Appearance
TCP 标定
1. TCP 标定原理
TCP 的位置采用四点标定法来标定 TCP,即找一个尖点,将机械臂工具末端点绕着尖点示教四个位置(姿态差别要大),设置完毕后系统可自动计算出结果。

TCP 的方向采用目标坐标系以及平面上一点法来标定。

2. 操作步骤
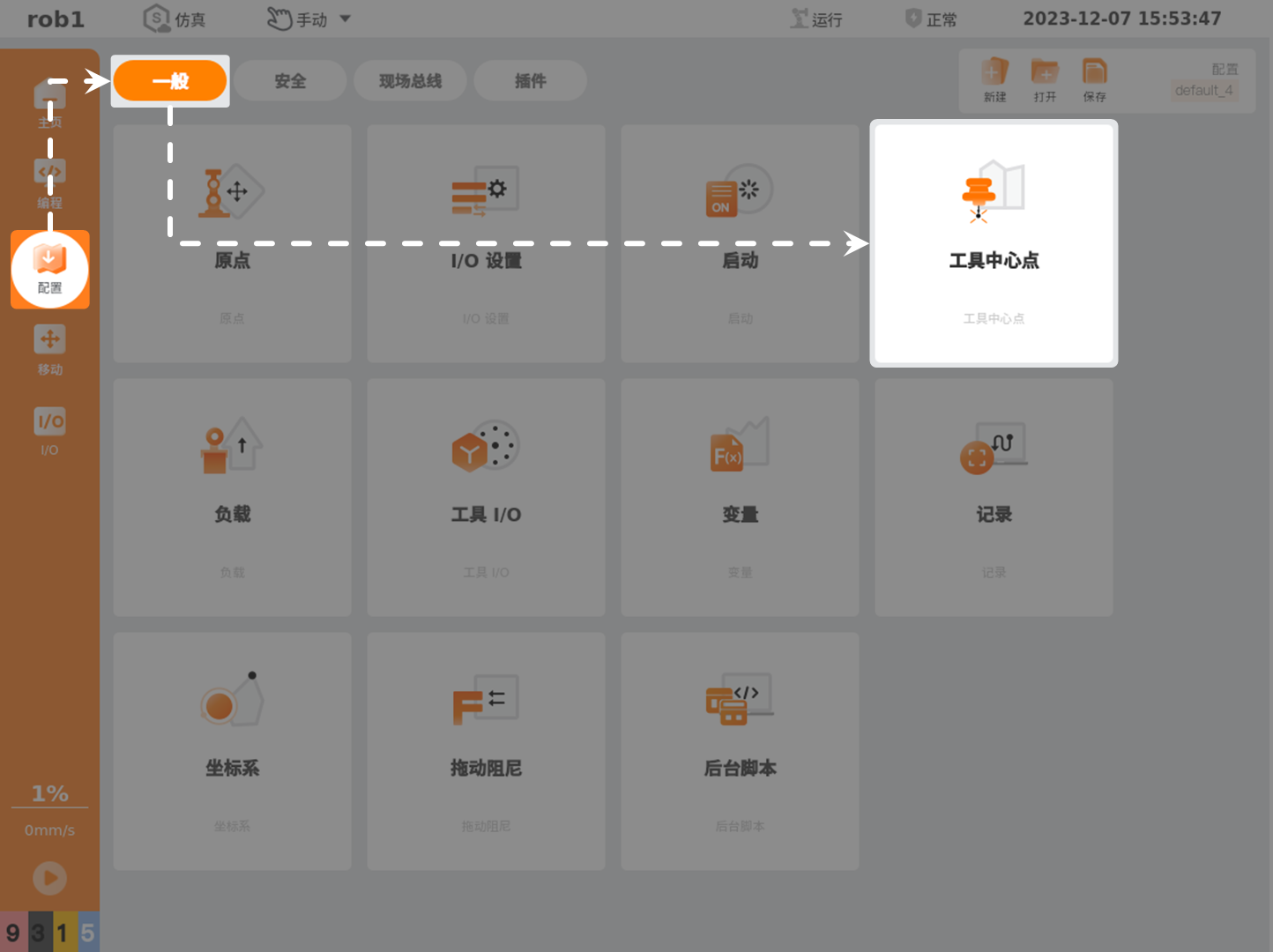
打开 ARCS 示教软件,单击 “配置 > 一般 > 工具中心点”,进入【工具中心点】界面。
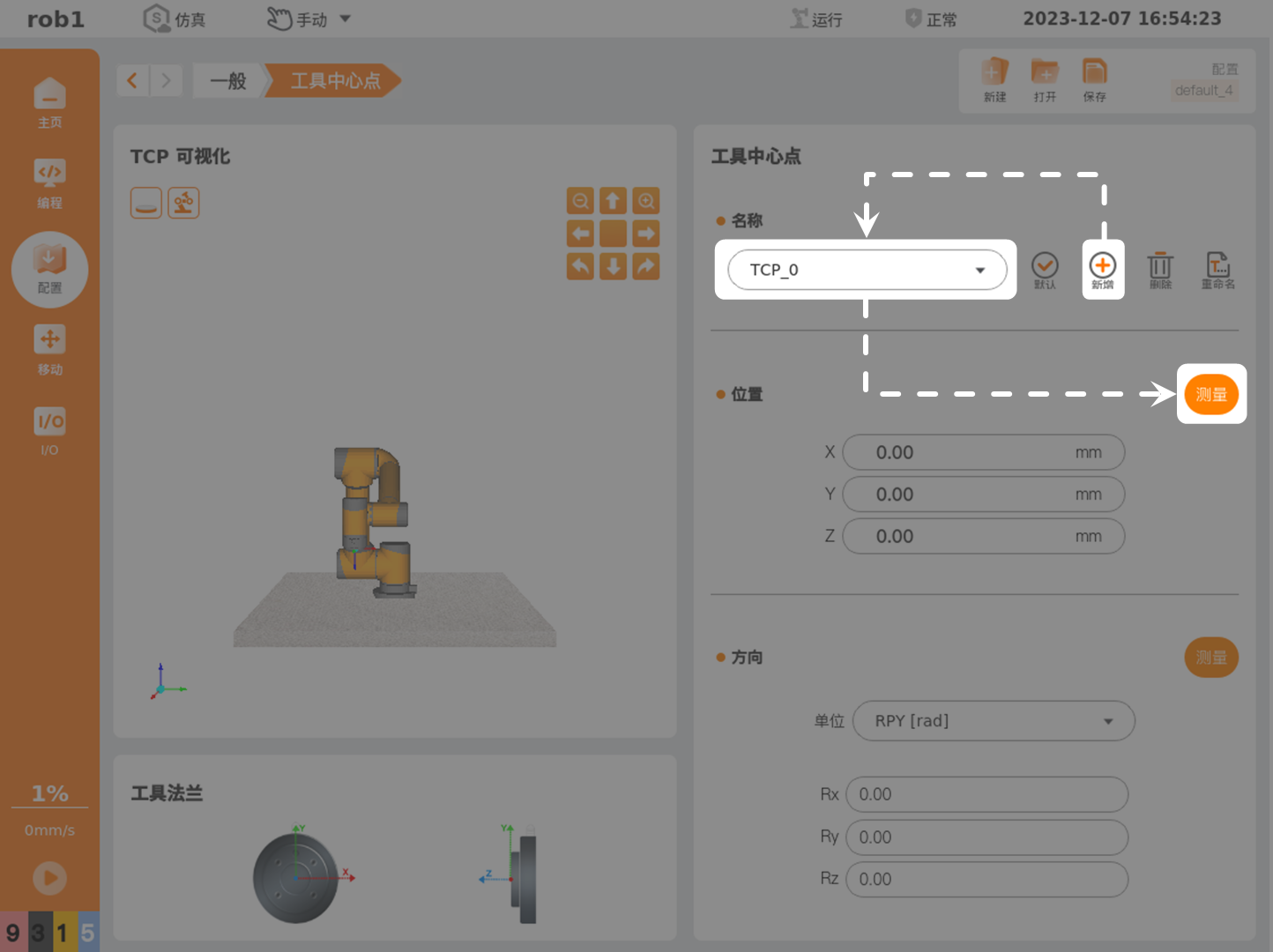
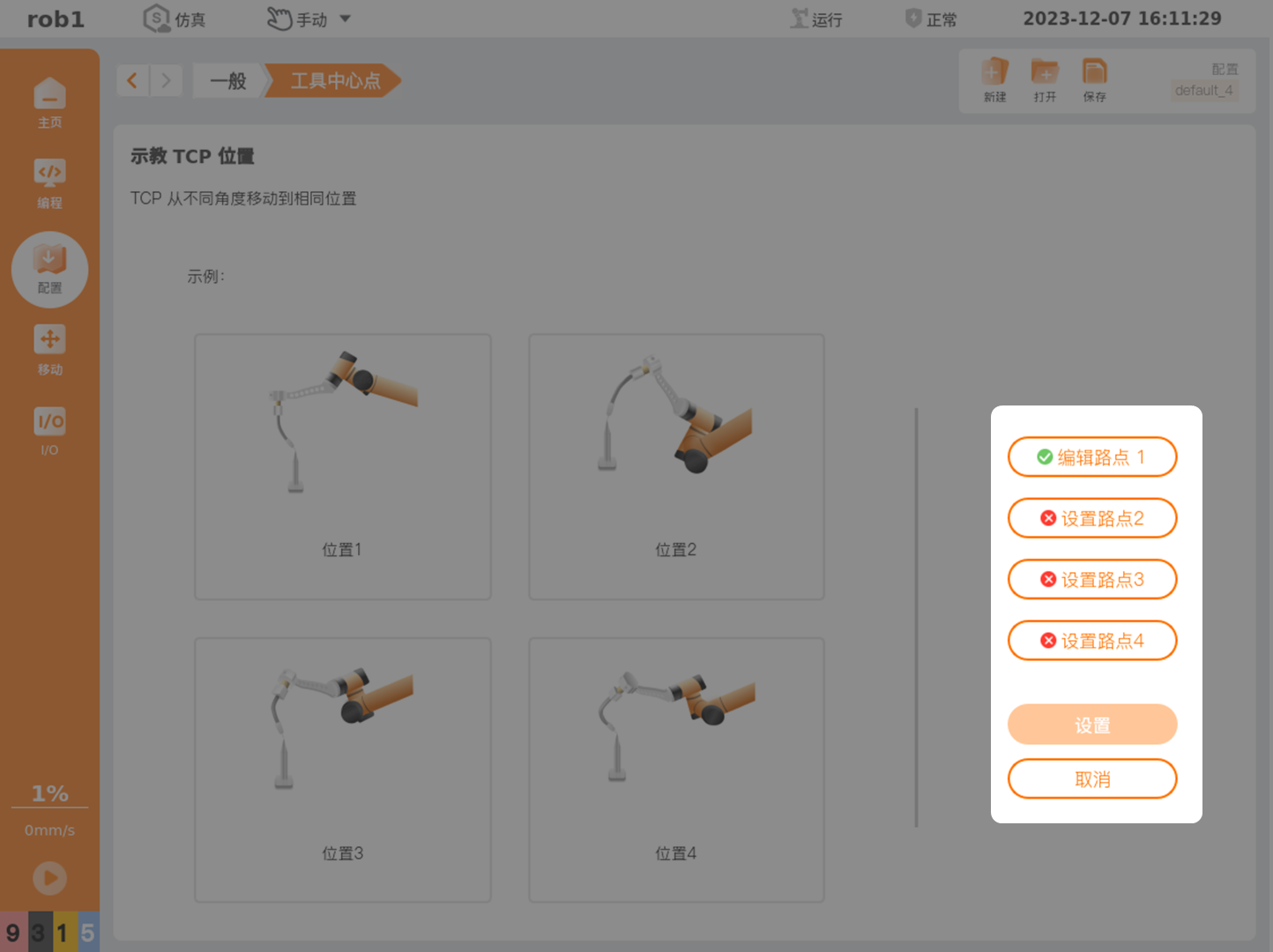
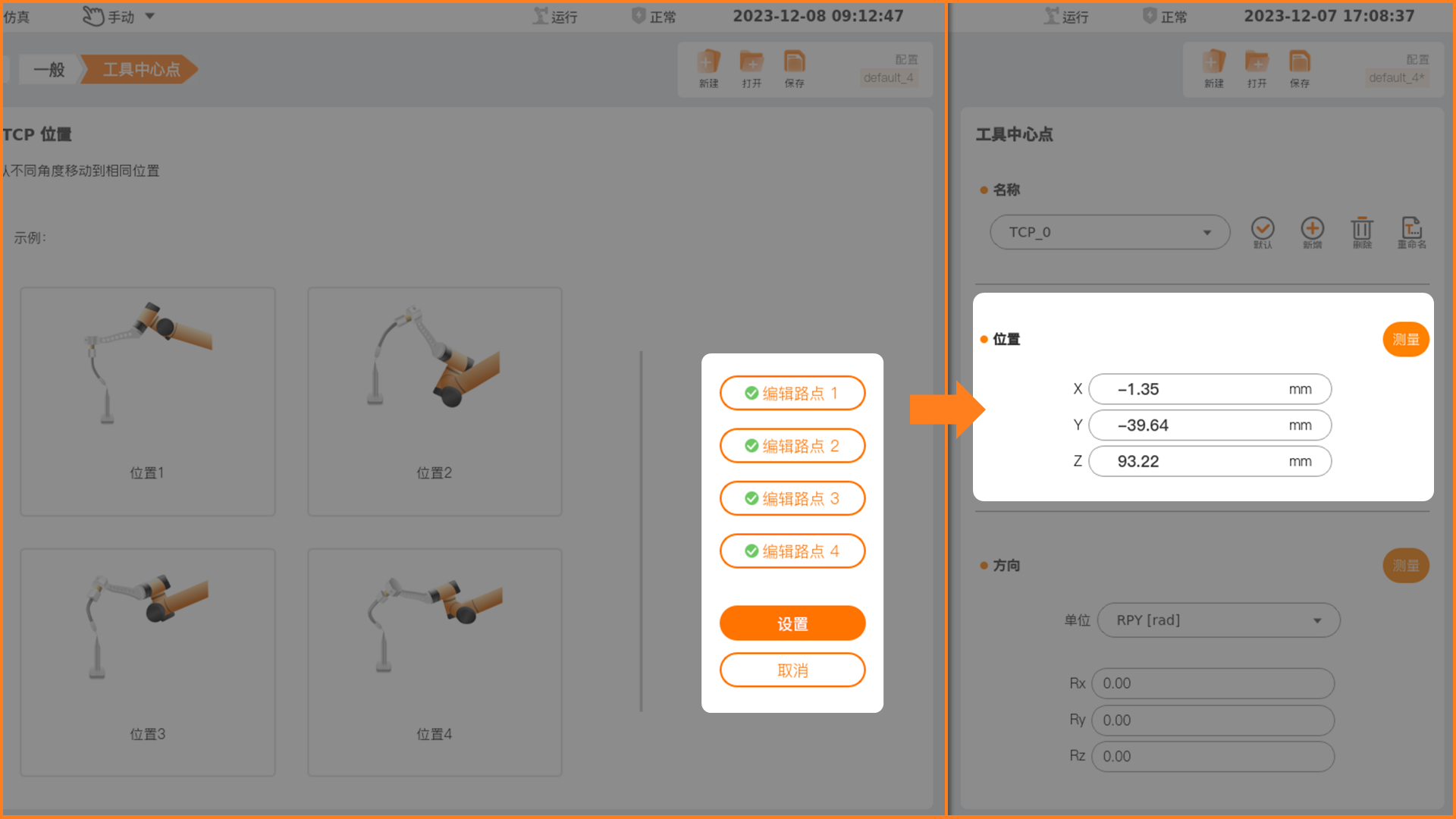
单击【新增】创建 TCP_0,单击【位置 > 测量】,进入【示教 TCP 位置】向导。
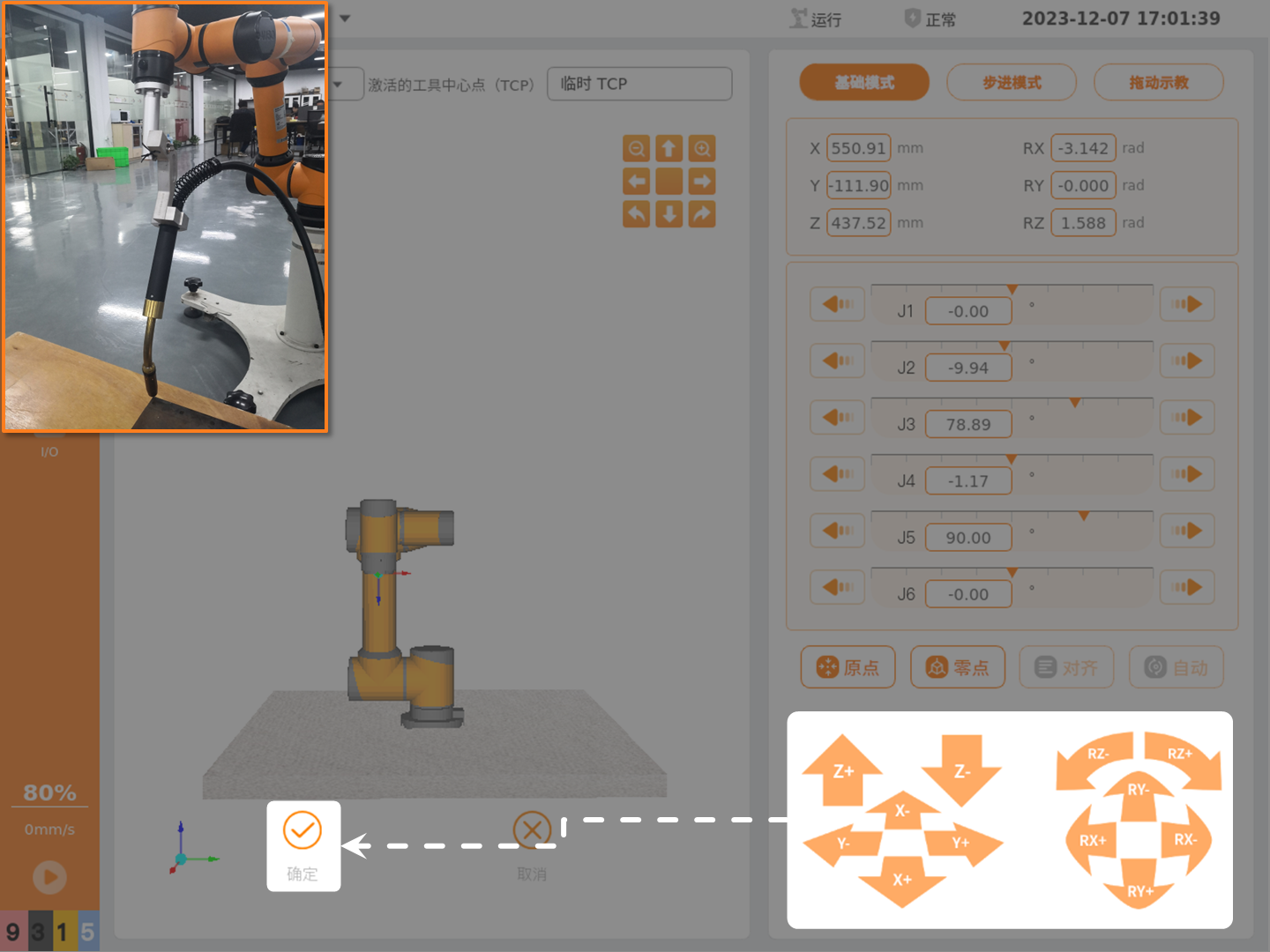
示教四个位置,每个位置的姿态按照示例设置。
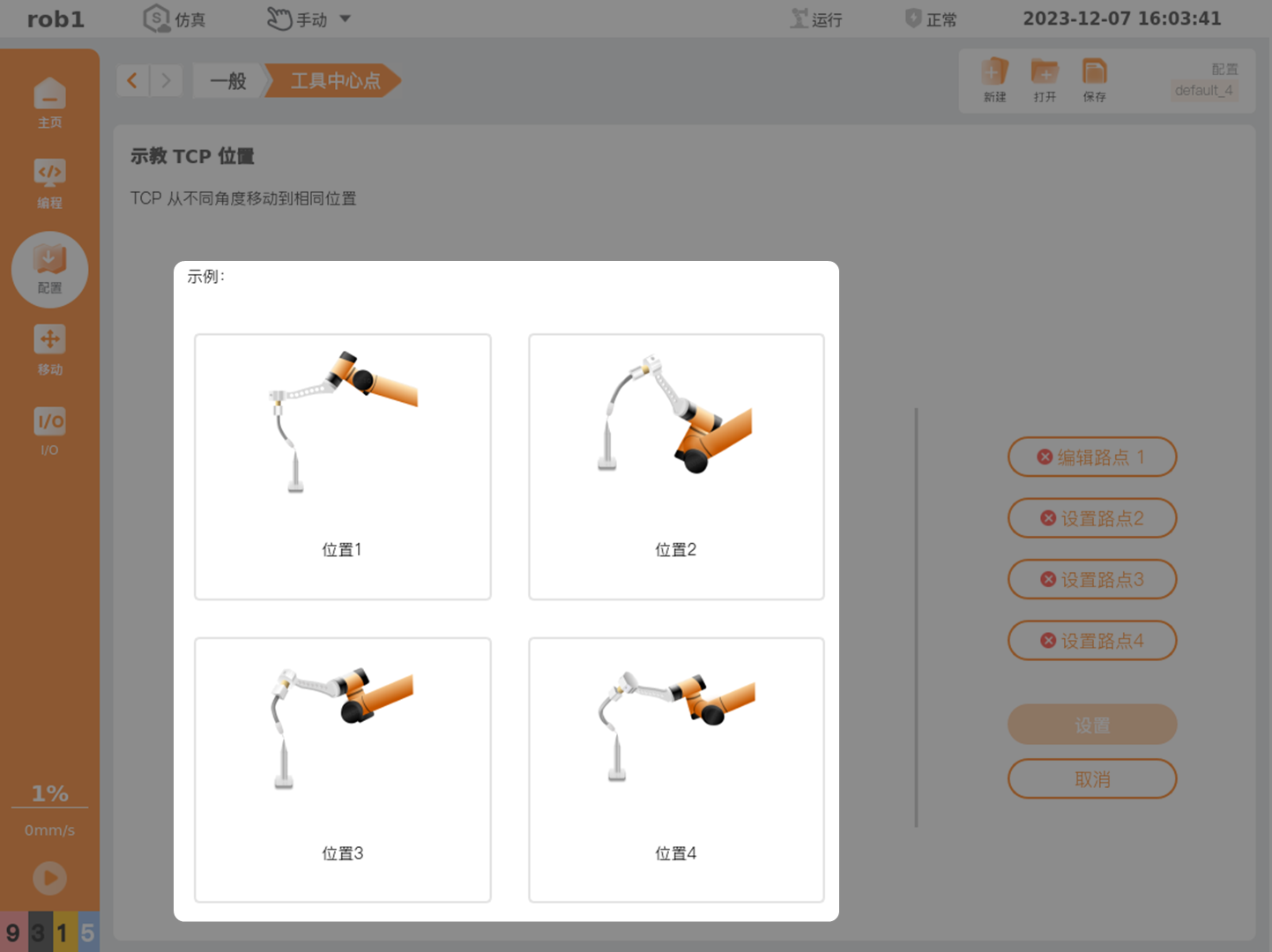
单击【设置路点 1】进入示教界面,设置路点 1,单击【确定】保存并退出示教界面。
已设置路点会显示为
 ,待设置路点会显示为
,待设置路点会显示为  。
。
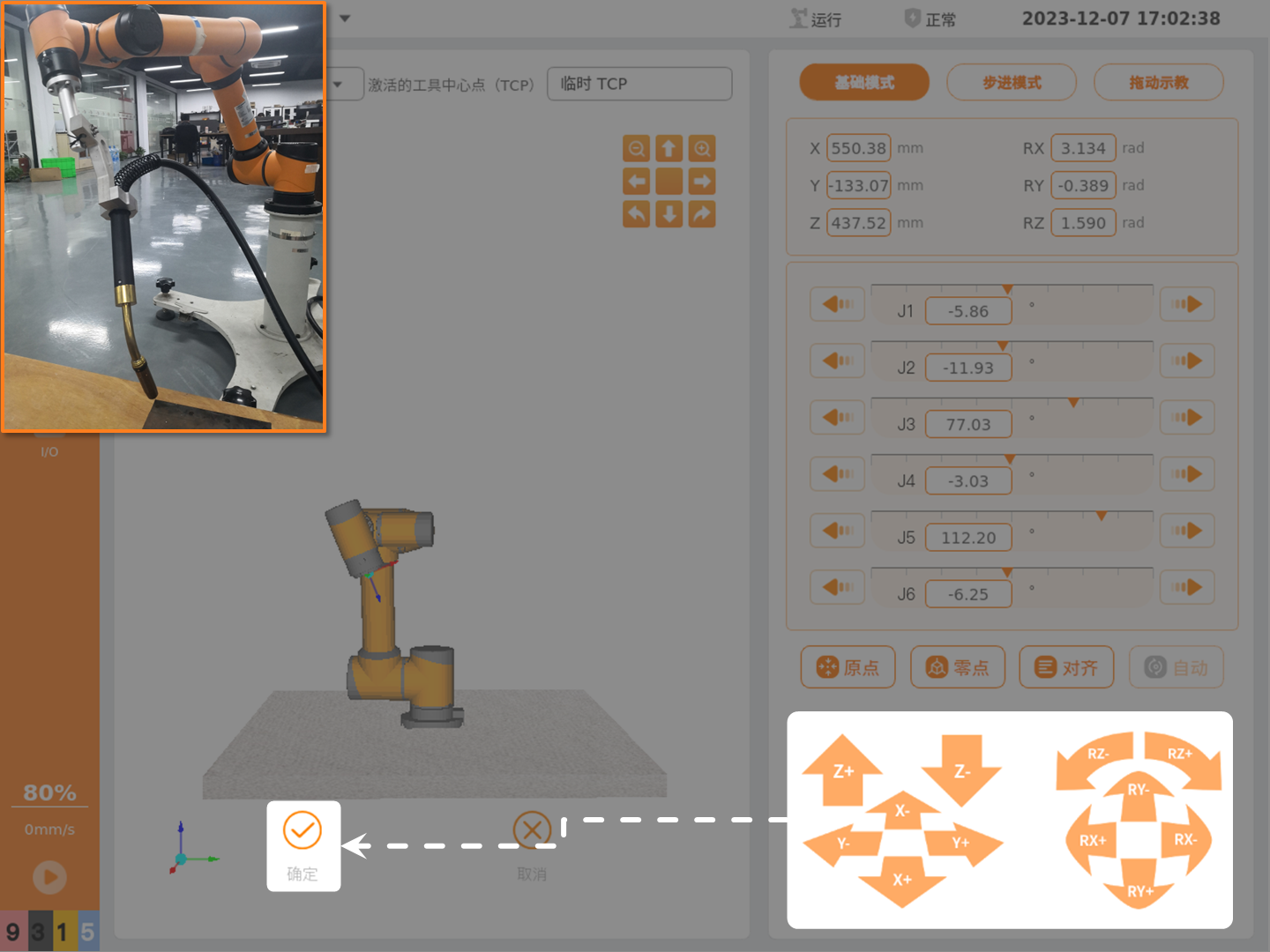
同步骤 3,设置路点 2。
同步骤 3,设置路点 3。
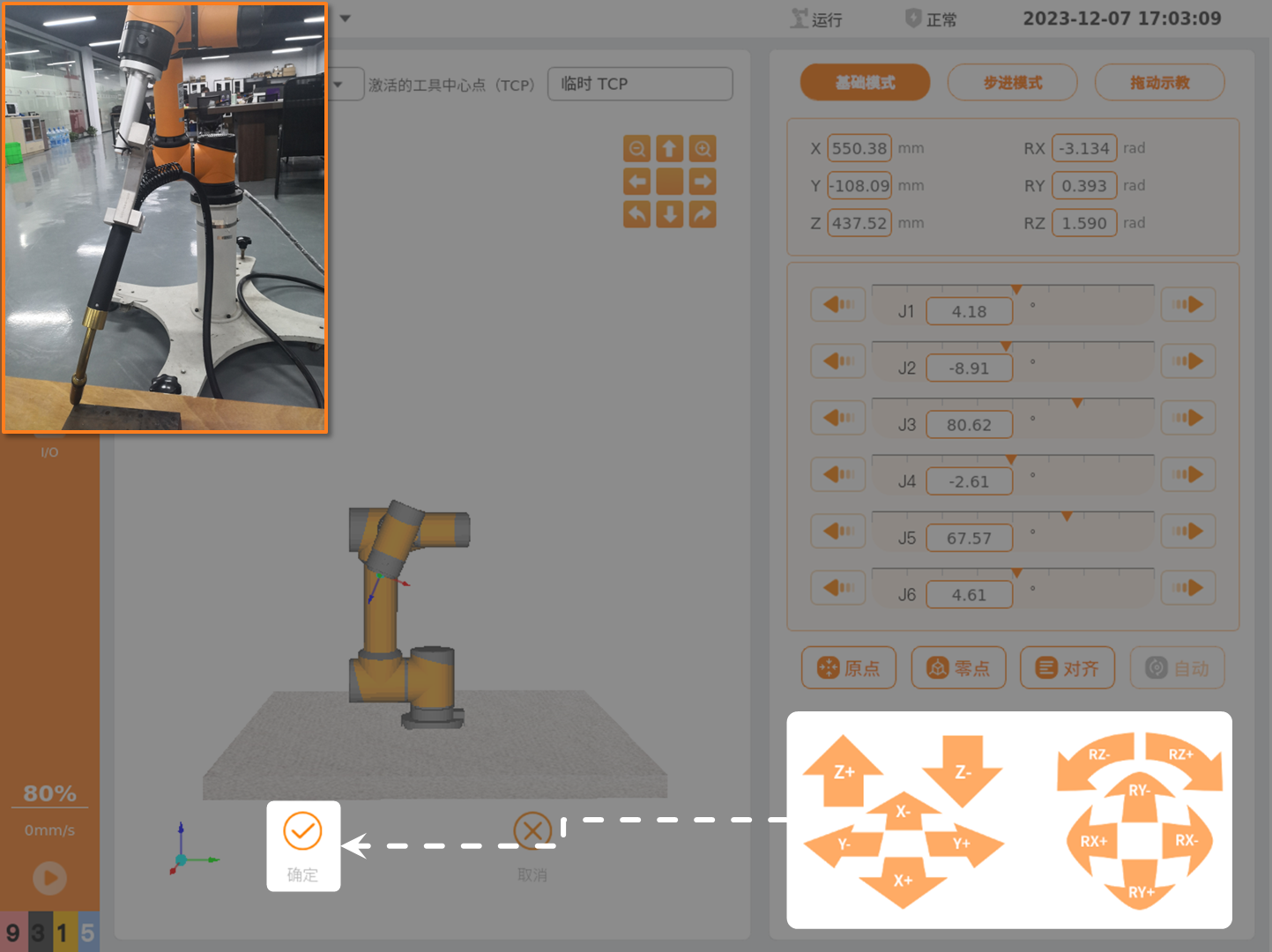
同步骤 3,设置路点 4。

四个路点设置完毕,单击【设置】退出【示教 TCP 位置】向导,查看系统计算 TCP 与法兰中心的偏差值。
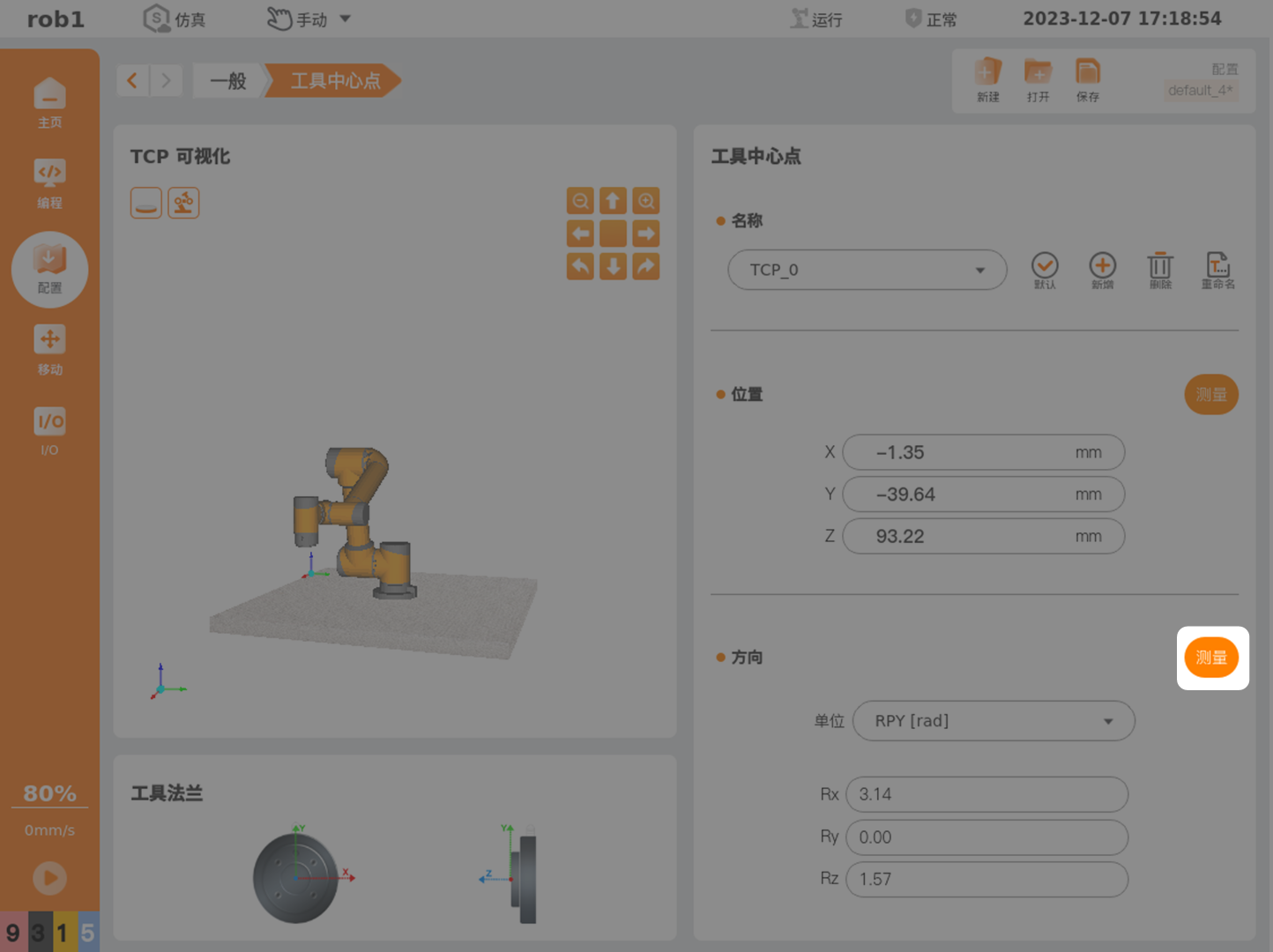
单击【方向 > 测量】,进入【示教 TCP 方向】向导。
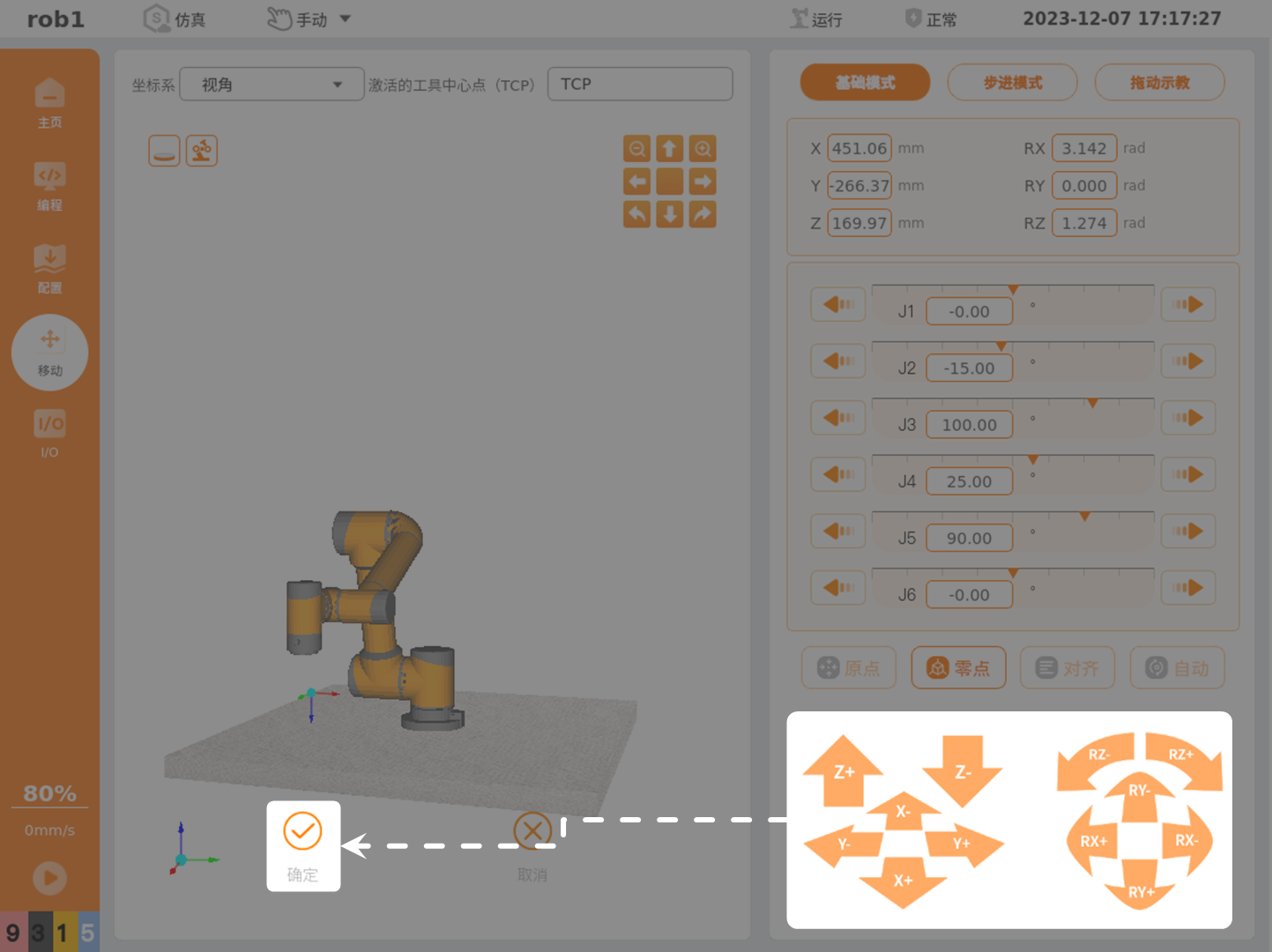
选择一个坐标系, 单击【设置路点】进入示教界面。

移动工具姿态到选择的坐标系 Z 轴方向,此时 TCP 的坐标轴会与选择的坐标系一致,单击【确定】返回【示教 TCP 方向】向导。
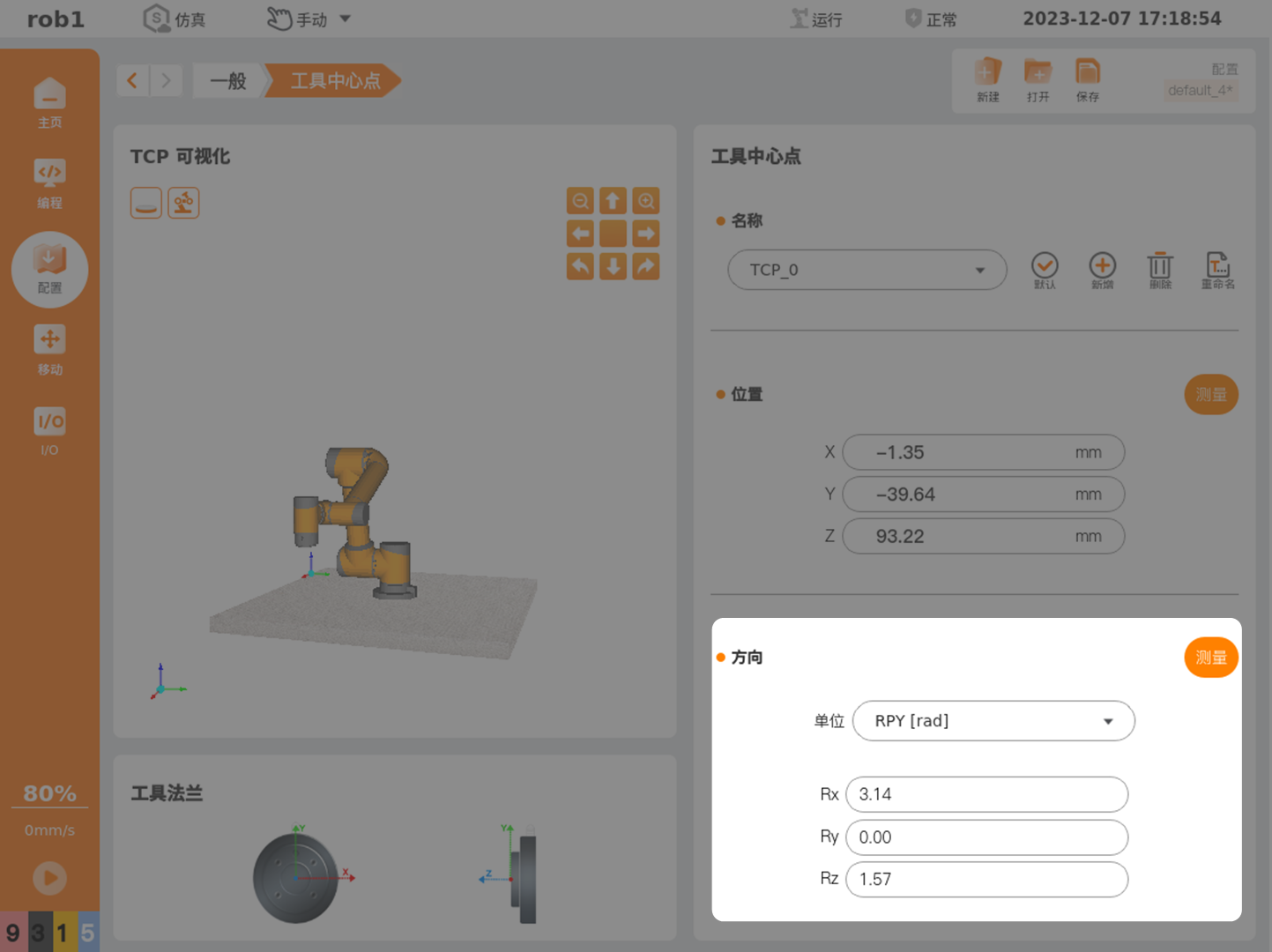
查看系统计算的方向,单击【设置】退出【示教 TCP 位置】向导。

【示教 TCP 位置】向导计算的结果自动填写在 “方向” 参数中。
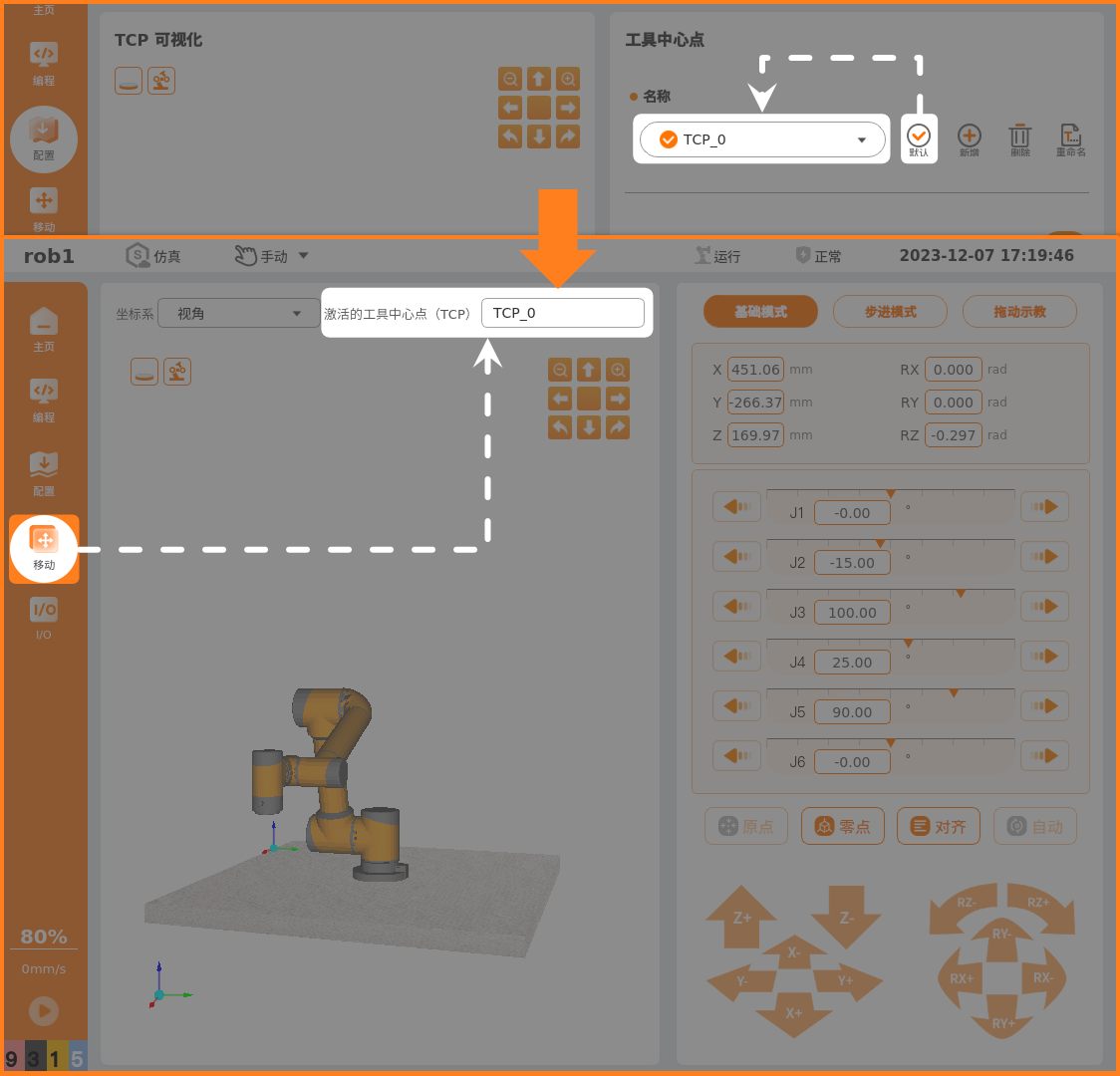
单击【默认】使 “TCP_0” 生效,切换至【移动】界面,可看到 “TCP_0” 正在被使用。