Appearance
操作模式
AUBO SCOPE 提供手动、自动、联动、本地四种模式,通过【状态栏】的【模式切换】![]() /
/![]() /
/![]() 按钮切换。
按钮切换。
用户需先设置操作模式密码,才可通过【模式切换】按钮切换模式,操作模式密码的设置请参见 “8.2.1 经典模式”。
| 手动模式 | 自动模式 | 联动模式 | 本地模式 | |
| 拖动示教 | √ | √ | ||
| 【移动】功能 | √ | √ | ||
| 【配置】功能 | √ | √ | ||
| 【编程】功能 | √ | √ | ||
| 执行程序 | √ | √ | √ | |
| 通过 I/O 执行程序 | √ |
模式之间的切换逻辑如下:
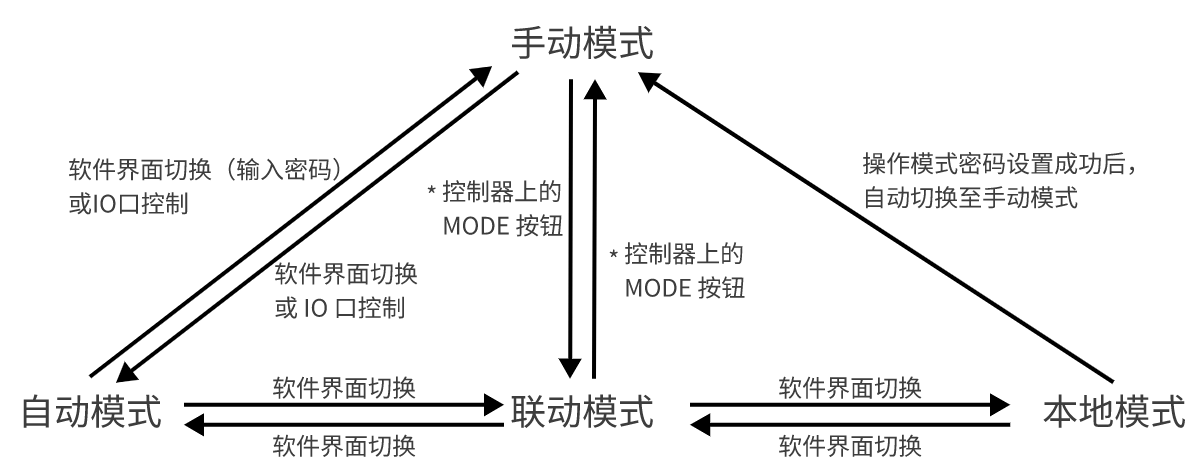
*:该功能仅部分型号控制器支持,具体请参见硬件手册。
2.3.1 手动模式
手动模式下,用户可以使用软件的所有功能,无法通过 I/O 控制机器人执行程序。该模式通常适用于一台机器人的工作场景。
2.3.2 自动模式
自动模式下,用户不可对程序、安装配置文件等功能进行编辑设置,也不可移动机械臂,即不可使用【编程】、【配置】、【移动】等功能,机器人只能执行定义好的程序工程。
2.3.3 联动模式
联动模式下,用户不可对程序、安装配置文件等功能进行编辑设置,也不可移动机械臂,即不可使用【编程】、【配置】、【移动】等功能,用户可通过 I/O 对程序进行控制。联动模式须在自动模式下进入。
2.3.4 本地模式
当系统未配置操作模式的安全输入 I/O,且没有设置操作模式切换密码时,将进入本地模式。
权限为高级模式时无本地模式。