基本原理介绍
基础定义
坐标系(Coordinate System): 用一个原点和一组相互正交、带方向的基轴(常为 X、Y、Z)来定义的参考框架,用于在特定单位下唯一表示空间中点的位置与方向。
- 2D 含两轴(X、Y),3D 含三轴(X、Y、Z);
- 需约定手性(常用右手系)与单位(mm、m 等);
- 相对同一坐标系给出的向量和姿态具有可比性与可组合性。
常见坐标变换类型
平移(translation): poseAdd()
- 含义:把同一个点在同一坐标系里挪位置,方向不变。
- 公式(点从B系表达变到A系时带平移):
这里
负责“转方向”, 负责“加位置”。只有平移时就 。
旋转(rotation): poseRotation()
含义:在同一坐标系里转方向,位置相对原点绕圈改变。
公式:
, ,满足 , 。 常用表示法(3D):
- 欧拉角 ZYX(yaw-pitch-roll):
- 轴—角(绕单位轴
旋转角 ):罗德里格公式
- 欧拉角 ZYX(yaw-pitch-roll):
平移+旋转一起(位姿/齐次变换): poseTrans()
把旋转和平移打包成一个 4×4:
- 组合顺序:右乘离点更近的那个变换。 例如先在TCP自身系里偏移/旋转(
),再放回基座:
- 逆变换 poseInverse(): 把“从 B 到 A 的位姿”转换到“从 A 到 B 的位姿”,
应用示例
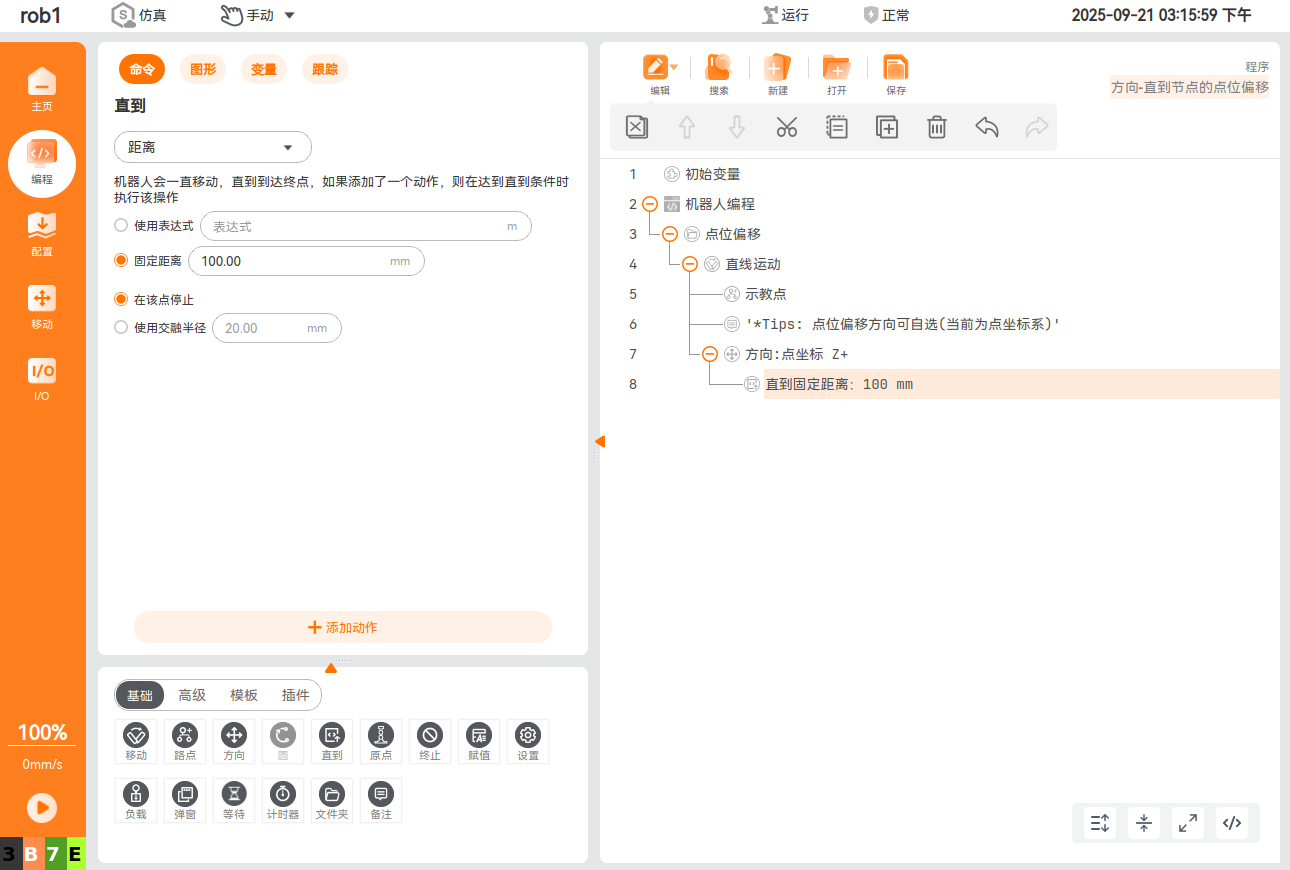
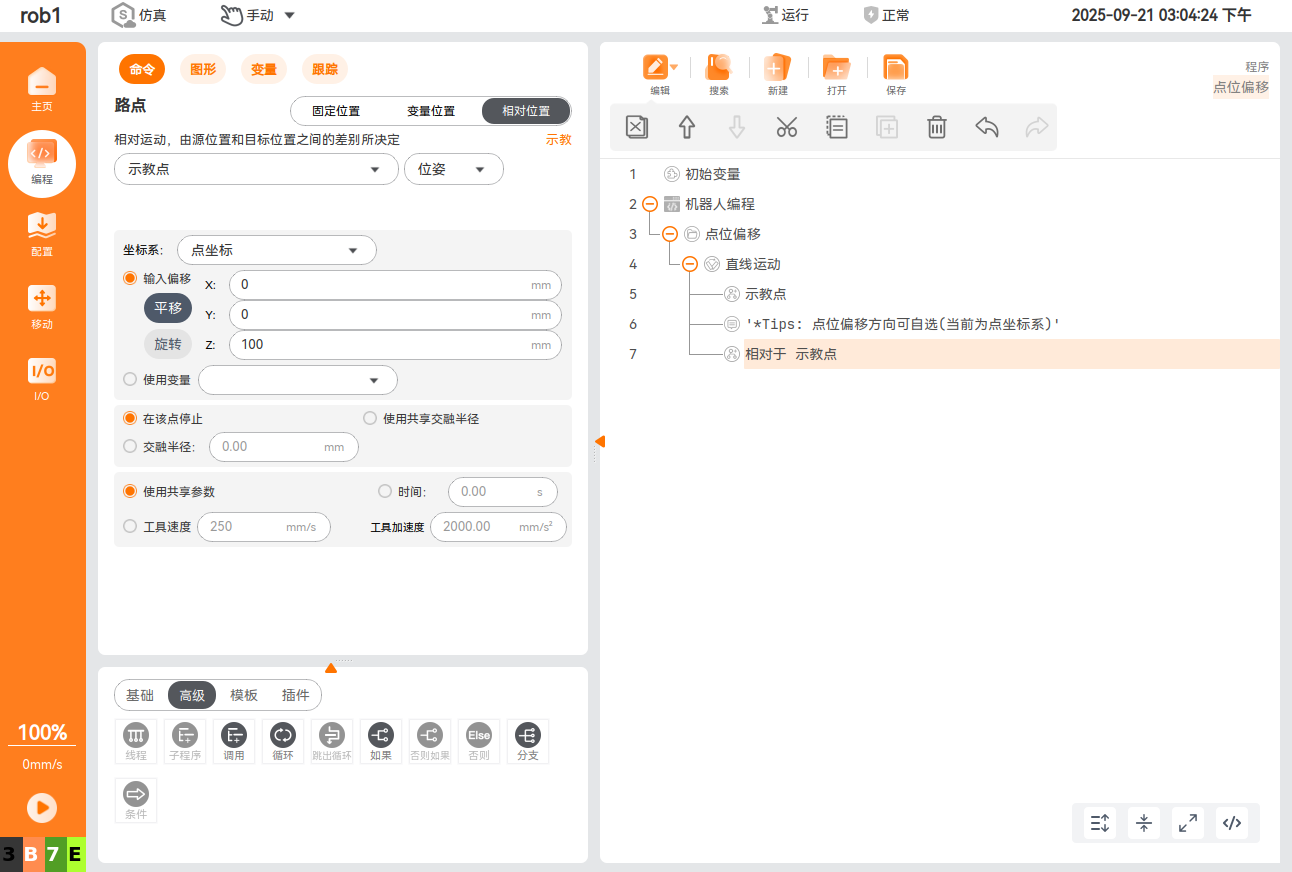
1. 点位偏移
方向-直到节点实现点位偏移
0.31分支特性:相对于变量或路点实现点位偏移
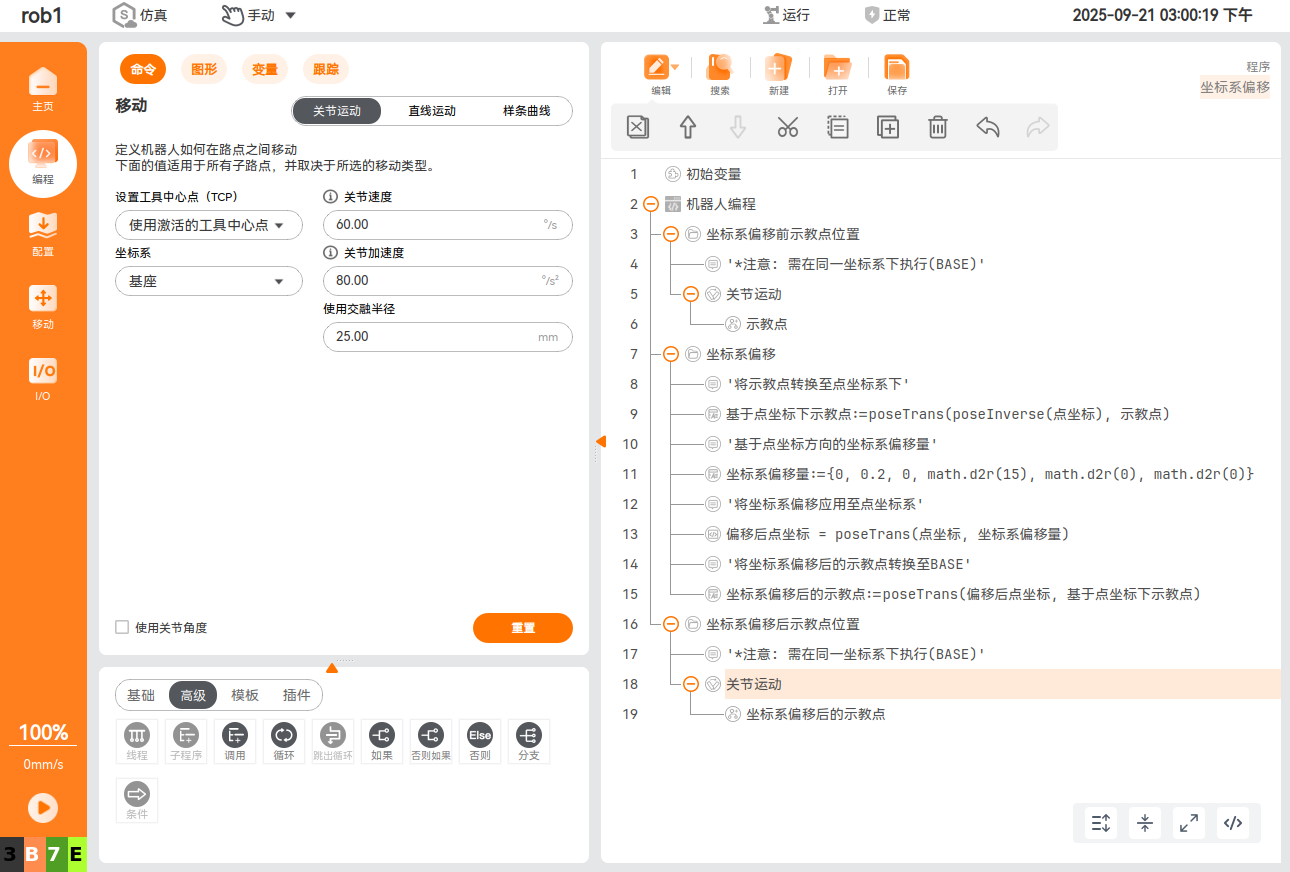
2. 坐标系偏移
通过自定义坐标系实现偏移
2. 坐标系 + 点位偏移
