Appearance
servoJoint 接口应用
1. 使用步骤
在使用 servoJoint 接口时,请严格按照下述步骤进行操作,若下述步骤中有某一步骤在操作中有问题,则不能使用 servoJoint 功能,请联系相关工程师进行排查解决。
1.1 检查应用环境
请使用网线直连,目的是减小网络延迟;
请使用实时系统,查看是否是实时系统,如果不是,则需要安装实时内核;
打开终端。
运行命令:
bashuname -r #此命令将显示当前正在运行的内核版本号如果内核版本号的末尾包含
-rt(例如:4.14.195-rt94),则表示该内核已经安装了实时补丁;如果没有-rt标记,则当前机器上没有实时补丁。
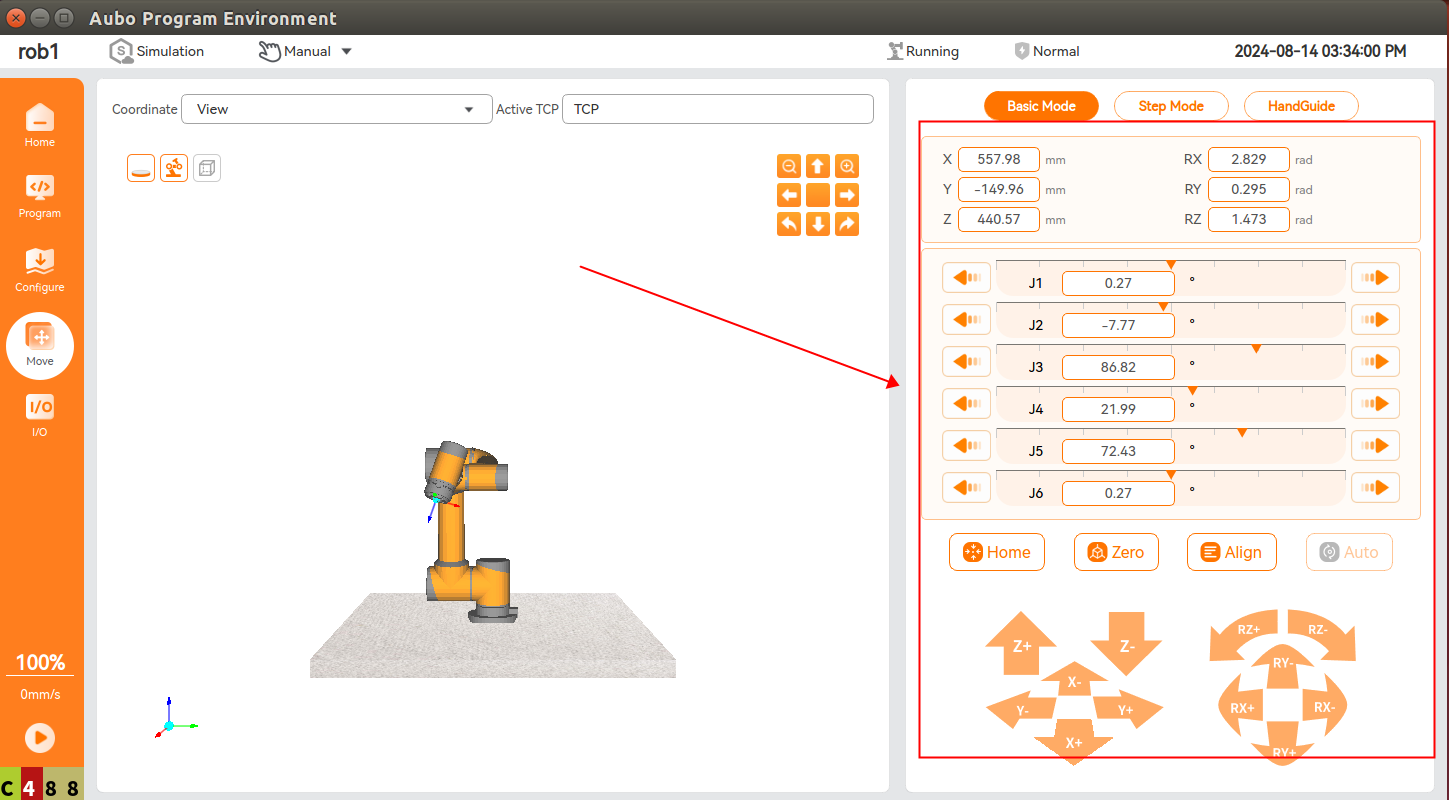
1.2 移动示教测试
- 在上电并释放抱闸后,请在示教器的移动示教界面进行操作,观察机器臂能否正常移动示教,并且运动过程中没有异响、抖动等现象;
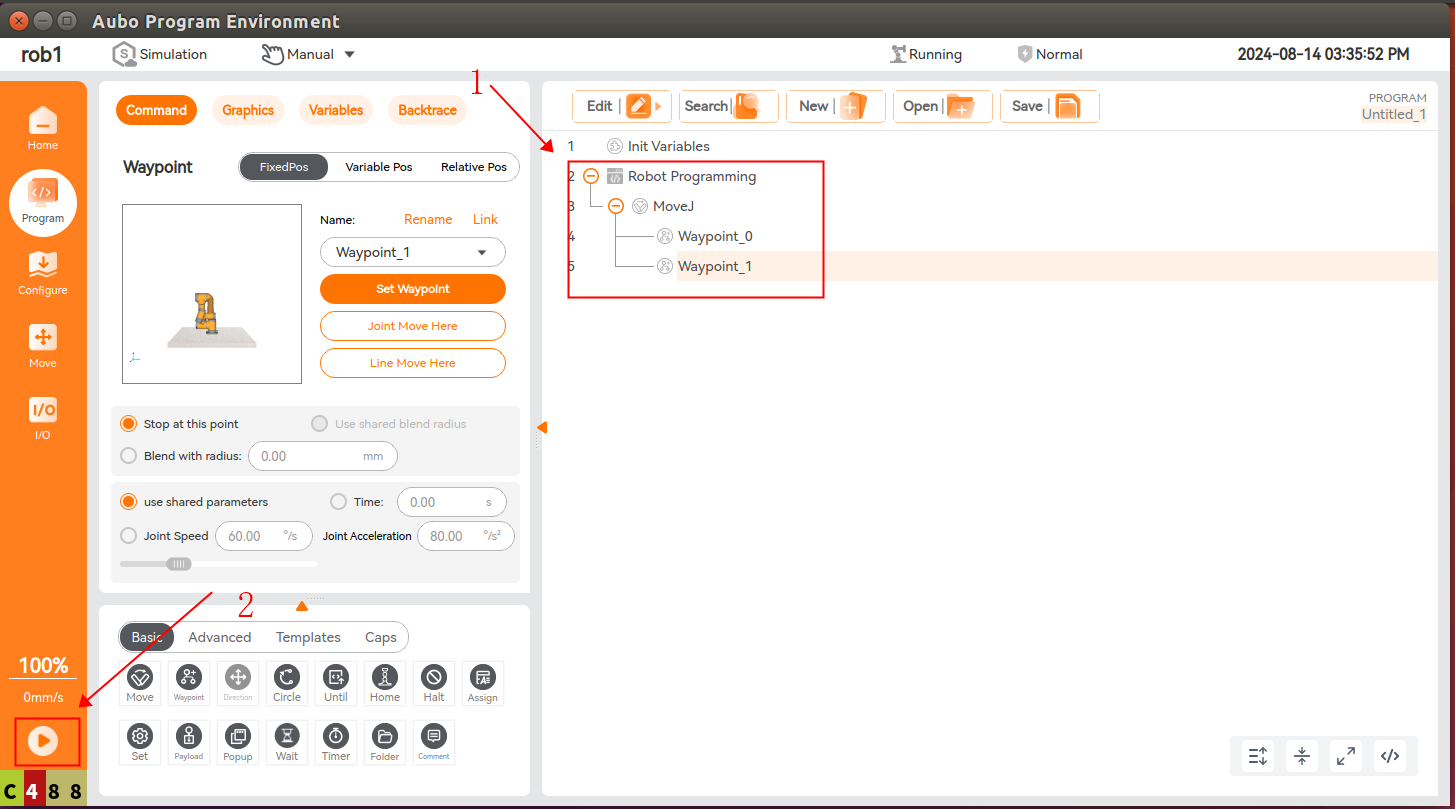
1.3 运行工程测试
- 新建一个简单工程,运行后观察机器臂能否正常运动,并且运动过程中没有异响、抖动等异常现象;
1.4 运行servoj示例测试
- 使用 SDK 中提供的示例进行测试,观察进行 servoJoint 控制时机器臂能否正常运动,主要看运动过程中是否有抖动现象,如果有抖动现象,或者运动过程中会自动停止,请调参,适当增大 t 的值;
注意安全:进行 servoJoint 控制时,请提前把机器臂周围的障碍物移开;
- SDK 示例在 SDK 的包里,包括 C++ 示例和 Python 示例;
SDK下载: https://download.aubo-robotics.cn/sdk/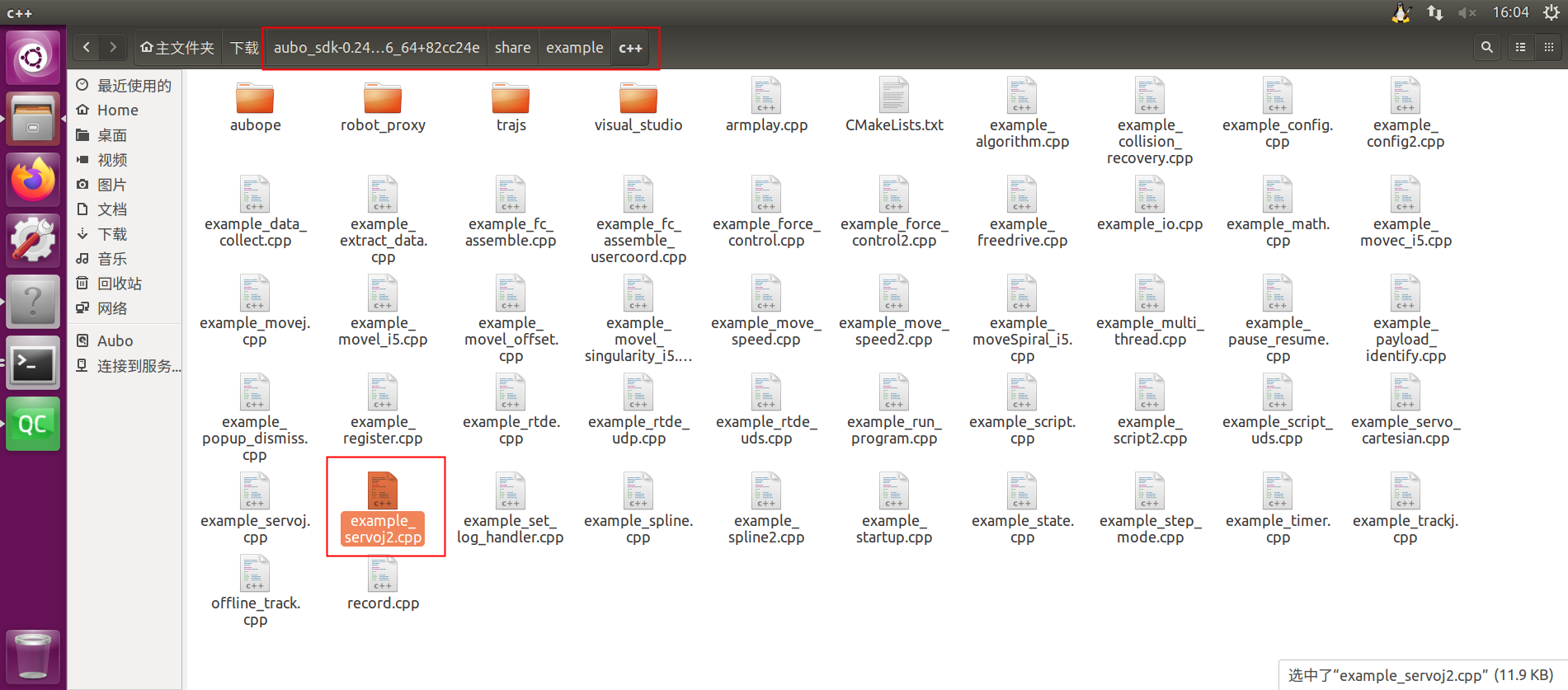
注意:示例下载后不一定能直接运行,使用时请简单看下示例的逻辑并做适当修改,比如轨迹文件路径和调用的方法函数;
1.5 集成 SDK 示例代码逻辑
按照上面的测试步骤操作都没有问题时,接下来可按照示例代码逻辑把 servoJoint 功能集成到个人的项目中;关键逻辑如下:
- 使用 moveJoint 接口运动到轨迹中的第一个点(serovJoint控制的初始点);
c++
// 接口调用: 关节运动到轨迹中的第一个点,否则容易引起较大超调
robot_interface->getMotionControl()->moveJoint(traj[0], 80 * (M_PI / 180),
60 * (M_PI / 180), 0, 0);
// 阻塞
int ret = waitArrival(robot_interface);
if (ret == 0) {
std::cout << "关节运动到轨迹文件中的第一个路点成功" << std::endl;
} else {
std::cout << "关节运动到轨迹文件中的第一个路点失败" << std::endl;
}- 使用
setServoMode(true)开启 servoJoint 模式(只在开始控制时执行一次);
c++
// 接口调用: 开启 servo 模式
cli->getRobotInterface(robot_name)->getMotionControl()->setServoMode(true);
// 等待进入 servo 模式
int i = 0;
while (!cli->getRobotInterface(robot_name)
->getMotionControl()
->isServoModeEnabled()) {
if (i++ > 5) { // 若Servo 模式使能失败!可适当调大该判断条件值
std::cout << "Servo 模式使能失败! 当前的 Servo 模式是 "
<< cli->getRobotInterface(robot_name)
->getMotionControl()
->isServoModeEnabled()
<< std::endl;
return -1;
}
std::this_thread::sleep_for(std::chrono::milliseconds(5));
}- 调用 servoJoint 接口开始进行运动控制(控制过程中可执行多次);
c++
// 接口调用: 关节伺服运动
cli->getRobotInterface(robot_name)
->getMotionControl()
->servoJoint(traj[i], 0.1, 0.2, 0.06, 0., 0.);
// sleep的作用是模拟调用 servoJoint 的间隔时间,根据实际情况可删除该行
std::this_thread::sleep_for(std::chrono::milliseconds(5));- 结束时使用setServoMode(false)退出 servoJoint 模式(只在结束时执行一次);
c++
// 接口调用: 关闭 servo 模式
cli->getRobotInterface(robot_name)->getMotionControl()->setServoMode(false);
// 等待结束 servo 模式
while (cli->getRobotInterface(robot_name)
->getMotionControl()
->isServoModeEnabled()) {
if (i++ > 5) {
std::cout << "Servo 模式失能失败! 当前的 Servo 模式是 "
<< cli->getRobotInterface(robot_name)
->getMotionControl()
->isServoModeEnabled()
<< std::endl;
return -1;
}
std::this_thread::sleep_for(std::chrono::milliseconds(5));
}2. 常见问题解决
2.1 servoJoint 的接口参数含义
servoJoint 接口说明参考:https://docs.aubo-robotics.cn/aubo_sdk_docs/
2.2 servoJoint 相关日志太多
在使用 servoJoint 功能时,发现 servoJoint 相关日志记录的过多,其中包含了需要算法计算的相关日志,可以通过配置来选择是否记录 servoJoint 的算法相关日志,从而减少日志记录内容;
c++
// 配置项如下:
debug = false // 表示关闭记录算法相关日志
debug = true // 表示开启记录算法相关日志在 ~/arcs_ws/conf/aubo_control.conf 中进行配置: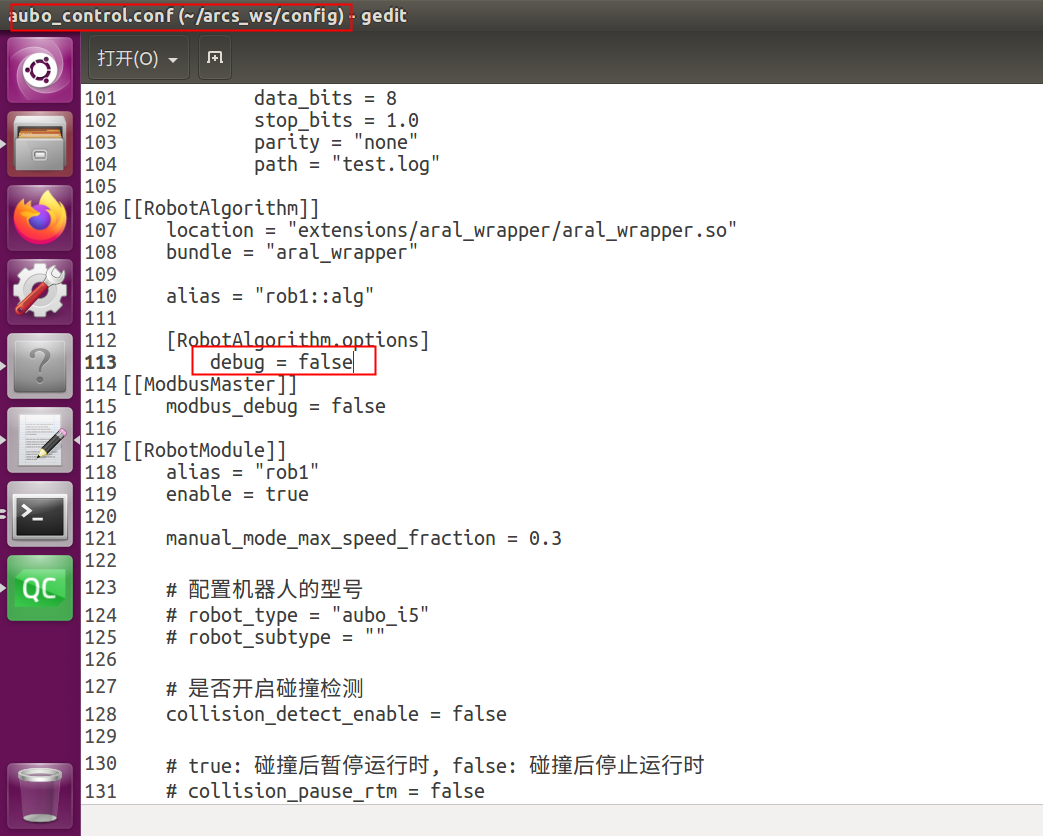
效果:
配置前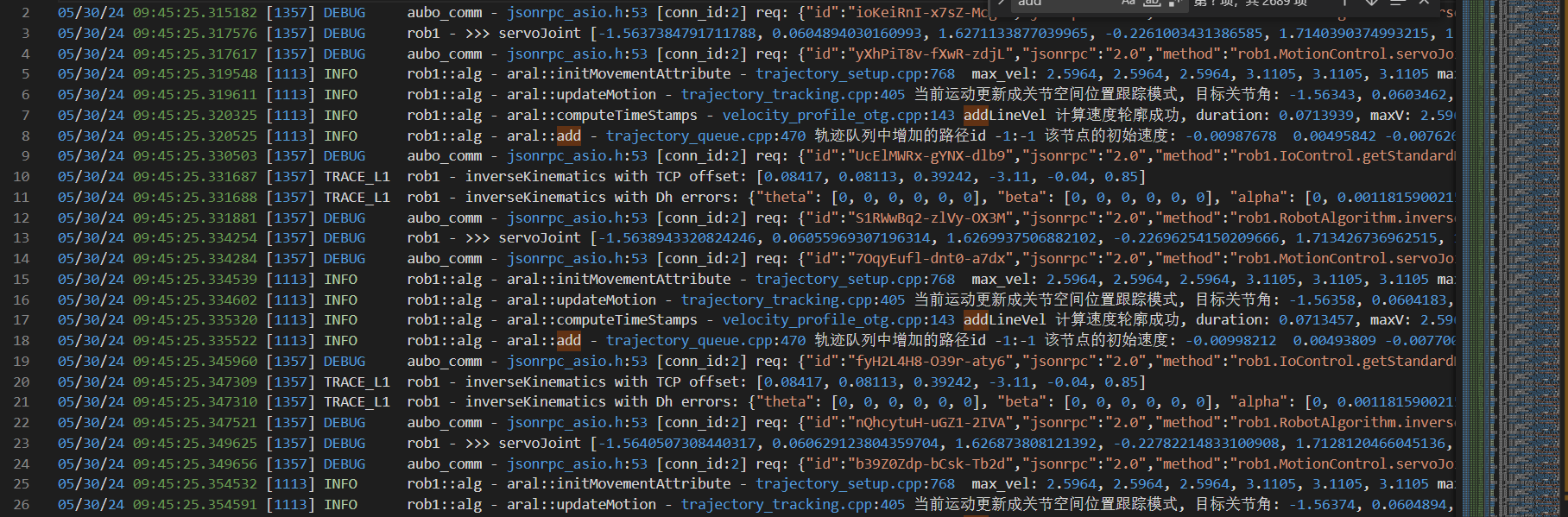
配置后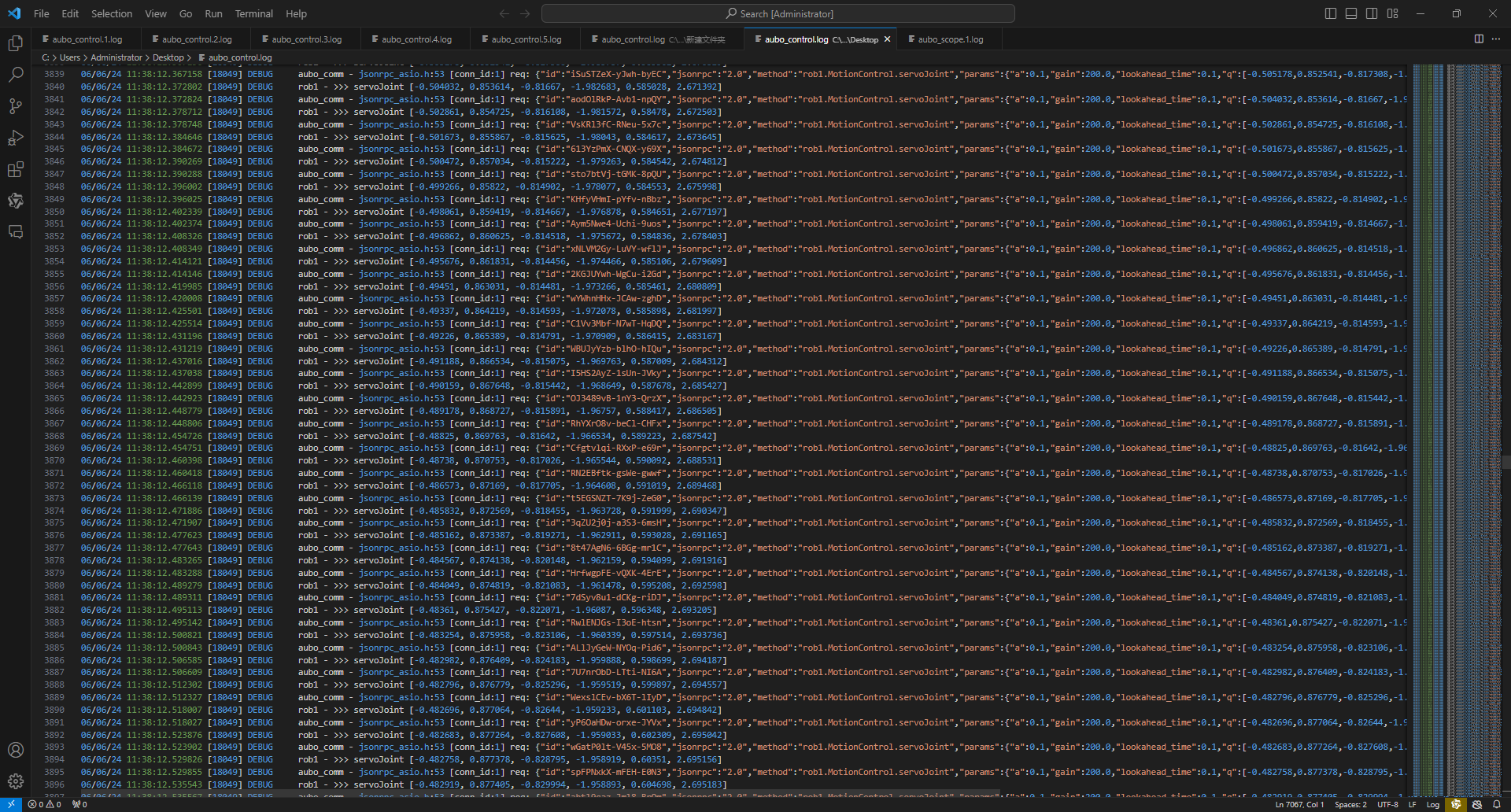
2.3 自动退出 servoJoint 模式
ServoJ 功能有自动退出 servoJoint 模式的机制,退出 servoJoint 模式后,不能继续控制机器臂运动,只能重新进入 servoJoint 模式;
自动退出机制包括:
- 通过 SDK 调用 stopJoint/stopLine/abort 等接口,会自动退出 servo 模式;
- 当进入了拖动模式,会自动退出 servoJoint 模式;
- 长时间没有收到 servoJoint 指令( t 的 5 倍),会自动退出 servoJoint 模式;
当退出 servoJoint 模式后,要想继续使用 ServoJ 功能,必须使用 SDK 调用 setServoMode(true) 重新进入 servoJoint 模式;
自动退出时记录的日志如下: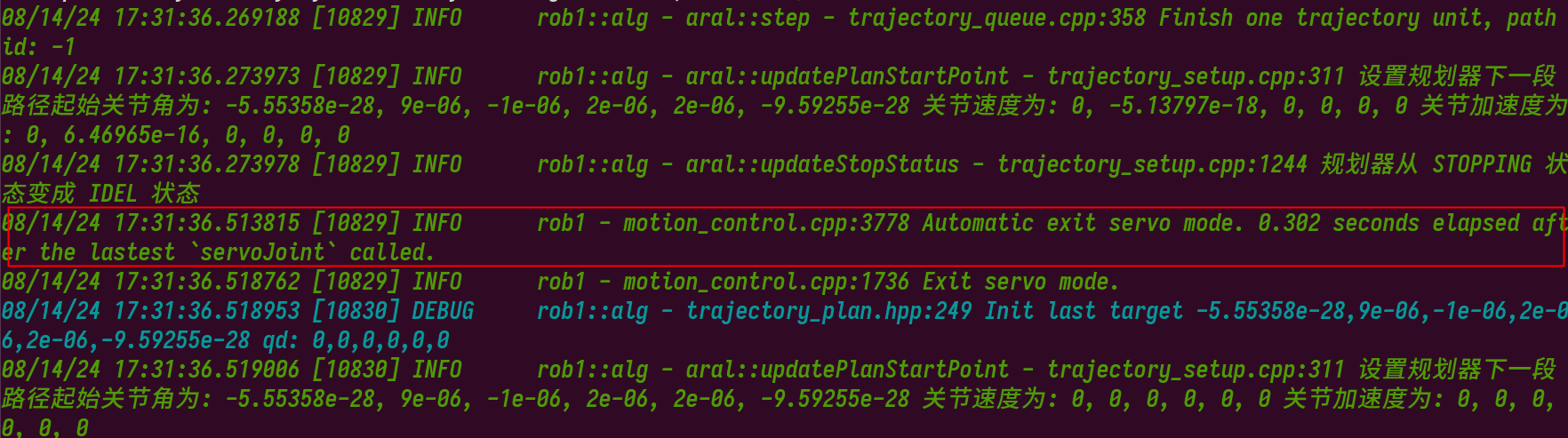
2.4 servoJoint 运动失败
- 查看 aubo_control.log 日志,看是否是自动退出了 servoJoint 模式,可以适当增大参数 t 值进行测试;
- 查看示教器是否有弹窗报异常,比如碰撞等,可以根据示教器弹窗提示进行操作解决;
2.5 如何采集 servoJoint 运行的诊断数据
在进行 servoJoint 控制时,发现机器臂抖动,或者运行的轨迹不对等情况,如有需要,请使用以下接口采集诊断数据,可自行分析,也可发给相关研发人员;
参考代码示例:
c++
// 调用 startRecord 接口开始记录诊断数据(只开始控制时执行一次),可将这条语句放在 setServoMode(true) 之后
robot_interface->getRobotManage()->startRecord("servoj_test.csv");
// 调用 servoJoint 接口开始进行运动控制
for (size_t i = 1; i < traj.size(); i++) {
// 接口调用: 关节伺服运动
cli->getRobotInterface(robot_name)
->getMotionControl()
->servoJoint(traj[i], 0.1, 0.2, 0.06, 0, 0);
std::this_thread::sleep_for(std::chrono::milliseconds(5));
}
// 调用 stopRecord 接口结束记录诊断数据(只结束控制时执行一次),可将这条语句放在 setServoMode(false) 之前
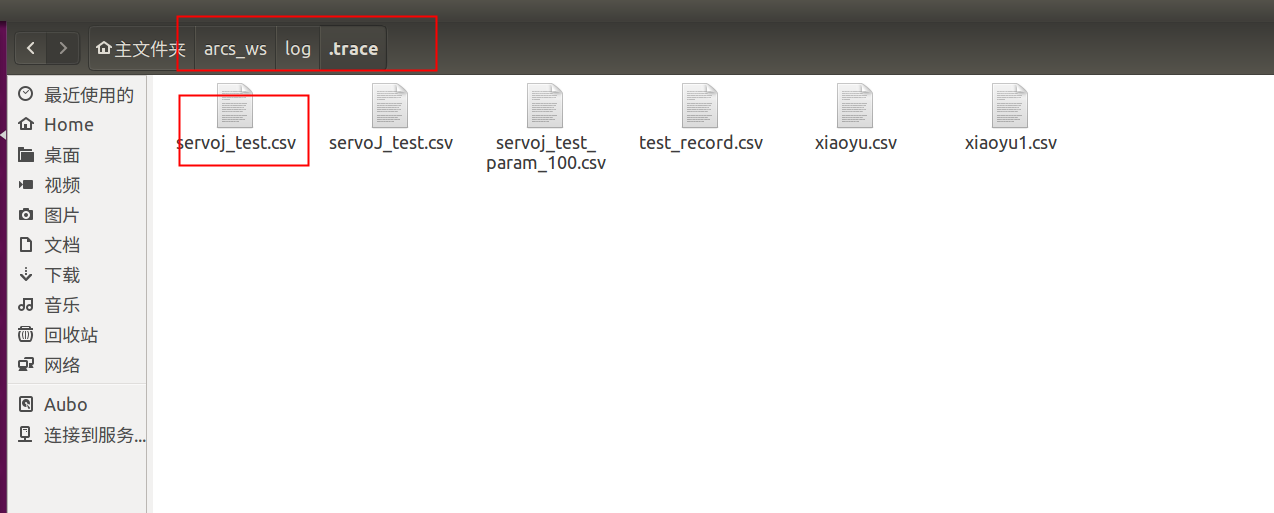
robot_interface->getRobotManage()->stopRecord();整个运动控制流程结束后,诊断数据会生成在~/arcs_ws/log/.trace 文件夹下:
注意:.trace文件夹是个可隐藏的文件夹;