视觉定位使用指南
一、功能概述
视觉定位功能依托视觉节点,提供零代码配置的 Socket 通信解决方案。用户可通过图形化界面完成全流程配置,系统自动生成底层 Socket 脚本,无需编写或接触任何代码。
系统架构
节点触发(相机配置)> 后端驱动 > socket 通信 > 视觉系统 > 图像采集、处理 > 输出结果 > 编程应用。
核心组件
- 视觉节点:相机配置的选择与触发识别流程。
- 相机配置模块:相机通信参数管理。
- 通信驱动:任务执行逻辑控制。
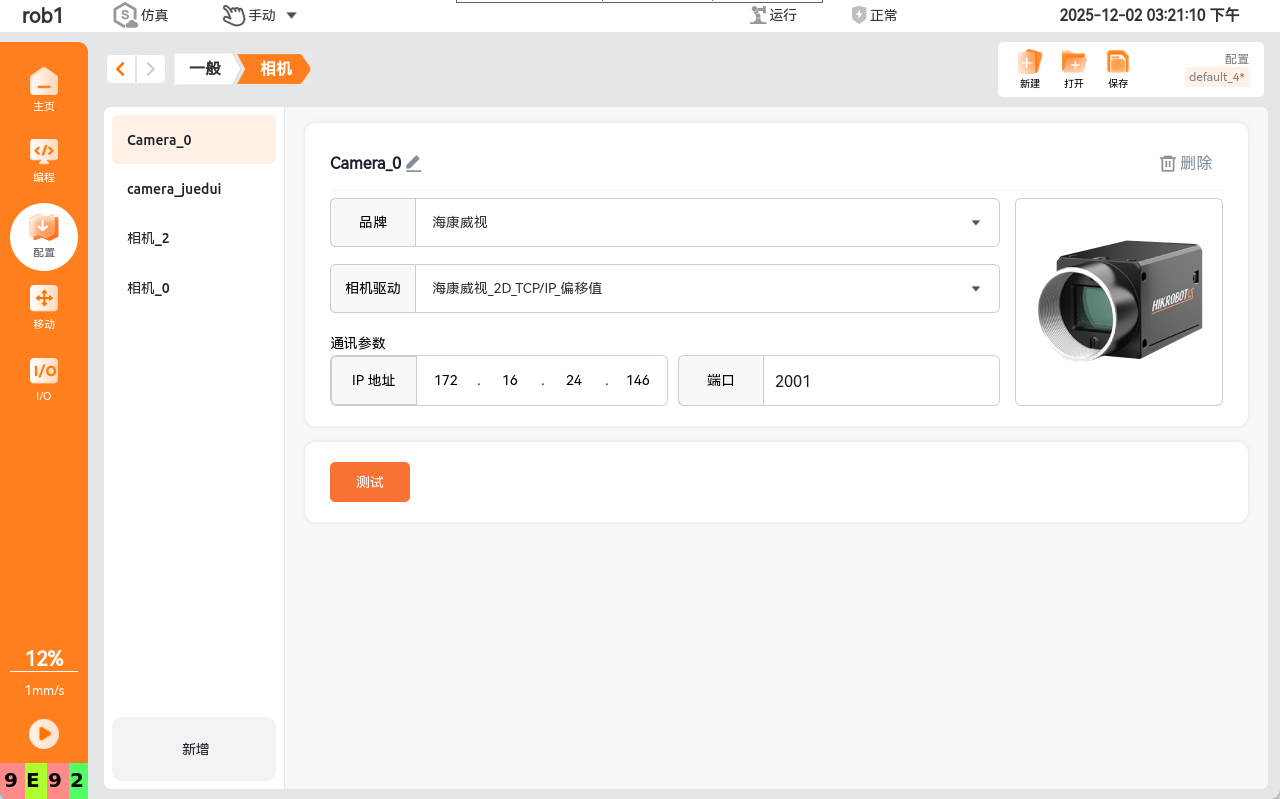
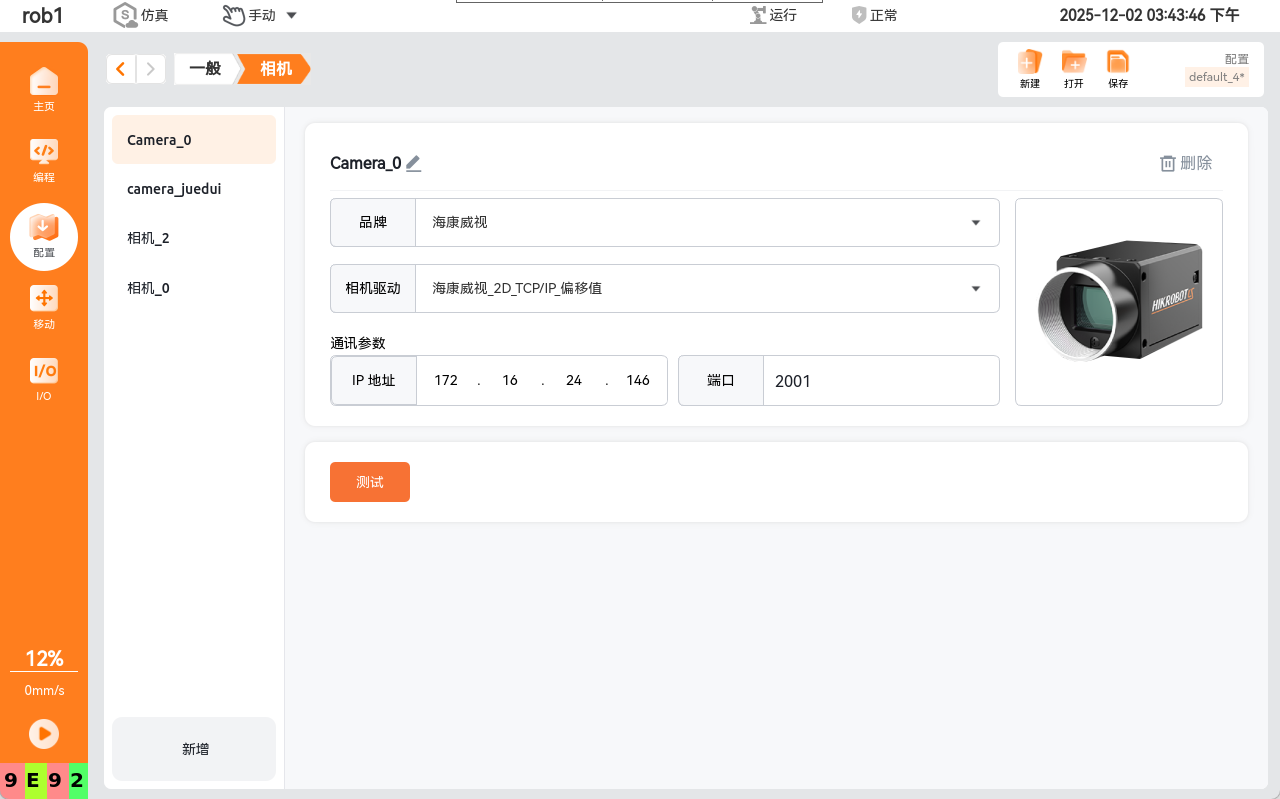
二、相机配置
相机品牌
下拉列表展示目前所支持的相机品牌。
驱动选择
选择当前相机品牌已支持的驱动,分为 2D 和 3D 驱动。
网络配置
设置相机(服务端)通信的 IP 地址以及端口号。
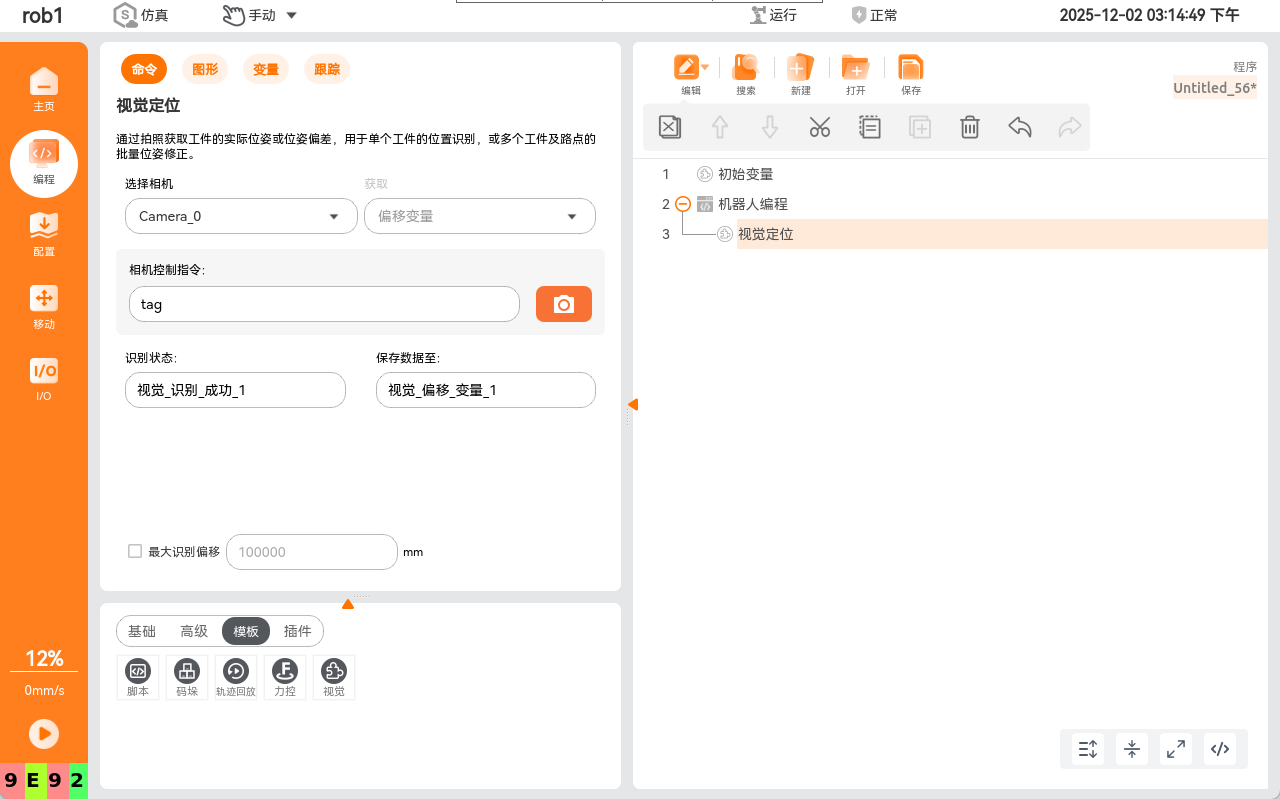
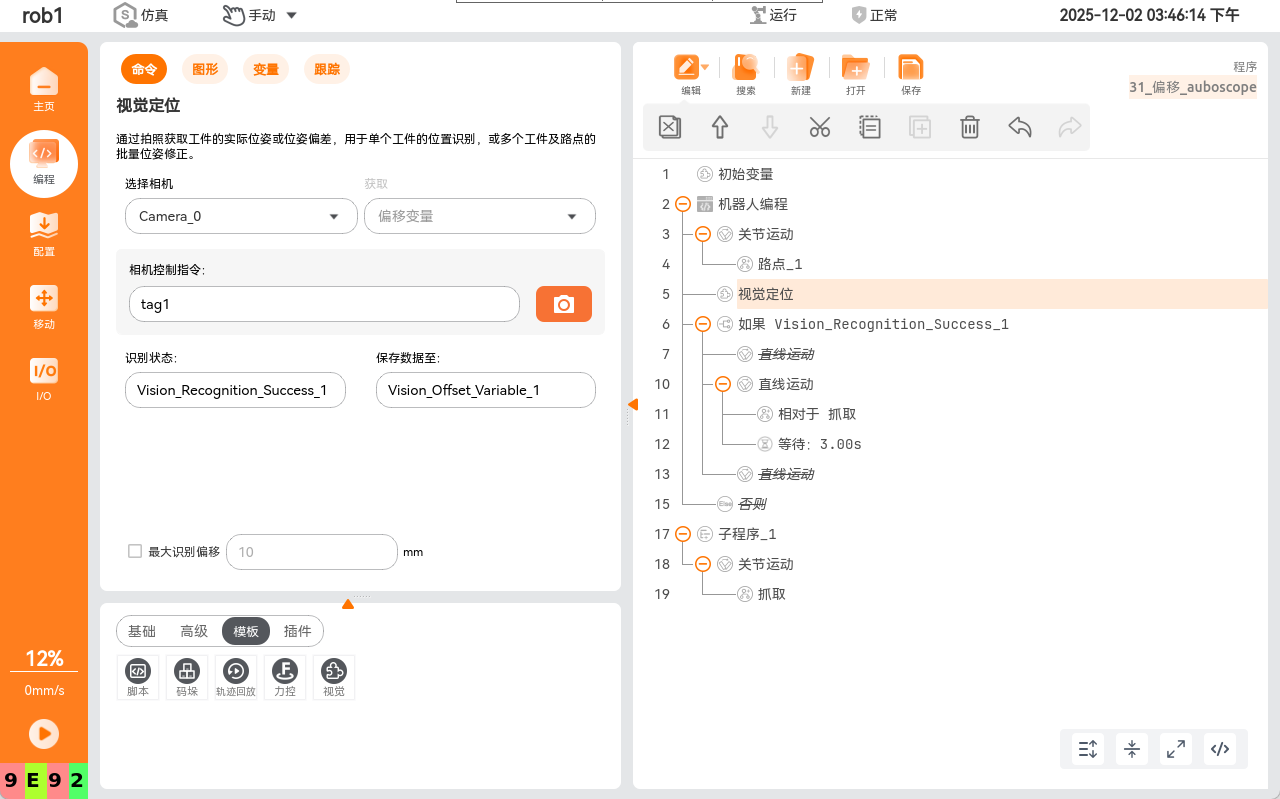
三、视觉节点配置
相机类型
下拉列表展示所有有效配置的相机,分为偏移驱动相机和绝对驱动相机。
变量类型
偏移驱动相机仅可获取偏移变量;绝对驱动相机可获取偏移变量,路点变量。
触发配置
通过指定字符串控制相机,可触发单次执行拍照流程。
变量存储
socket 通信数据存储变量。
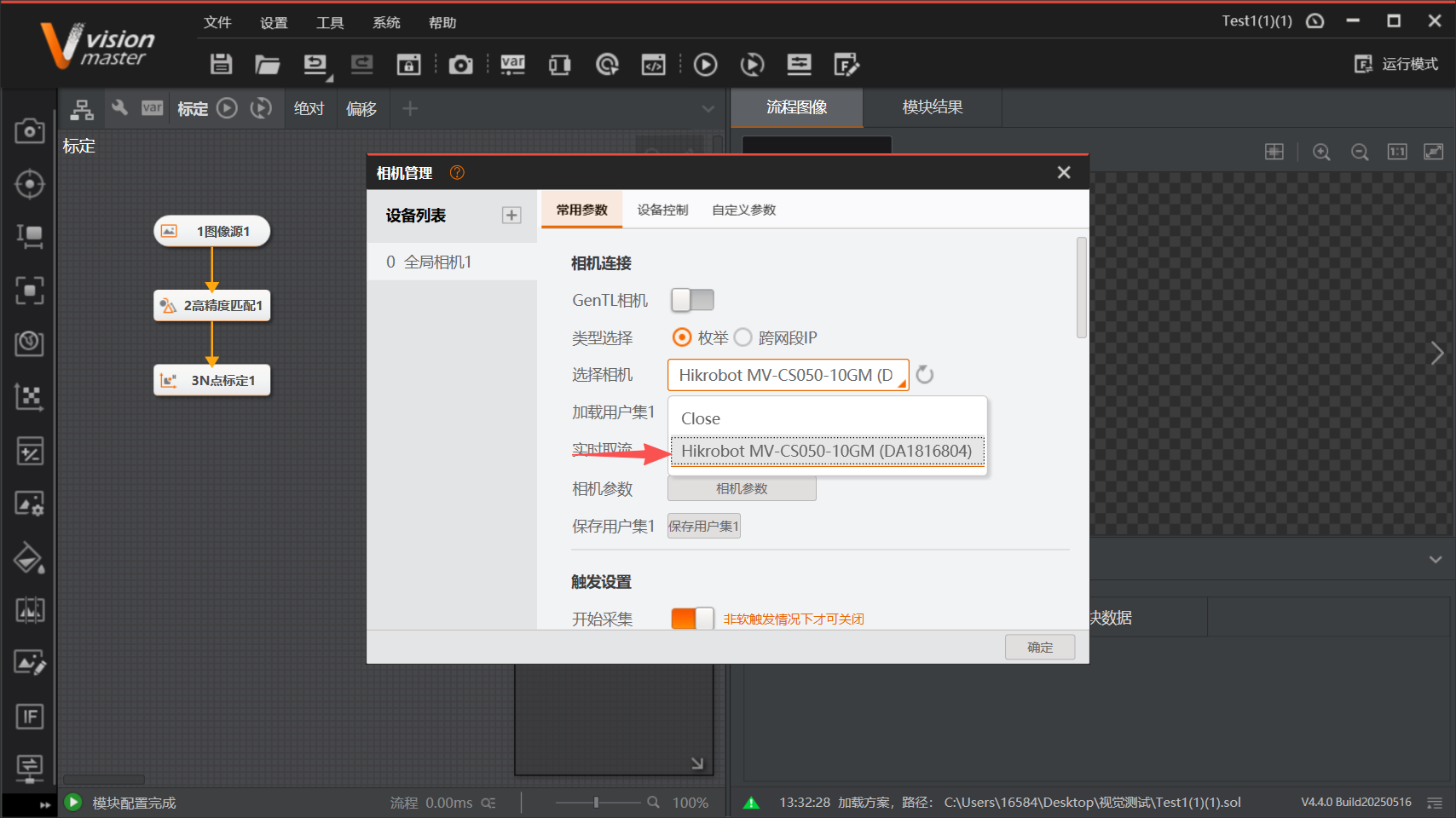
四、视觉识别操作流程(以海康2D相机与梅卡曼德3D相机为例)
海康视觉配置
使用海康指定软件(VisionMaster,以下简称 vm ),连接相机。
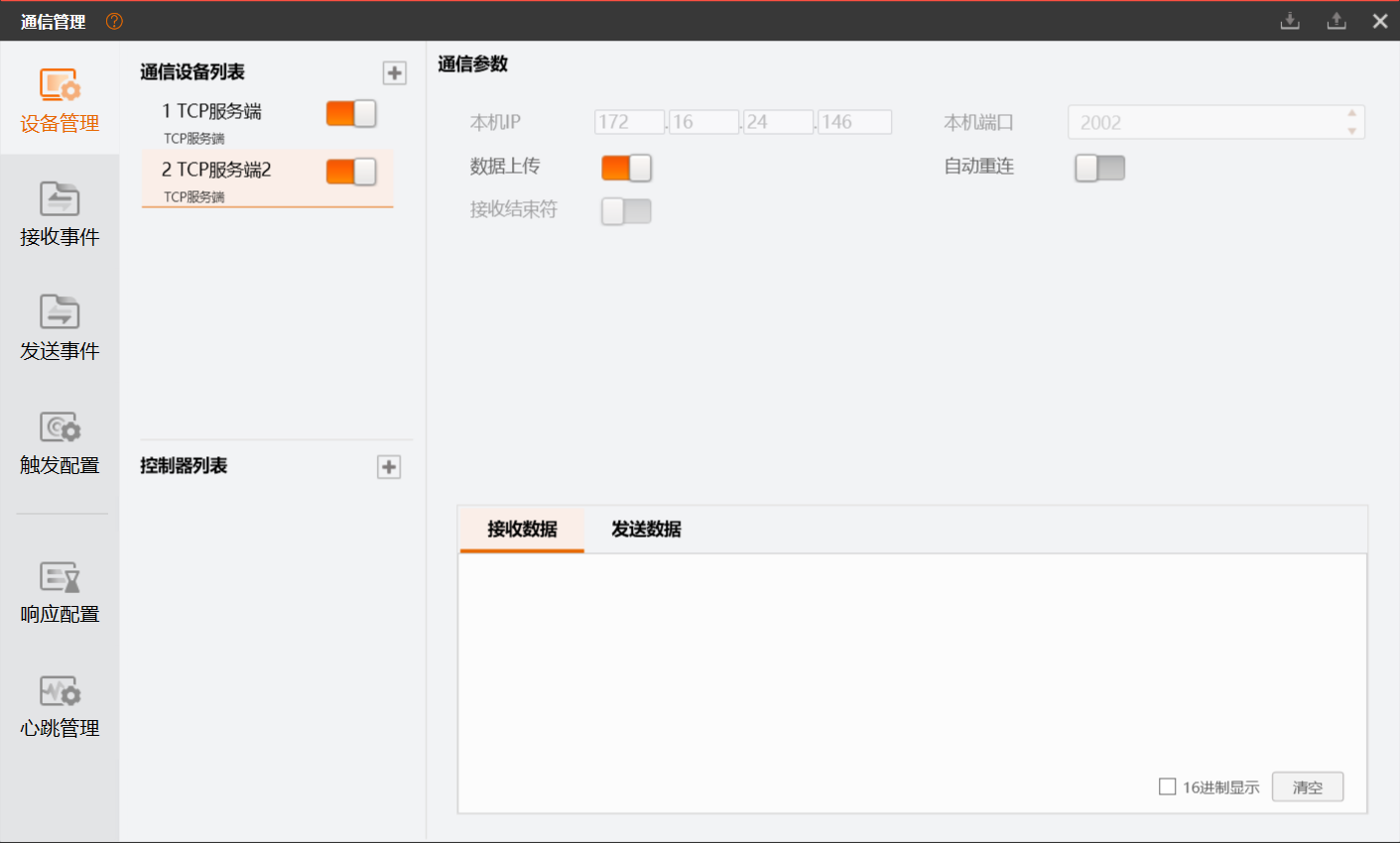
通信管理添加服务端网络信息,完成 socket 通讯,接收与发送字符串。
vm 编写标定物体流程,完成标定操作,并生成标定文件。
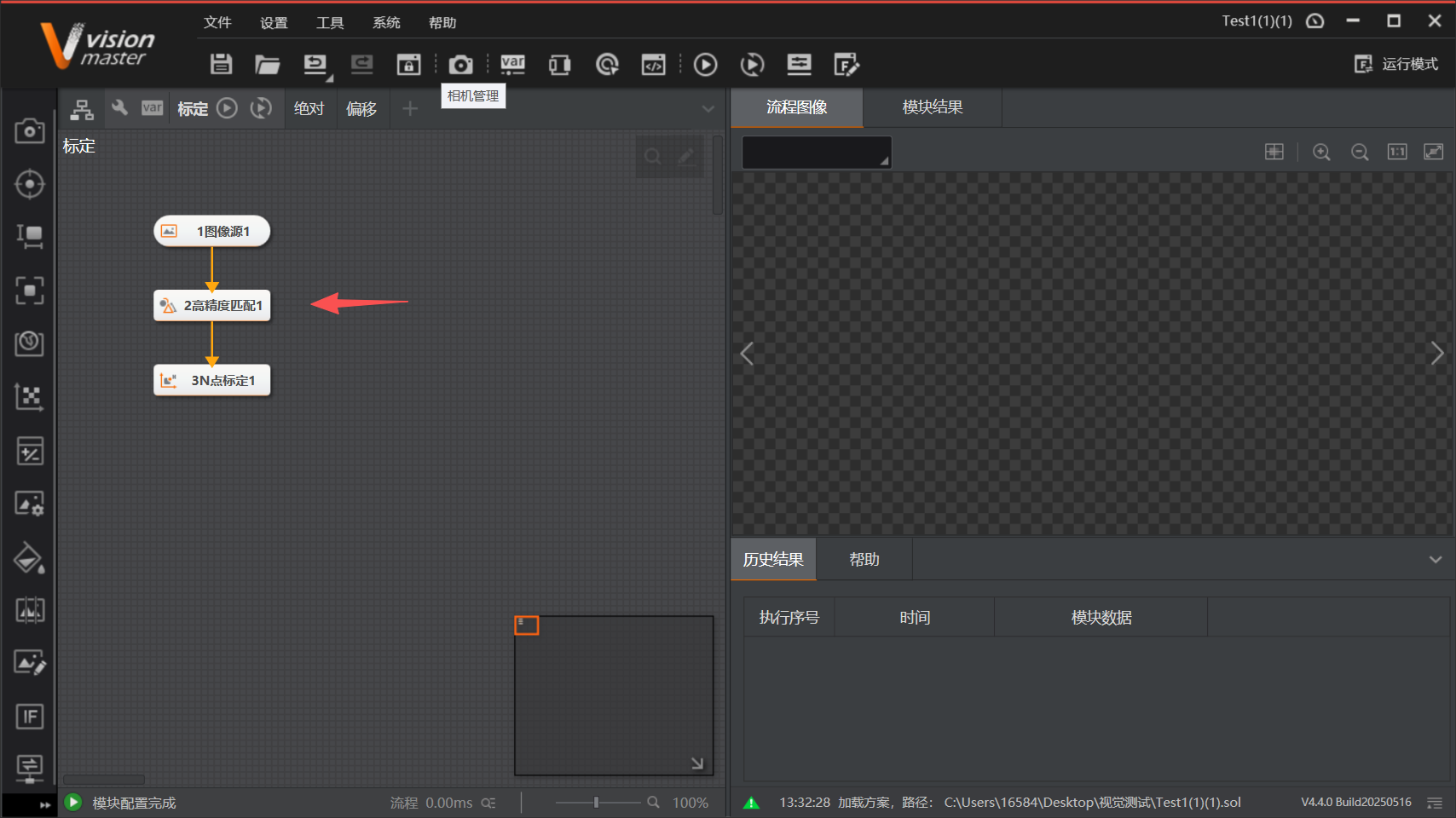
通过 vm 编写图像采集与数据处理流程,并针对预处理环节及返回数据的不同类型(如绝对位置、相对位置),编写对应的识别流程。
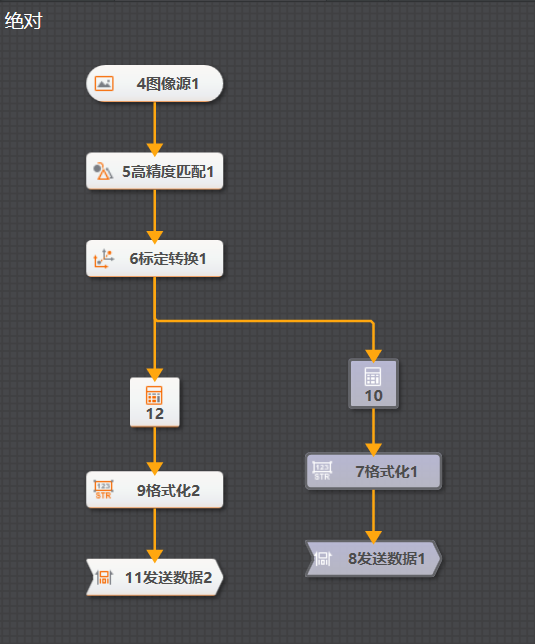
定义触发 vm 识别流程的字符串,用于采集图像、分析数据。

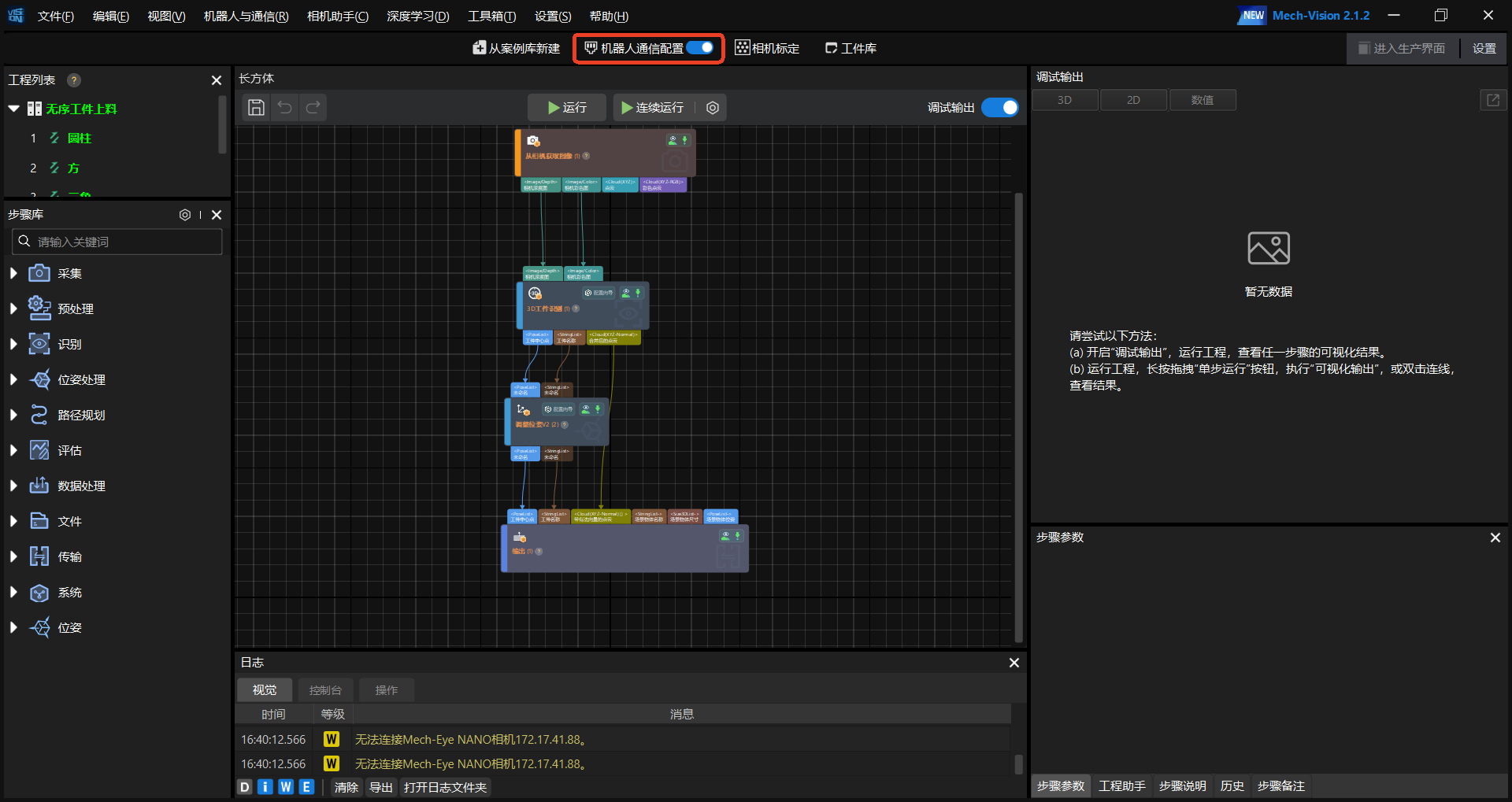
梅卡曼德视觉配置
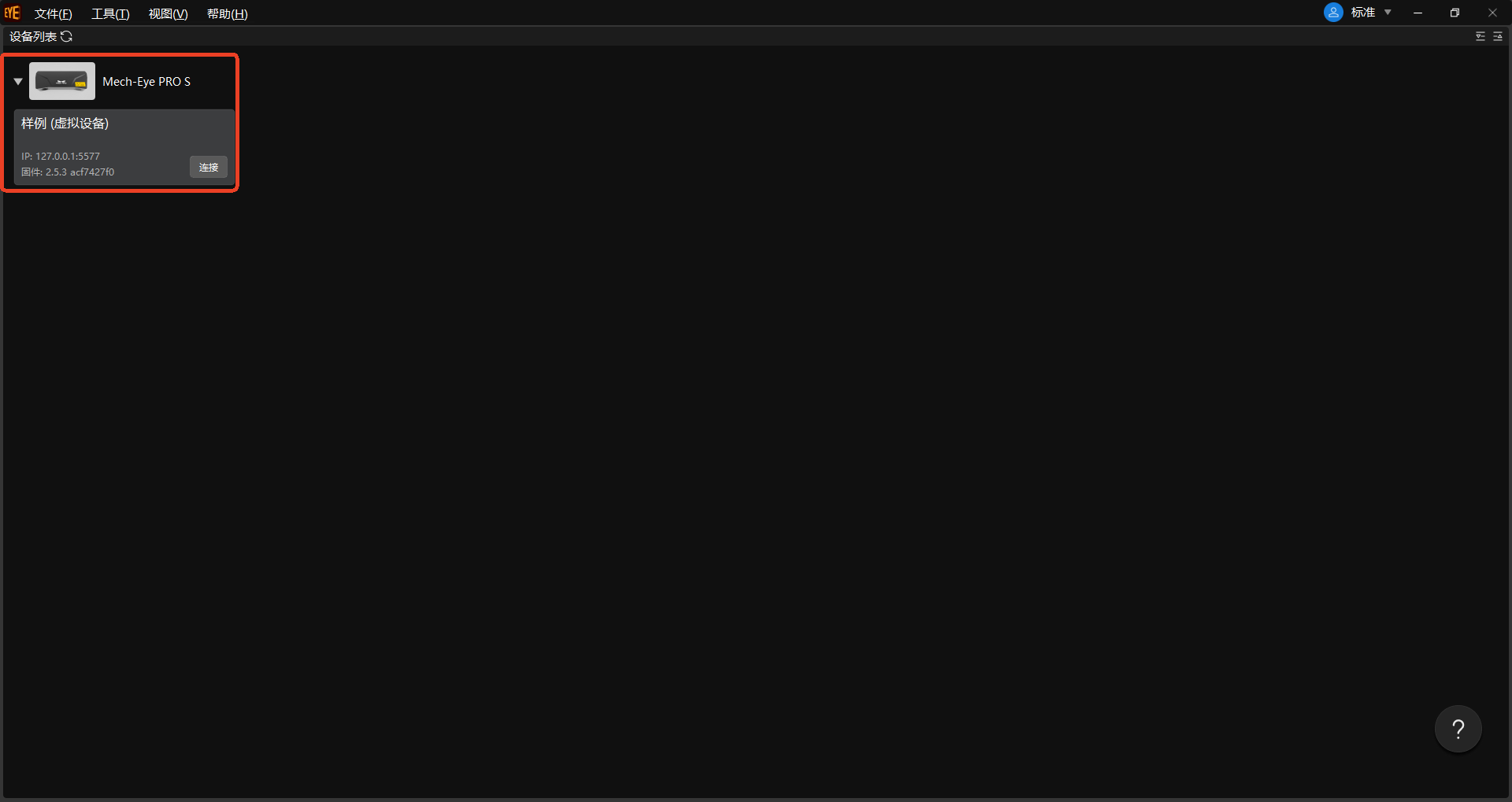
使用 Mech-Eye Viewer ,连接相机
使用 Mech-Vision 编写工件识别流程
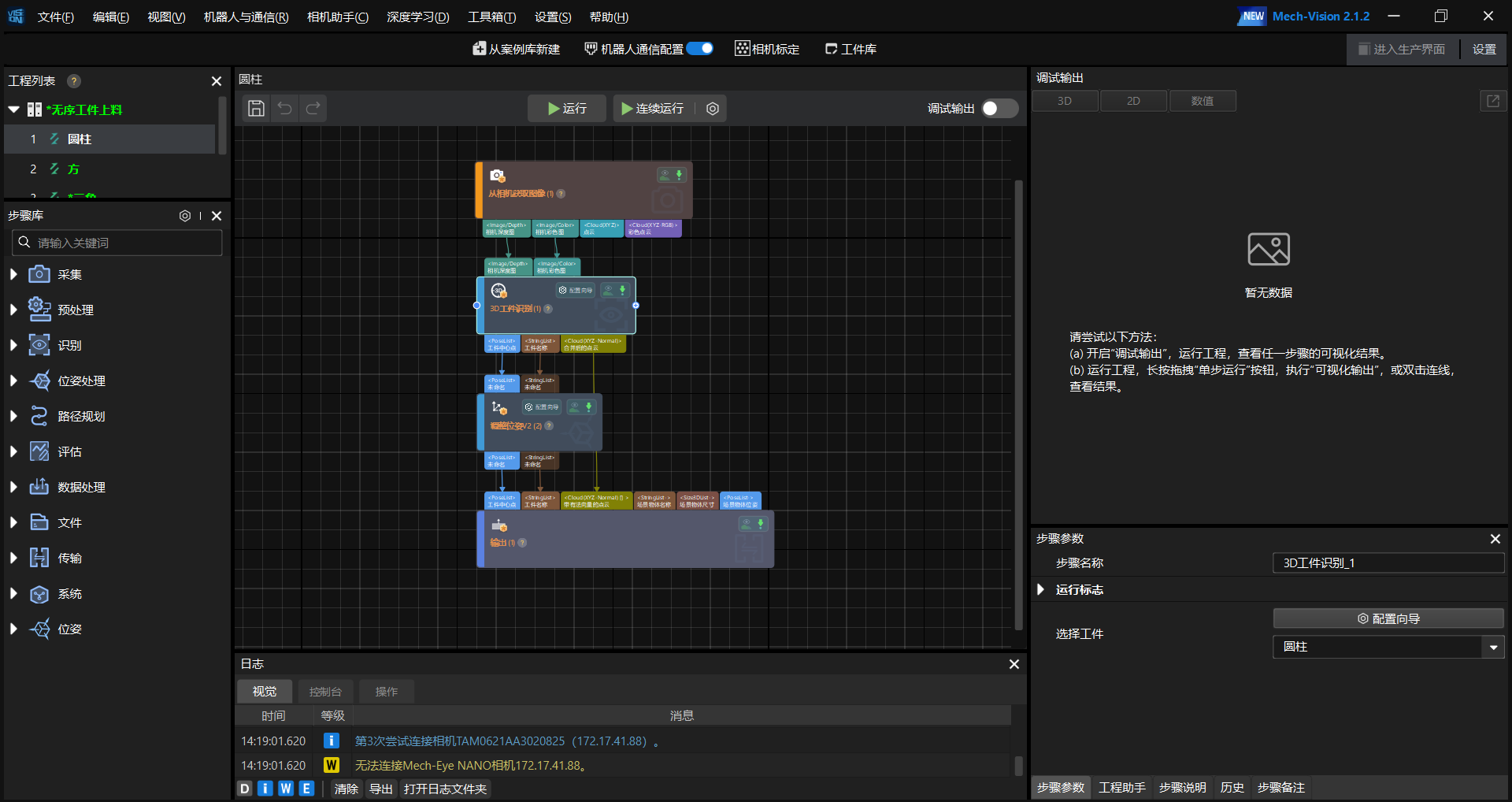
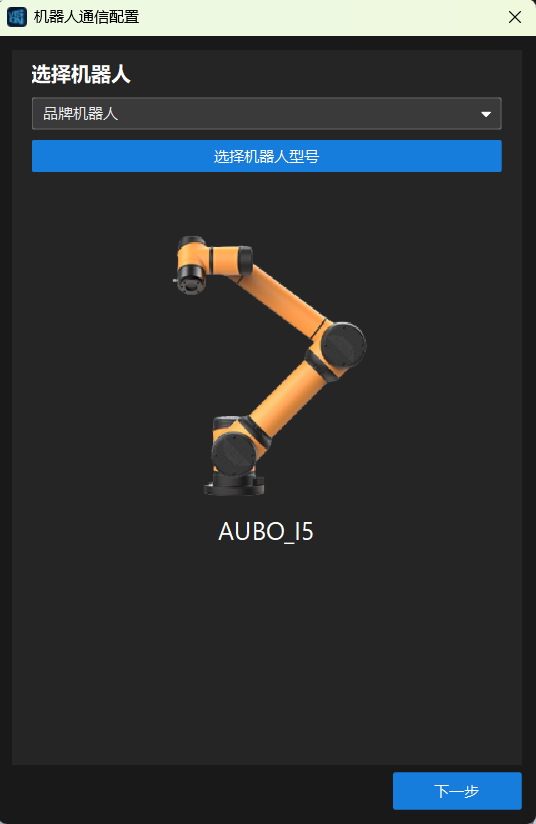
使用 Mech-Vision 设置机械臂类型与主机端口号

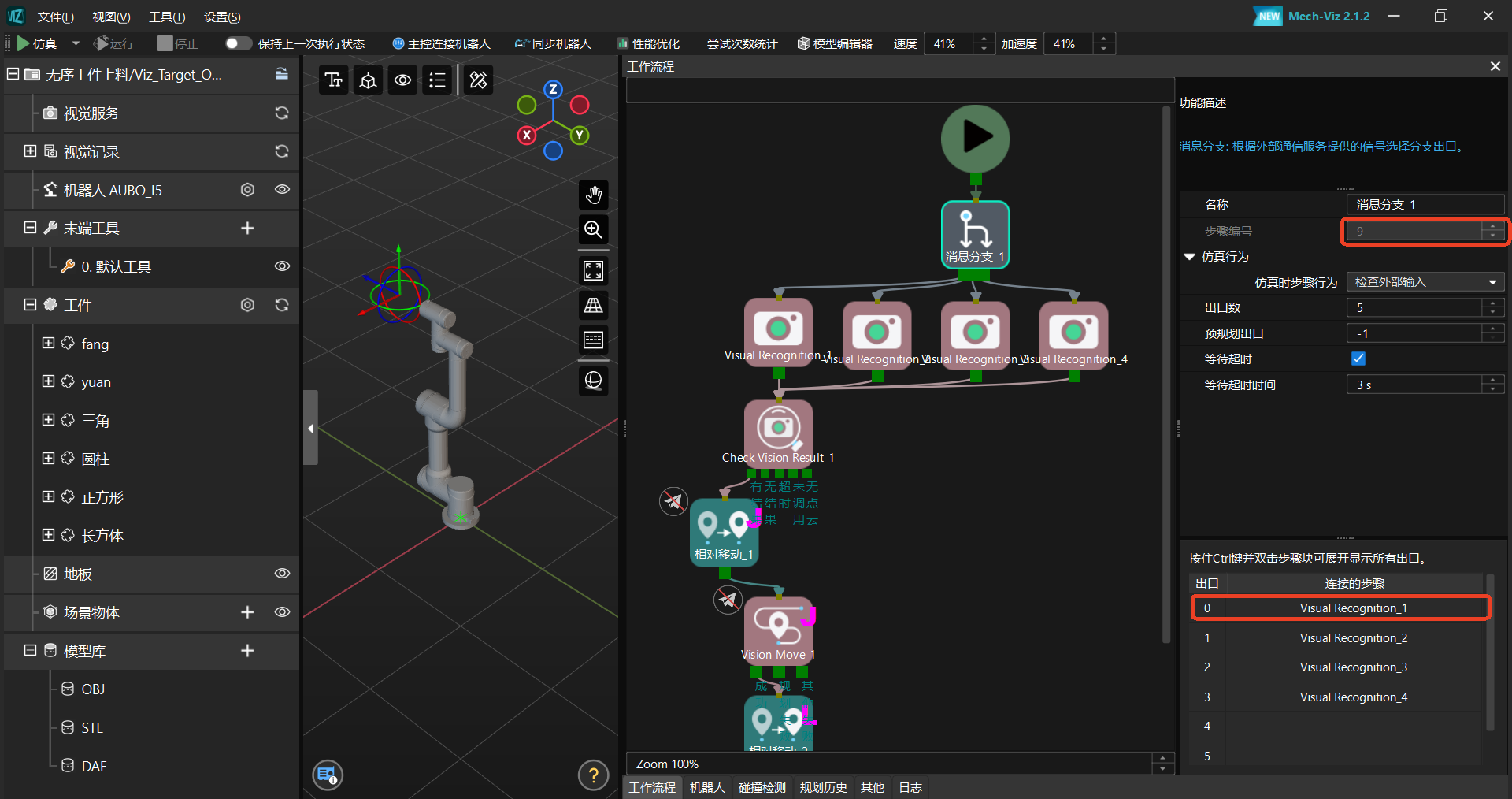
使用 Mech-Viz 定义触发 Mech-Vision 识别流程的分支号,该步骤定义的“分支步骤编号,分支号”为 ARCS 识别字符串,用于采集图像、分析数据。
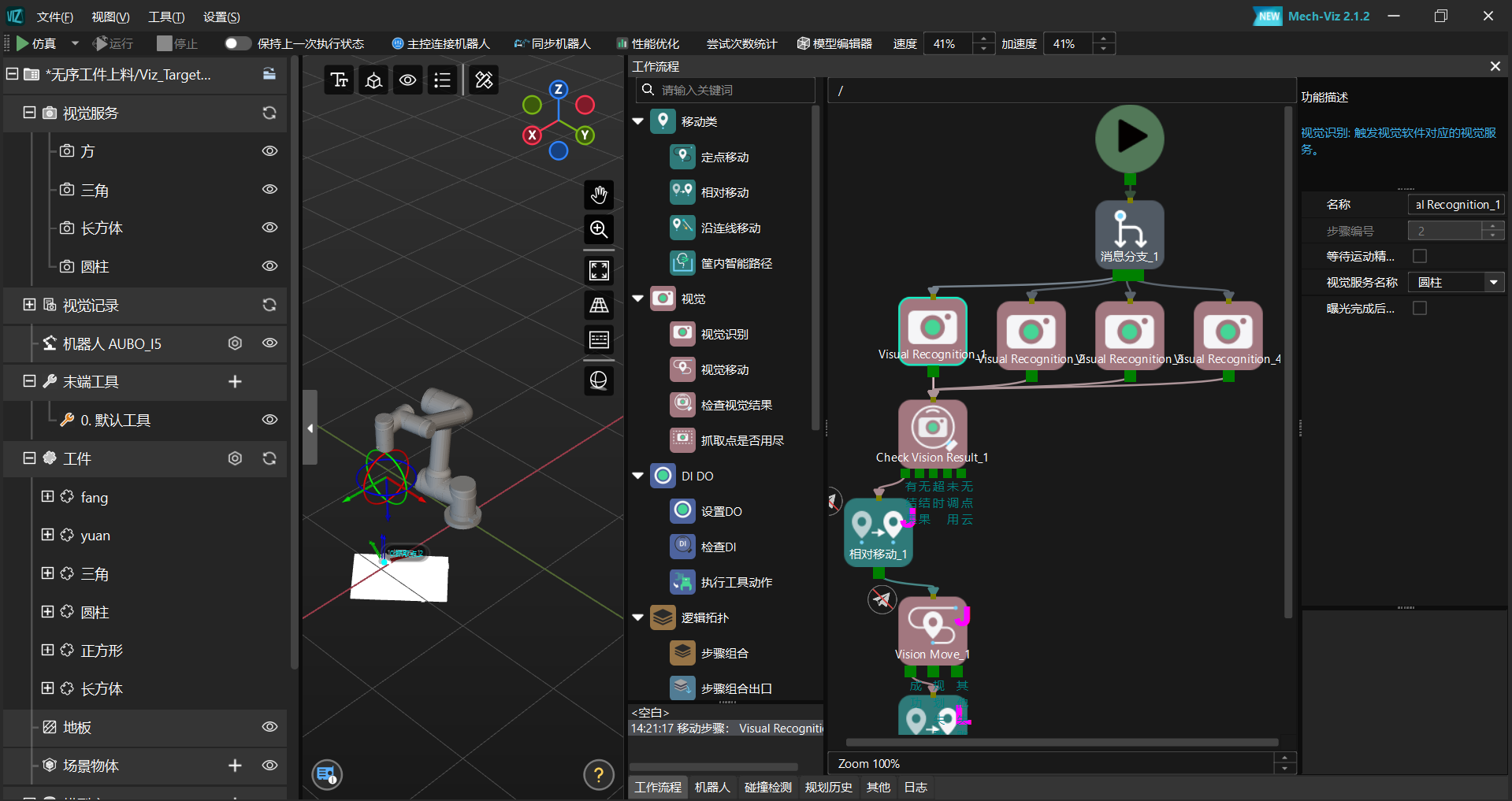
使用 Mech-Viz 编写图像采集与数据处理流程,并针对预处理环节及返回数据的不同类型(如绝对位置、相对位置),编写对应的识别流程。
ARCS 配置
软件打开“配置 > 一般 > 相机”页面,填写服务端设备信息与网络信息后,可点击测试按钮测试网络连通性。
编程部分添加视觉节点,完成相机选择、触发配置以及数据存储变量的定义。

合理应用数据存储变量,编写程序树完成最终视觉抓取(或其他动作)的脚本逻辑,例如下图。
五、注意事项
本指南为通用性指导,具体实施时需根据实际硬件型号、生产环境需求进行调整。建议在正式使用前进行充分的测试验证。