快速入门
用户手册
进行中活动
Appearance
拖动示教模式下,可以手动拖动机器人。
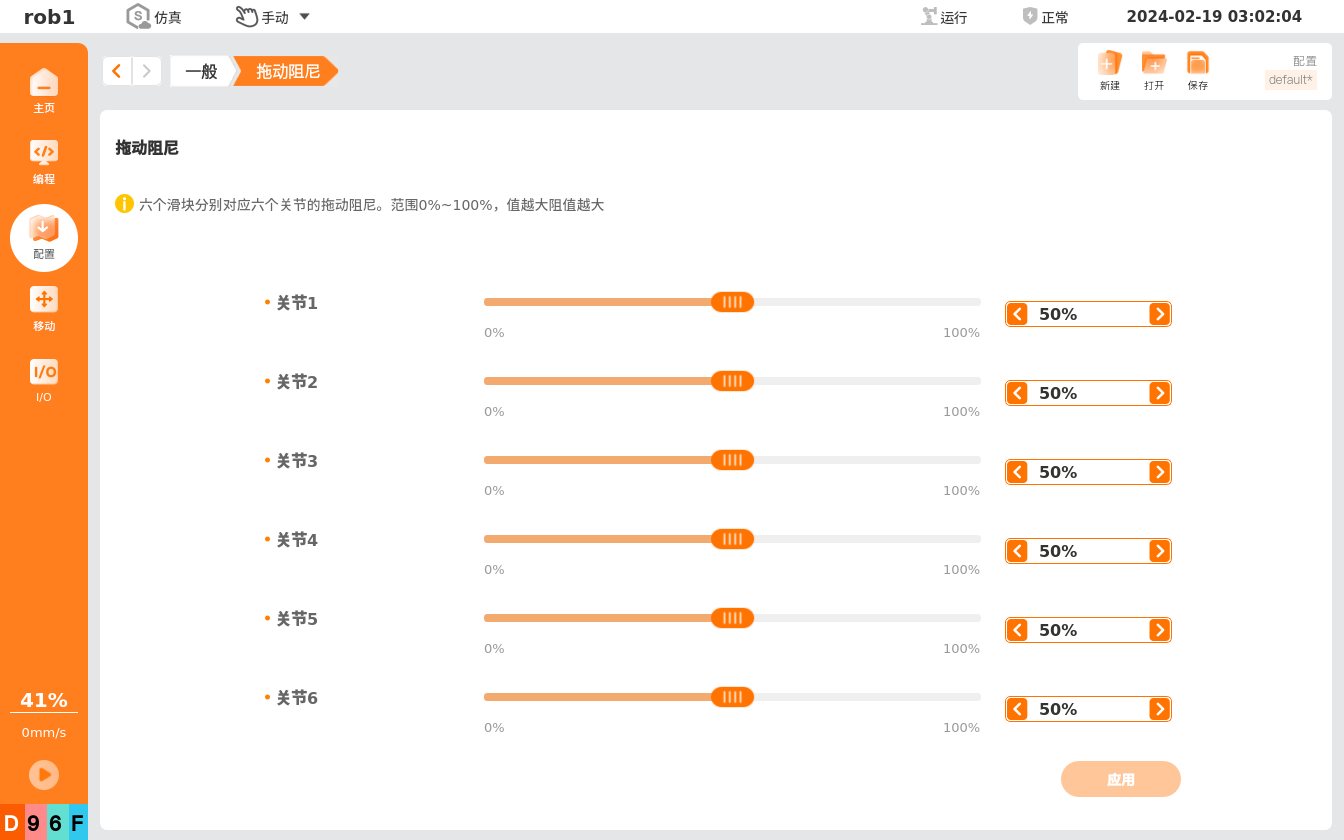
【拖动阻尼】可以设置在拖动机器人各个关节时所需的力。设置的值越大,拖动关节时需的力越大。
提示
参数设置后,必须单击右上角的【保存】按钮才能保存参数。单击【应用】按钮或机器人重新上电,只能使设置的参数生效,不能保存参数。