Skip to content
AUBO Developer
Search
K
Main Navigation
了解ARCS
用户手册
快速入门
有线示教快速入门
APP 快速入门
用户手册
软件用户手册
硬件用户手册
焊接工艺包使用手册
开发
开发环境
API 参考
LUA 脚本编程
AuboCaps 开发指导
应用笔记
资讯
进行中活动
🏅第一届 遨博应用开发大赛
支持
培训中心
下载中心
遨博论坛
反馈与建议
Appearance
Menu
Return to top
页面导航
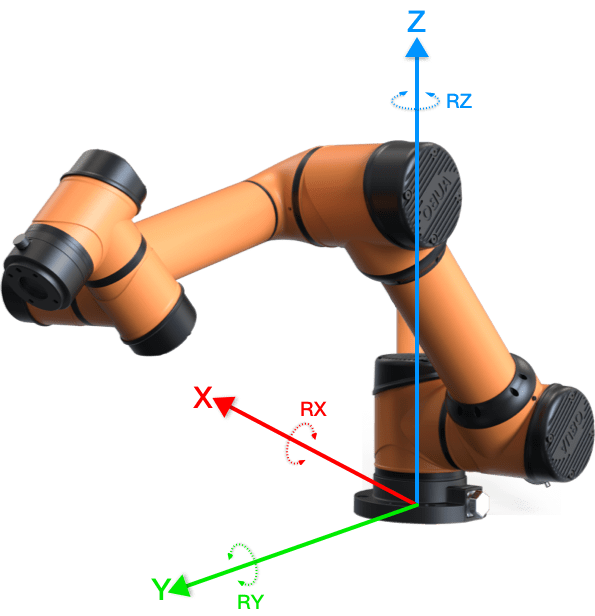
坐标系
机器人包括两个预定义坐标系,其位姿由机器人自身的配置定义。
基座坐标系(Base)
基坐标系的原点位于机器人机座的中心。
工具坐标系(Tool)
工具坐标系的原点位于当前 TCP 的中心。