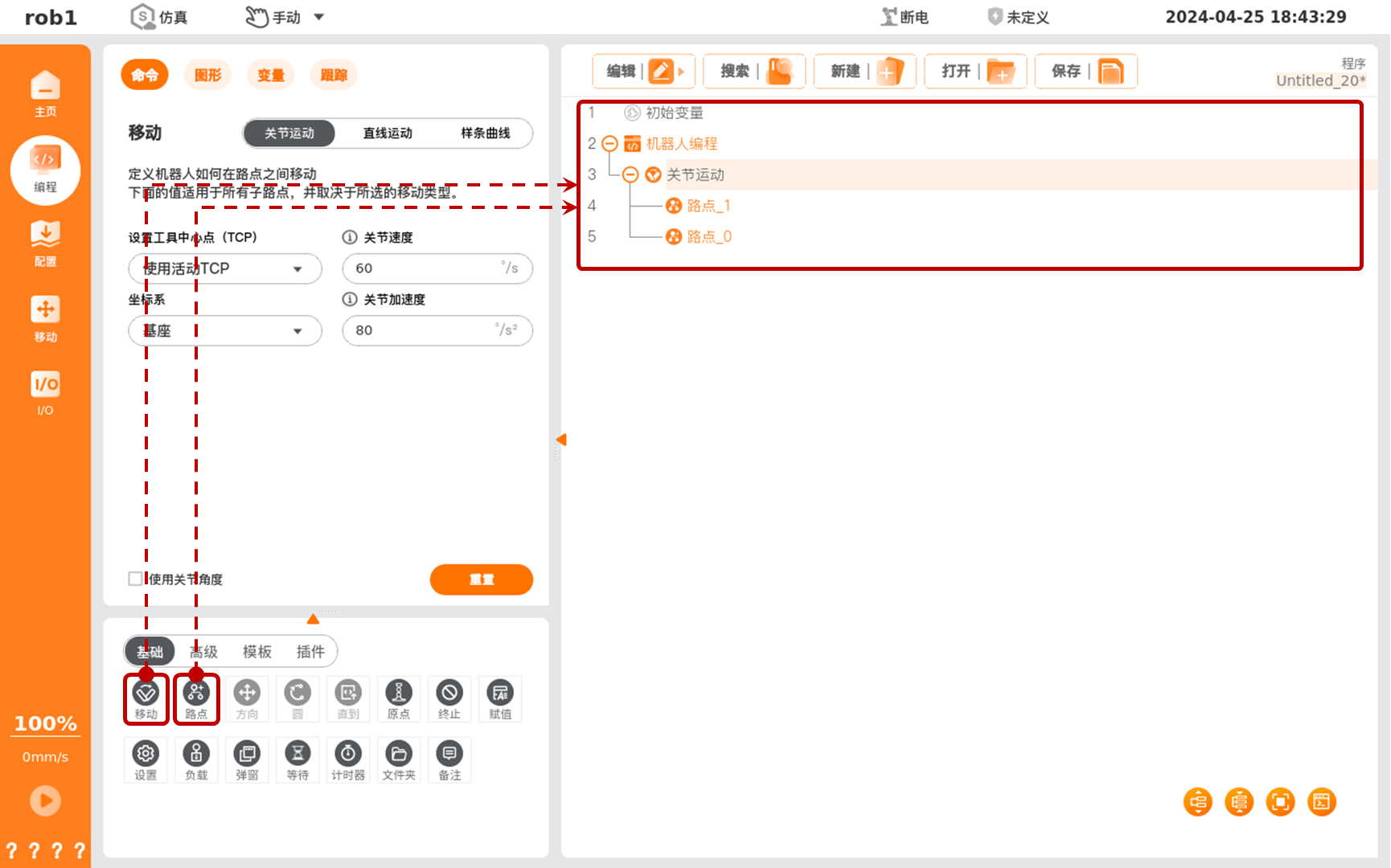
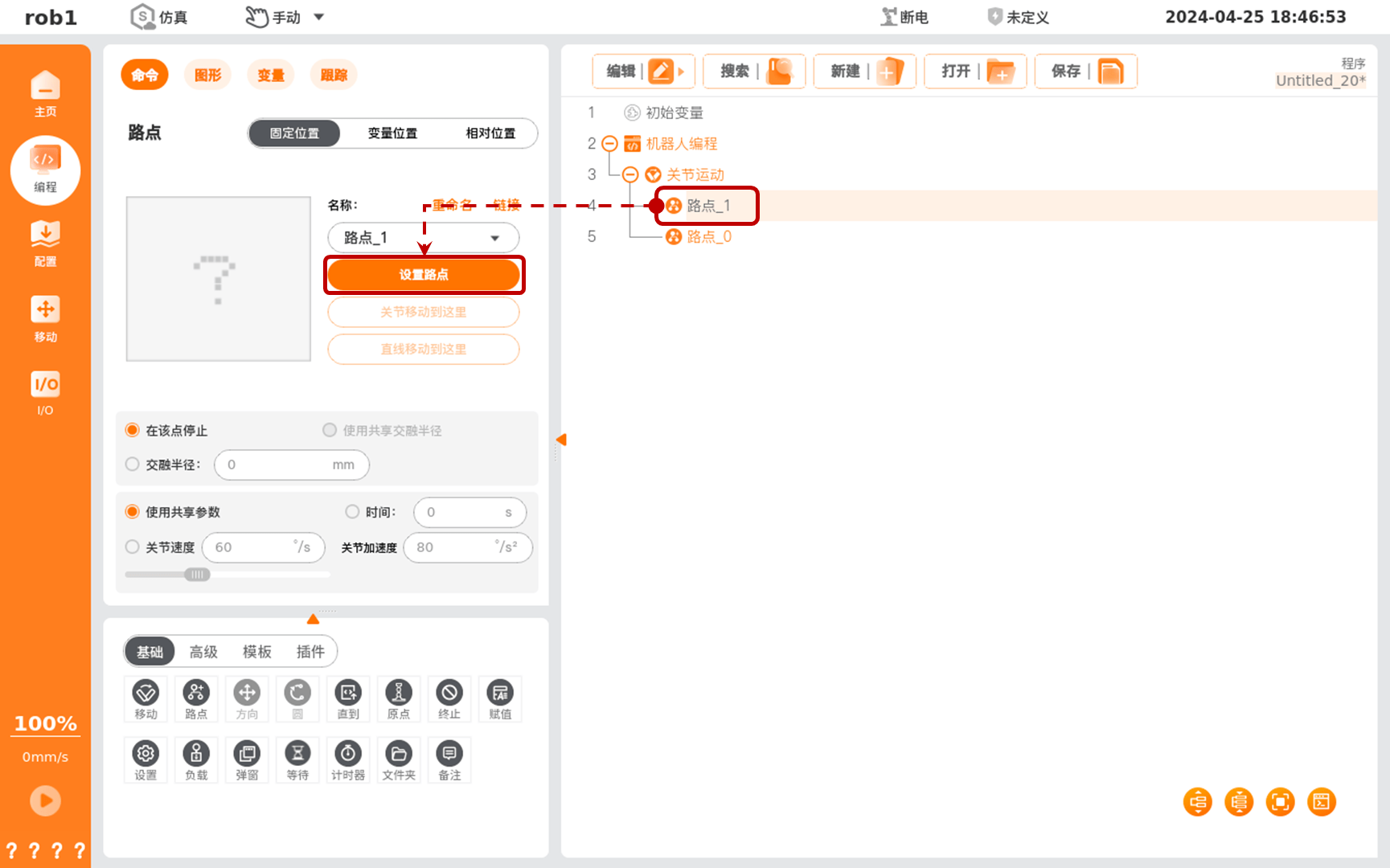
单击【路点_1】,在【命令】选项卡下,单击【设置路点】按钮,进入【移动】界面。
用户可以选择【基础模式】或【步进模式】,通过【位置/姿态控制】按钮移动机器人至目标位置。确定位置后,单击【确定】退出【移动】界面,完成【路点_1】的位姿设置。
在移动机械臂前,请单击左侧菜单栏的【速度】按钮,拖动【速度调节条】的滑块调节机械臂的运动速度。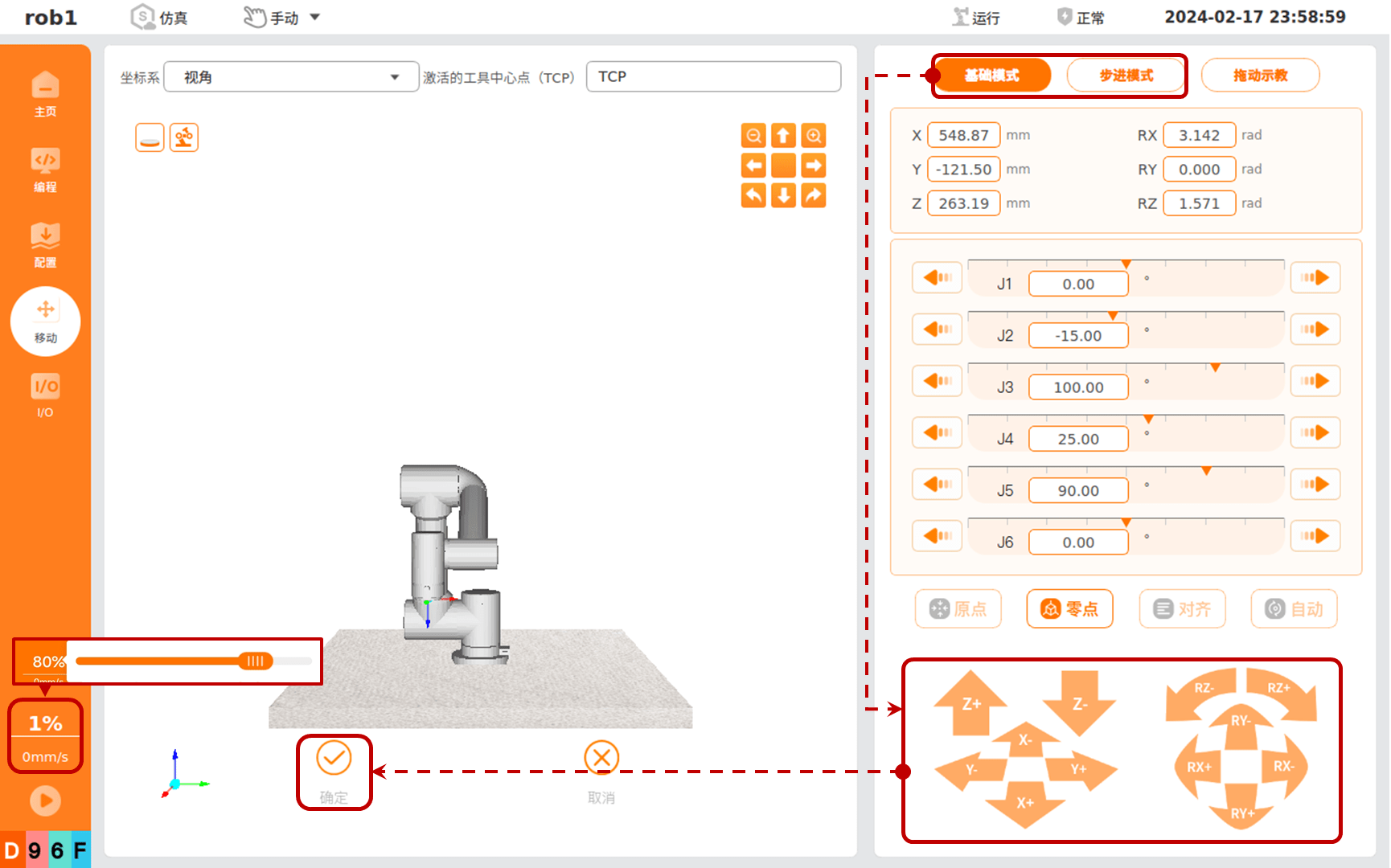
重复步骤 3 ~ 4 的操作给【路点_0】赋值。
单击左侧菜单栏的【速度】按钮弹出【速度调节条】,拖动滑块调整速度。
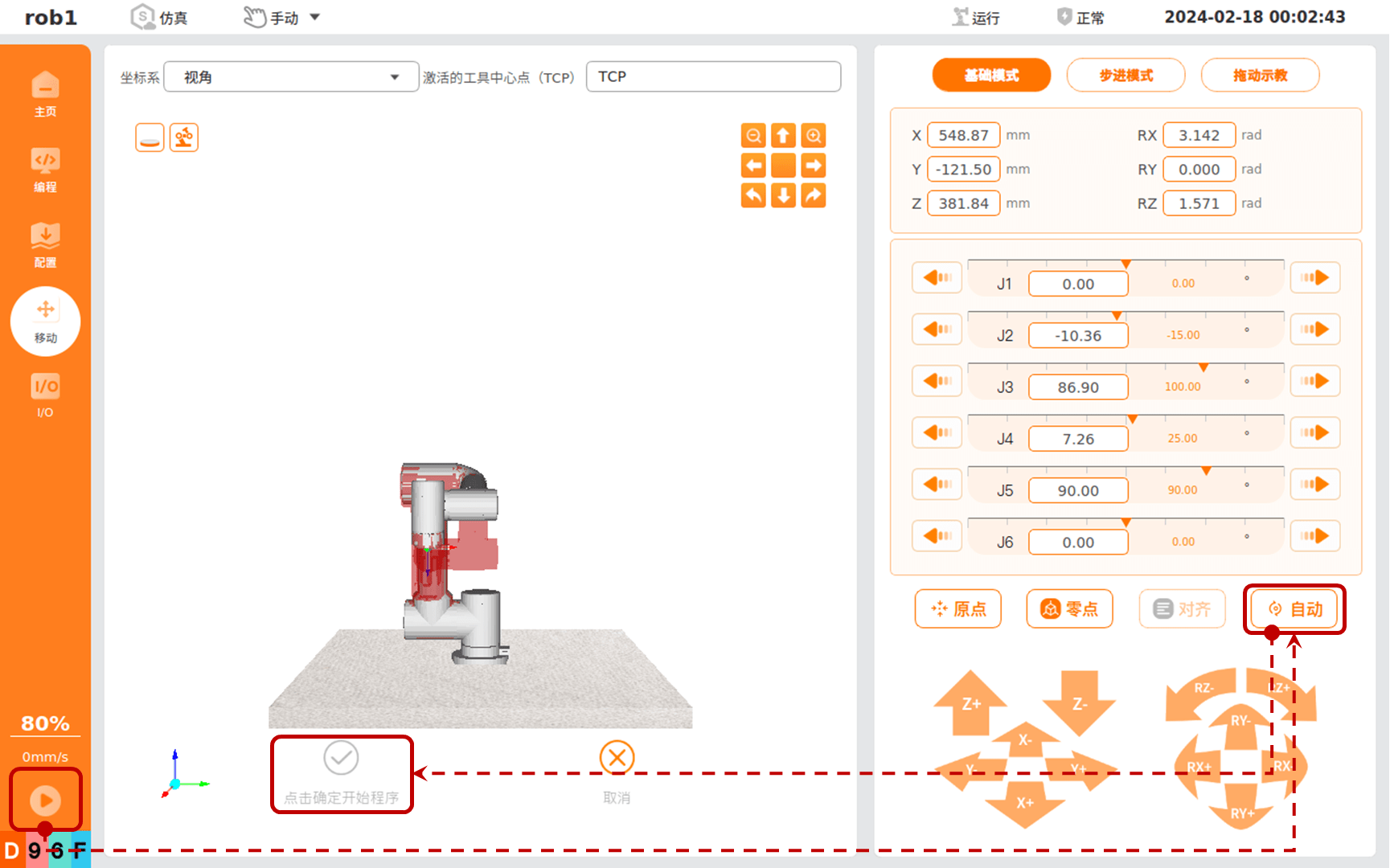
单击左侧菜单栏的【运行】按钮,选择【从起始点运行程序】,进入【移动】界面,长按【自动】至按钮置灰,即移动机械臂到程序初始位姿,此时【点击确定开始程序】按钮使能,单击即可运行程序,机器人在【路点_0】和【路点_1】之间移动。
恭喜完成第一个机器人程序!该程序可以实现机器人在【路点_0】和【路点_1】两个路点之间移动。