Appearance
安全限制
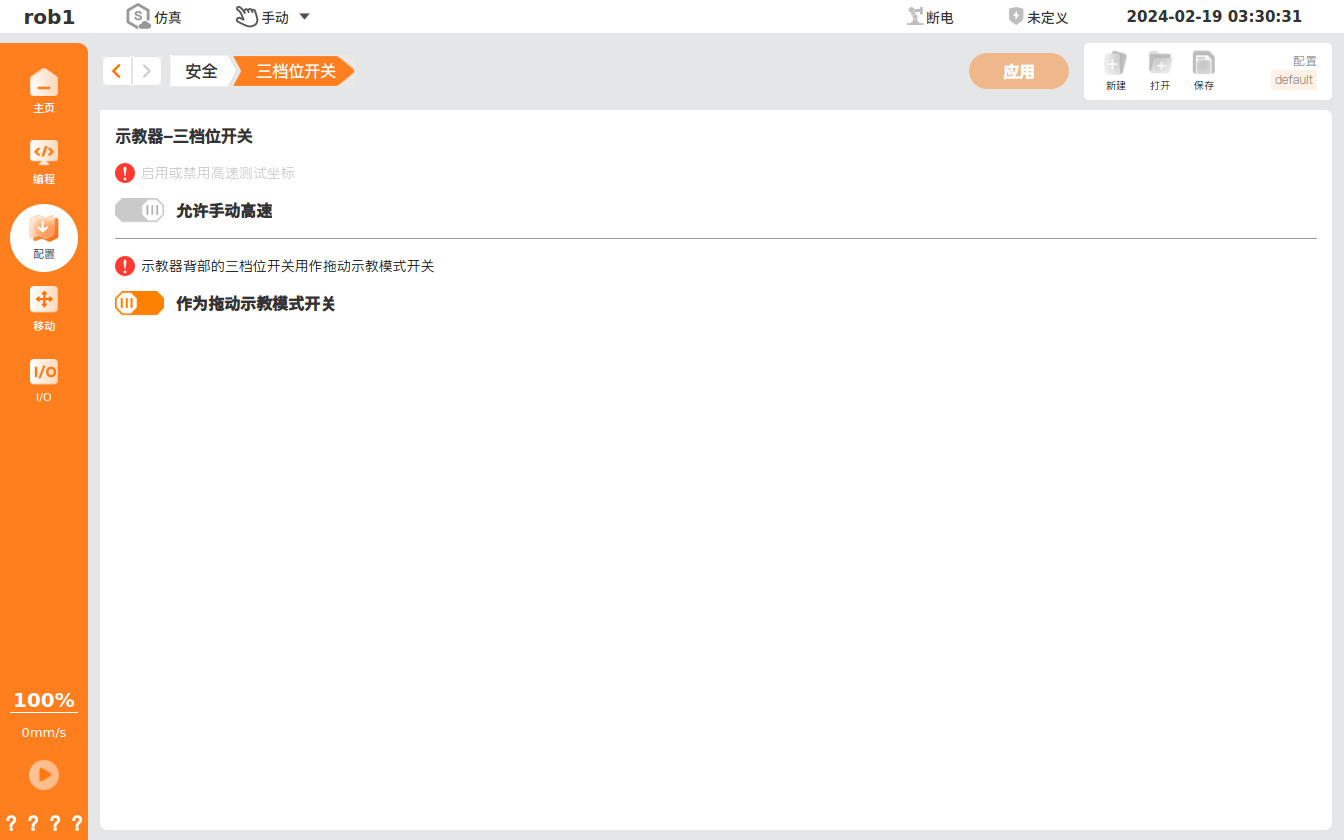
三档位开关
【三档位开关】界面可设置三档位开关的功能。
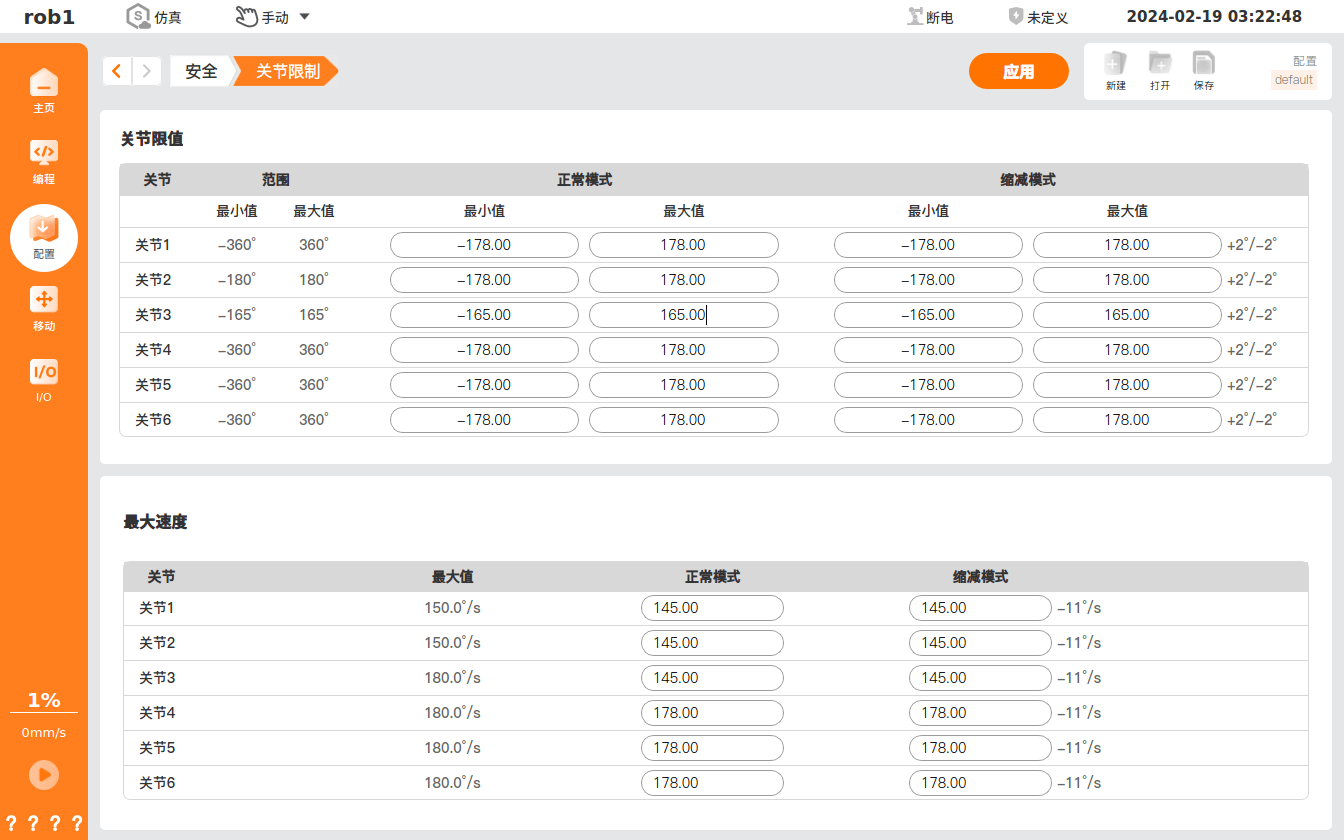
关节限制
【关节限制】界面可以设置机械臂各关节能到达的最大限制,限制机械臂各关节在关节空间的移动。在该界面中,用户可以设置 “正常模式” 或 “缩减模式” 下每个关节的旋转角度、关节最大速度限制。
- 同时设置 “缩减模式” 和 “正常模式” 时,“缩减模式” 内数值不可大于 “正常模式”,否则系统将提示不可保存。
- 关节最大值、关节最小值、关节最大速度限制默认值就是最大范围,用户只能在默认范围内进行修改。
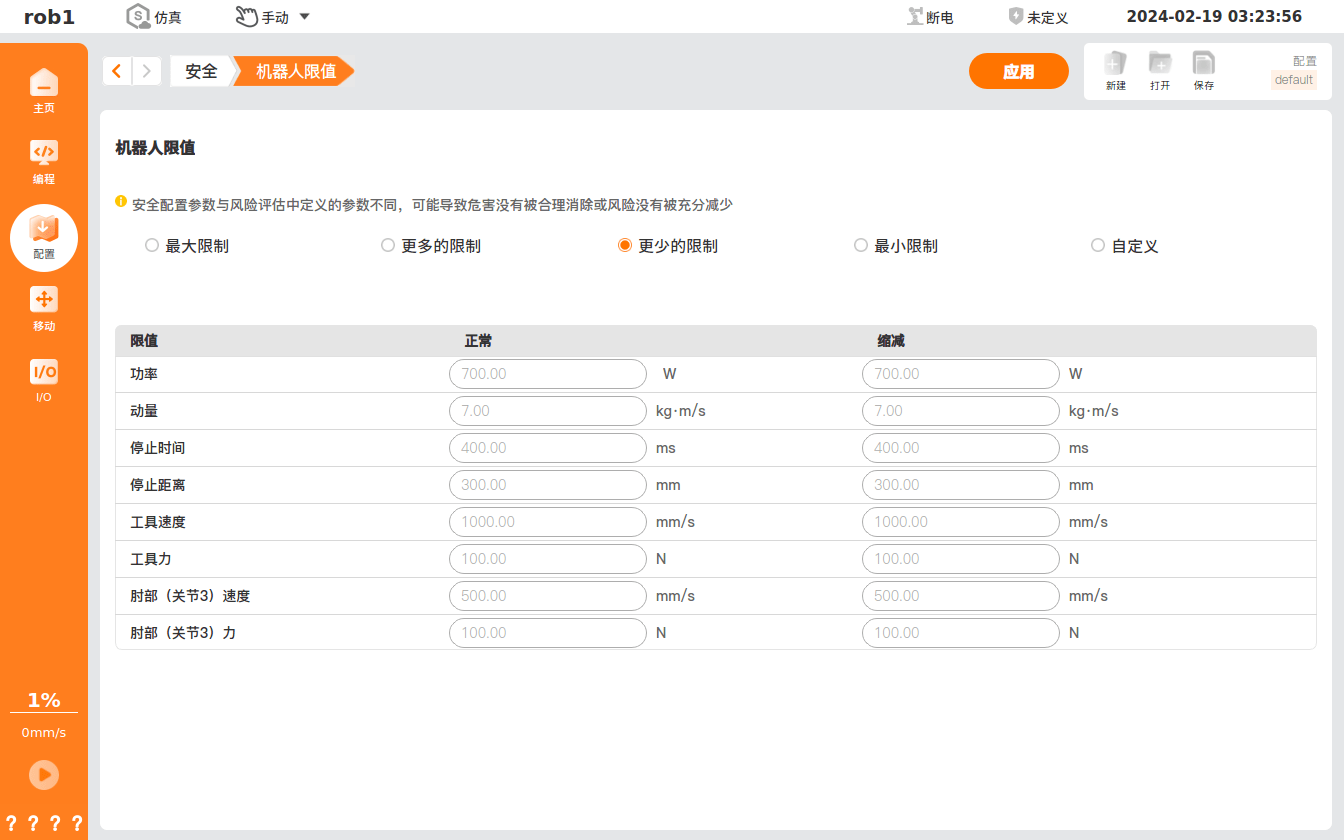
机器人限值
【机器人限值】可以设置限制机器人硬件参数,包括功率、动量、停止时间、停止距离、工具速度、工具力、肘部(关节 3)速度和肘部(关节 3)力。系统提供了几种预设值,用户也可按需进行自定义设置。但安全配置参数与风险评估中定义的参数不同,可能导致危害没有被合理消除或风险没有被充分减少。
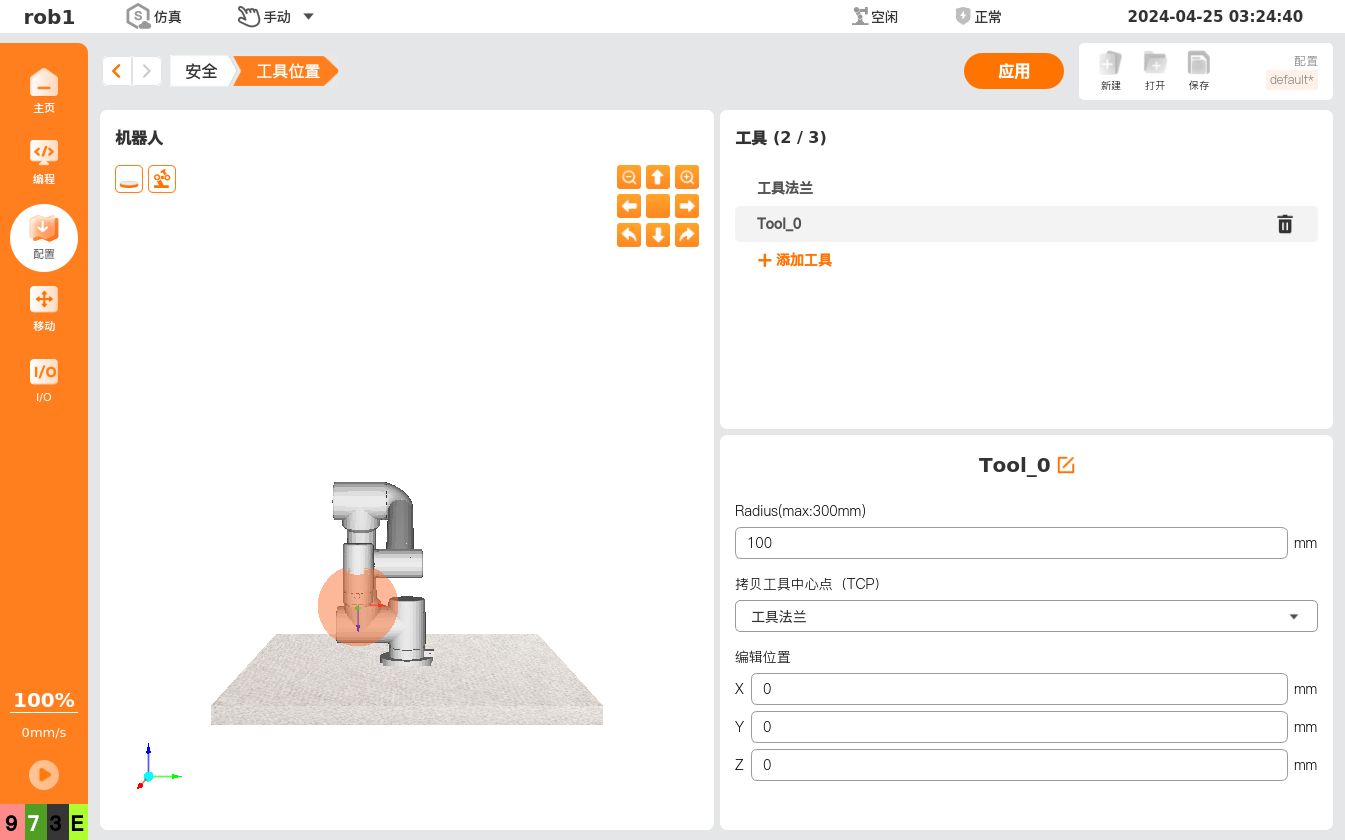
工具位置
【工具位置】界面可设置末端工具的球形包络,通过球形包络模拟工具的形状。该功能旨在保护末端工具,在 TCP 接近安全平面或障碍物时,利用球形包络监测碰撞,从而保护末端工具的完整性。
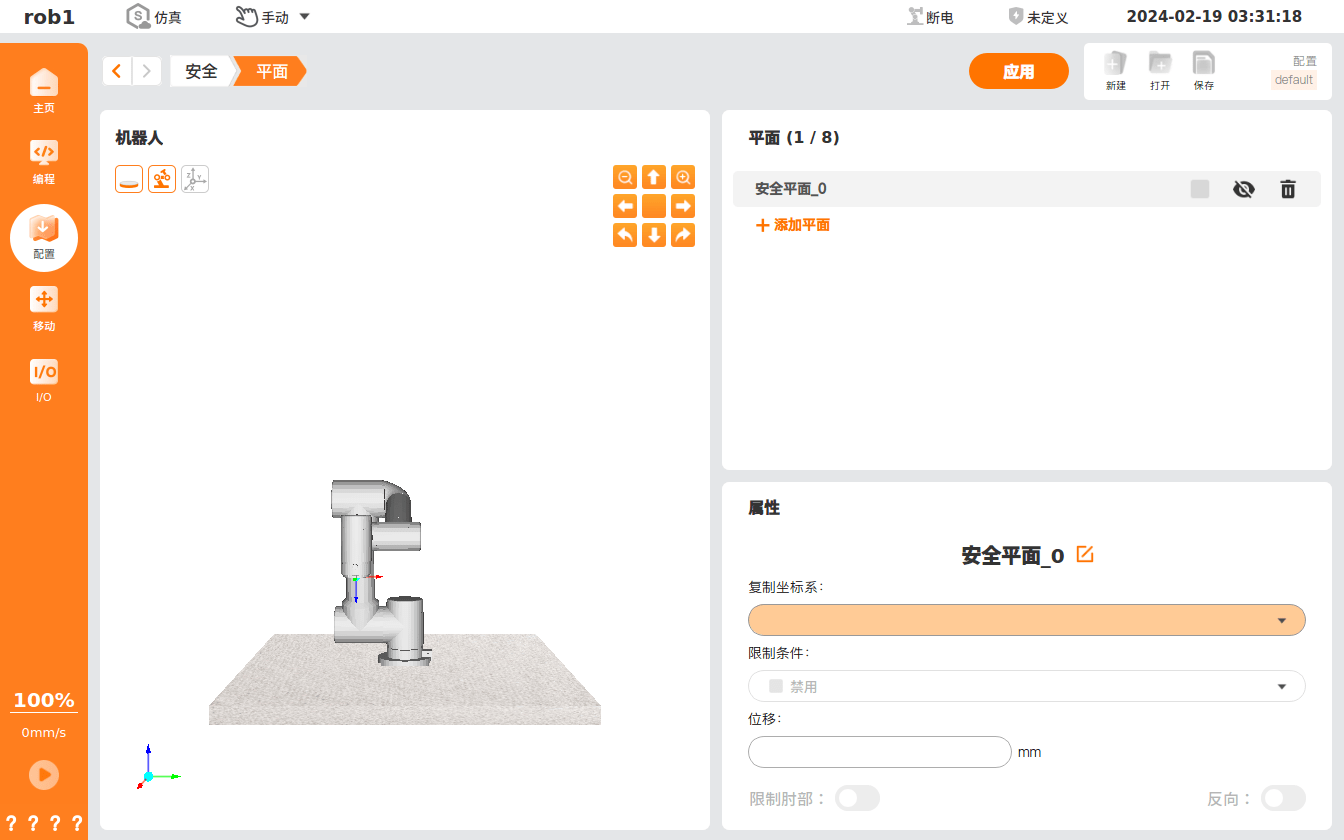
平面
【平面】界面可以设置安全平面。
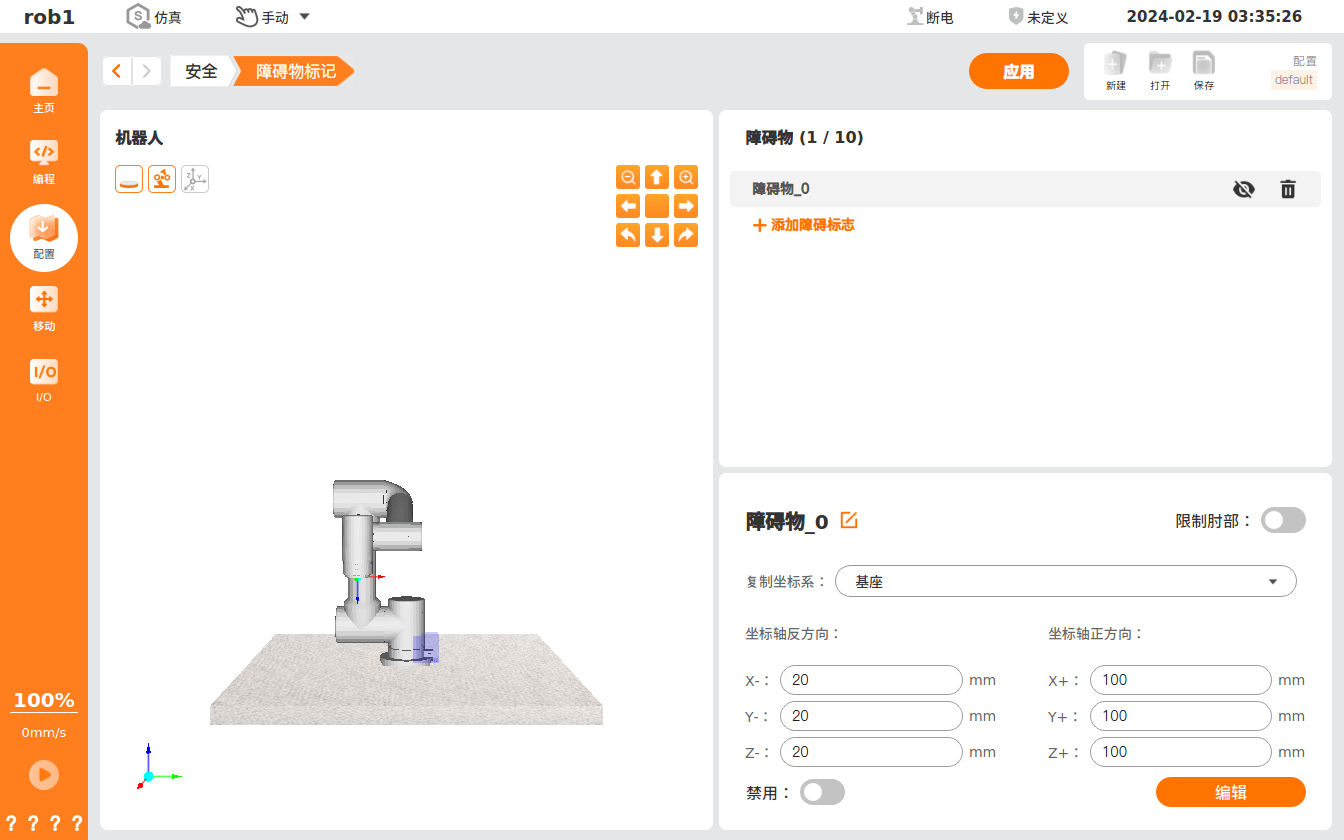
障碍物标记
【障碍物标记】界面可以标记障碍物所在的立体空间。