CB-G40 Series Control Box User Manual
1 About this Manual
1.1 Version information
V1.0.0
The User Manual will be regularly checked and corrected, and the updates will be incorporated in the new version. The information in this manual is subject to change without notice.
AUBO (Beijing) Intelligent Technology Co., Ltd. shall not be liable for any errors or omissions in this Manual, or for any accidental or consequential injuries arising from the use of this Manual and the products described therein.
Please read this manual before installing and using the product described herein.
Please keep this manual for the convenience of reading or reference when necessary.
All pictures in this manual are for reference only and the product received serves as the standard.
This Manual is the exclusive property of AUBO (Beijing) Intelligent Technology Co., Ltd. and may not be copied, reproduced in whole or in part, or converted into any other form for use without the written permission of AUBO (Beijing) Intelligent Technology Co., Ltd.
Copyright © 2015-2026 AUBO All rights reserved.
2 Revision
| Version / Time | Description |
|---|---|
| v1.0.0* / 20260605 | v1.0.0* (Trial) released. |
3 Safety
3.1 Introduction
Integrators and users must read this Manual carefully, especially the content with warning signs, which must be mastered and strictly observed. Industrial robot system is complex and potentially dangerous. Users must have a comprehensive safety awareness, deeply understand the possible risks in the operation process, and strictly abide by the industrial robot safety requirements in ISO 10218.
3.2 Warning Signs
The safety-related content in this Manual are indicated by the following warning signs. The content indicated by warning signs in this Manual represent important reminders for personal safety and equipment safety, and users must fully understand and strictly follow them.
| Sign | Description |
|---|---|
 | It indicates a possibly hazardous situation that, if not avoided, could result in death or serious injury. |
 | It indicates a possibly hazardous situation, if not avoided, could result in injury to personnel or major damage to equipment. |
 | It indicates a possibly hazardous situation, if not avoided, could result in injury to personnel or damage to equipment. Attention shall be paid that the hazards indicated by this sign may sometimes cause more significant consequences, depending on the specific circumstances. |
 | It indicates a situation that, if not avoided, could result in injury to personnel or damage to equipment. Attention shall be paid that the hazards indicated by this sign may sometimes cause more significant consequences, depending on the specific circumstances. |
3.3 Safety Precautions
3.3.1 Instructions for Use
When starting the device for the first time, be sure to read and follow the basic safety information in this manual. Other detailed safety instructions are provided in subsequent sections of the manual. However, as a wide range of scenarios may arise during actual operation, this manual cannot cover all prohibited or inadvisable operations.
| Sign | Description |
|---|---|
| 1. Always install the machine and all electrical equipment in accordance with the requirements and specifications herein. 2. Make sure to perform a preliminary test and inspection of the machine and its protection system before using the robot or putting it into production for the first time. 3. Before starting the robot or robot system for the first time, check whether the robot or robot system is in good condition and safe for operation, without any damage detected; and test, with all safety functions covered, whether the currently effective national or local safety production rules and regulations are satisfied. 4. Always check that all safety parameters and user programs are correct and that all safety functions are working properly, which must be done by personnel qualified to operate the robot. Do not start the robot until it has passed the thorough safety test, proving that it reaches the specified safety level. 5. Always get the installation and commissioning performed by professionals according to the installation standards. 6. When the robot is installed, carry out a comprehensive risk assessment again and keep a record therefor. 7. Always get the setting and modification of safety parameters carried out by authorized personnel, and apply security measures such as password or isolation measure to prevent their unauthorized modification or setting. After the safety factor is modified, be sure to analyze the relevant safety functions. 8. In case of an accident or abnormal operation, press down the emergency stop button to stop the robot if necessary. 9. Each joint module of the AUBO series robot is equipped with a brake to maintain the robot posture during power failure. Do not manually switch the power supply system on and off frequently. It is recommended that the time interval between each power-on and power-off operation be more than 10 seconds. 10. The AUBO series robot is equipped with a collision detection function. When an external force applied to the powered-on robot exceeds the normal force range set by the user for safety, the robot will stop automatically to prevent collision injuries to the robot itself or operators. This function is specially designed to ensure safety during human-robot collaborative work for AUBO series robots, provided that the robot system operates within its normal working range and uses an original AUBO series controller. If users develop their own custom controllers, the robot will not support the above function, and users shall bear all hazardous consequences arising therefrom. 11. The controller generates heat during operation. Do not operate or touch the robot when it is working or immediately after it stops. Instead, cut off the power supply and wait for an hour until the robot cools down. 12. Do not put your fingers in the heating part of the controller. |
| 1. Ensure that the machine is correctly and safely installed in place. 2. Ensure sufficient clearance space for free movement of the robot arm. 3. Stop using the robot when it is damaged. 4. Do not connect safety devices to general-purpose I/O interfaces, and instead, please use safety-related interfaces only. 5. Ensure correct installation setup (such as mounting angle of robot body, payload weight in TCP, TCP offset, and safety configuration). Save the installation file and load it into the program. 6. Tools and obstacles shall be free of sharp corners or jagged edges. Ensure that the heads and faces of all personnel stay outside the robot's reachable workspace. 7. Ensure the correct installation and settings. 8. Unregulated movements will release substantial kinetic energy, which can easily generate impact forces when interacting with high-speed payloads. 9. Since connection of different machines may increase the risk or lead to new dangers, always perform a comprehensive risk assessment for the entire installation. When different safety and emergency shutdown performance levels are required, always select the highest one. Always read and understand the manuals of all equipment used in the installation. 10. Do not modify the robot, as any changes to the robot may cause unpredictable danger to the integrator. Carry out robot restructuring with authorization and according to the latest version of all relevant service manuals. If the robot is changed or altered in any way, AUBO (Beijing) Intelligent Technology Co., Ltd. disclaims all liability. 11. Before transporting the robot, check the insulation and protection measures. 12. Follow the transportation requirements when transporting the robot, and handle it carefully to avoid bumps. |
| 1. When the robot is combined with or working together with other machine that can cause robot damage, it is strongly recommended to check all functions of the robot separately. 2. AUBO (Beijing) Intelligent Technology Co., Ltd. shall not be liable for any robot damage or personal injury caused by improper operation. 3. Do not expose the robot to a permanent magnetic field, as strong magnetic fields can damage the robot. |
3.3.2 Operator Safety
Operator safety is the first consideration that must be secured during the operation of the robot system. The general precautions are listed in the table below, and appropriate measures shall be taken to ensure the safety of operators.
| Sign | Description |
|---|---|
| 1. Each operator using the robot system shall be trained through the training courses hosted by AUBO (Beijing) Intelligent Technology Co., Ltd. Users shall fully grasp the safe and standardized operating procedures with the robot operating qualifications. Please inquire for training details via email support@aubo-robotics.cn. 2. Do not wear loose clothes or jewelry when working with the robot systems, and make sure long hair is combed up at the back of the head. 3. When the robot is running, even if it appears to have stopped, it is possible that the robot is waiting for a start signal and in the state of imminent action, and even in such state, the robot should be considered as being in motion. 4. In emergency and abnormal situations, for example, when an operator is caught in or surrounded by a robot, push or pull the robot arm with force to force the joint to move. Manual movement of the robot arm without electric drive is for emergency use only, and may cause damage to the robot arm joint. |
3.4 Responsibilities and Regulations
The AUBO-G40 series controller can be combined with other equipment to form a complete machine and itself is not complete. Therefore, this Manual does not cover the instructions on how to design, install and operate a complete robot, nor does it cover all peripheral equipment that can influence the safety of the complete system. The safety of a complete robot installation depends on its integration. The integrator shall conduct risk assessment on the design and installation of the complete system in accordance with laws, regulations, safety codes and standards where the robot is installed. Risk assessment is one of the most important tasks that an integrator must be done. Guidance on the risk assessment process may be found in the following standards.
ISO 12100:2010 Safety of Machinery - General Principles for Design - Risk Assessment and Risk Reduction;
ISO 10218-2:2025 Robots and Robotic Devices - Safety Requirements for Industrial Robots - Part 2: Robot Systems and Integration;
RIA TR R15.306-2014 Technical Report - Industrial Robots and Robot Systems - Safety Requirements - Task-based Risk Assessment Methodology;
ANSI B11.0-2010 Safety of Machinery; General Requirements and Risk Assessment;
The responsibilities to be fulfilled by an integrator include but are not limited to:
comprehensive risk assessment of complete robot system;
confirmation of the correctness of the system's design and installation;
provision of training to users and staff;
development of the operation specification of the complete system with specific operation process defined;
development of appropriate safety measures;
adoption of appropriate methods to eliminate hazards or minimize any hazards to an acceptable level at the time of final installation;
communication of residual risks to end users;
marking of the integrator's logo and contact information on the robot;
archiving of relevant technical documents.
For applicable standards and laws, please visit: www.aubo-robotics.cn.
All safety information contained herein shall not be regarded as a guarantee from AUBO (Beijing) Intelligent Technology Co., Ltd. It should be understood that, even if all safety instructions referred to herein are observed, personal injury or equipment damage is still likely to occur.
AUBO (Beijing) Intelligent Technology Co., Ltd. is committed to continuously improving the reliability and performance of its products, and therefore reserves the right to upgrade products without notice. AUBO (Beijing) Intelligent Technology Co., Ltd. will make every possible effort to ensure the accuracy and reliability of the information in this manual, but shall not be liable for any errors or omissions therein.
3.5 Hazard Identification
Risk assessment shall account for all potential contact scenarios between operators and the robot during normal operation, along with foreseeable misoperations. The operator's neck, face and head shall be kept covered to avoid impact contact. If the robot is to be operated without peripheral safety guarding devices, a risk assessment must first be performed to judge whether relevant hazards will lead to unacceptable risks, such as:
The use of sharp end effectors or tool connectors may present hazards;
Handling toxic or other harmful substances may present hazards;
Operators' fingers face pinching risks from the robot base or joints;
Hazards caused by collisions with the robot;
Hazards stemming from insufficient fixation of the robot or end-mounted tools;
Hazards generated by impacts between the robot payload and rigid surfaces.
The integrator shall evaluate such hazards and their corresponding risk grades through risk assessment, then define and implement matching countermeasures to reduce risks down to an acceptable level. Please note that individual robot units may have other significant unlisted hazards.
By combining the inherent safety design measures built into AUBO robots with safety protocols and risk assessments executed by integrators and end users, risks linked to collaborative operation of AUBO series robots shall be minimized to the lowest reasonably practicable extent. This document relays all residual risks of the robot (prior to installation) to integrators and end users. If an integrator's risk assessment identifies hazards within a specific application that would expose users to unacceptable risks, the integrator must deploy suitable risk-reduction measures to eliminate or greatly mitigate those hazards until risks reach an acceptable threshold. Operation is unsafe until adequate risk-reduction measures (where applicable) are put in place.
For non-collaborative robot installations (for instance, when hazardous tools are deployed), risk assessment may determine that the integrator must wire in extra safety hardware (such as safe-start devices) during programming to safeguard personnel and equipment.
3.6 Emergency Response
3.6.1 Emergency Stop Device
Pressing the emergency stop button will immediately stop all motions of the robot. Emergency stop is not intended as a risk reduction measure, but as a secondary protection device. When multiple emergency stop buttons are to be connected, they must be included in the risk assessment of robot application. The emergency stop button meets the requirements of IEC 60947-5-5.
The controller is also equipped with an external emergency stop button interface (as shown), which can be used by the integrator or user according to the actual situation.
| Sign | Description |
|---|---|
| Tooling or equipment connected to the end of the robot arm must be integrated into the emergency stop circuit of the system if they pose a potential threat. Failure to comply with this warning may result in death, serious personal injury or major property damage. |
3.6.2 Recovery from Emergency Stop State
All emergency stop devices designed in the form of a button feature a "lock", which must be unlocked to end the emergency stop state.
The "lock" can be unlocked by rotating the emergency stop button.
| Sign | Description |
|---|---|
| Recovering from the emergency stop state is a simple but very important step, which can be operated only when the danger of the robot system is confirmed to be completely eliminated. |
4 Handling and Precautions
When packaging for transportation, package the robot in compliance with packaging standards and make required markings on the outer side of the packaging box. During transportation, ensure the robot stays stable and firmly fixed in a proper position.
Lift the controller by its handle. When hoisting the robot, adopt proper measures to secure moving parts, so as to prevent unexpected movement during hoisting and transportation that may cause damage.
Transfer the robot from packaging materials to the installation position. Power on the robot after complete fixation and verify its normal operating status.
Keep the original packaging intact after transportation. Store packaging materials in a dry area for future repacking and robot relocation as needed.
| Sign | Description |
|---|---|
| 1. Make sure that your back or other body parts are not overloaded when lifting the equipment. 2. Follow all regional and national guidelines. AUBO (Beijing) Intelligent Technology Co., Ltd. shall not be responsible for any damage arising from improper transportation. 3. Make sure that the robot is installed in strict accordance with the installation instructions in the manual. |
5 Maintenance And Disposal
5.1 Maintenance
Maintenance operations must be done in strict accordance with all safety instructions herein.
The maintenance, calibration and repair work must be performed according to the latest service manual, which is available on the website: www.aubo-robotics.cn. All dealers of AUBO (Beijing) Intelligent Technology Co., Ltd. are authorized to access this website.
Maintenance must be carried out by an authorized system integrator or AUBO (Beijing) Intelligent Technology Co., Ltd. Parts shall be returned to AUBO (Beijing) Intelligent Technology Co., Ltd. in accordance with the instructions in service manual.
The maintenance must be carried out with the specified safety level secured and according to the currently effective national or regional work safety regulations, and all safety functions shall be tested for normal working.
The maintenance is intended to secure the normal operation of the system or to recover a faulty system to normal. Maintenance includes fault diagnosis and repair.
The following safety procedures and precautions must be followed to operate the robot arm or controller:
| Sign | Description |
|---|---|
| 1. Disconnect the main input cable from the back of the controller to ensure that it is completely powered off. Take necessary measures to prevent authorized personnel from re-connecting the power supply to the system during maintenance. After the power supply is cut off, check the system again to ensure that it is powered off. 2. Check the ground connection before restarting the system. 3. Follow the ESD (electrostatic discharge) regulations when disassembling the robot arm or controller. 4. Avoid disassembling the power supply system of the controller. Pay attention that the power supply system of the controller will remain at high voltage for several hours after the controller is turned off. 5. Prevent water or dust from entering the robot arm or controller. |
5.2 Disposal
AUBO robot must be disposed of in accordance with applicable national laws and regulations and national standards.
6 Warranty
6.1 Warranty
CB-G40 Controller features a limited warranty period of 18 months.
If the new equipment or any of its component exhibits defects resulting from poor manufacturing and/or material within 18 months from the start of use, AUBO (Beijing) Intelligent Technology Co., Ltd. shall provide the necessary spare parts for replacement or repair.
AUBO (Beijing) Intelligent Technology Co., Ltd. has the ownership of the equipment or components replaced or returned to the AUBO (Beijing) Intelligent Technology Co., Ltd.
When the warranty expires, AUBO (Beijing) Intelligent Technology Co., Ltd. reserves the right to charge the customer for replacement or repair.
If the equipment is defective outside the warranty period, AUBO (Beijing) Intelligent Technology Co., Ltd. shall not be liable for any damage or loss arising therefrom, such as production loss or damage to other production equipment.
6.2 Disclaimer
The warranty will be invalid if the defect is caused by improper handling or failure to follow the relevant information in the User Manual.
Faults caused by the following conditions are not covered by this warranty:
Purchase of products through channels not approved by AUBO;
Failure to perform installation, wiring and connection of other control device in accordance with industrial standards or the requirements in the User Manual;
Use of this product beyond the nominal specifications or standards;
Use of this product for purposes other than those specified;
Use of this product in environmental conditions out of the nominal settings;
Use of this product in a grinding environment or a special use environment without protection;
Product damage due to improper transportation;
Failure, damage or consequential damage caused by accidents or human factors;
Failure, damage or consequential damage caused by modification;
Use of non-genuine parts and accessories;
Damage caused by modification, commissioning or repair of original parts by a third party other than AUBO (Beijing) Intelligent Technology Co., Ltd. or its designated integrator;
Failure, damage or consequential damage caused by natural disasters or other force majeure;
Faults not related to the responsibility of AUBO (Beijing) Intelligent Technology Co., Ltd., apart from those mentioned above.
Warranty will not be provided in following circumstances:
Failure to identify product traceability number.
Failure to identify the date of manufacture or the warranty start date.
Changes to software or internal data.
Failure to reproduce the fault or failure to identify the fault by AUBO (Beijing) Intelligent Technology Co., Ltd.
Use of this product in radioactive equipment, biological test equipment or in other dangerous applications ascertained by AUBO (Beijing) Intelligent Technology Co., Ltd.
Appearance parts and wearing parts.
According to the warranty agreement, AUBO (Beijing) Intelligent Technology Co., Ltd. will only provide warranty services for defects and deficiencies of the products and parts sold to dealers.
AUBO (Beijing) Intelligent Technology Co., Ltd. shall not be liable for any other express or implied warranties or liabilities, including but not limited to any implied warranties for merchantability or fitness for a specific use. In addition, AUBO (Beijing) Intelligent Technology Co., Ltd. shall not be liable for any indirect damage or consequences of any kind arising from the relevant products.
7 Description of Control Boxes
7.1 Introduction
The CB-G40 is AUBO's standard controller of the G series, a flagship new-generation model designed for fixed workstations, production line integration, and medium-to-high load industrial applications. Equipped with dual communication protocols—EtherCAT and CAN—it offers full compatibility with all currently available AUBO products. It supports a dual-voltage power supply platform (48V/96V), enabling efficient driving of standard and heavy-load robotic arms. Matched with a unified Android teach pendant system, it allows free switching between wired and wireless teach modes.

7.2 Safety Instructions
| Sign | Description |
|---|---|
| 1. There are 100V ~ 240V AC and 96V DC dangerous voltage in the controller. Non-professionals must not open the controller with power on. 2. Do not directly touch the fastening screws and other metals inside the controller with the hands, and do not remove the wires with power on. |
| Pre-operation Precautions: 1. Verify that the power cable of the controller is properly connected. 2. Check the connection integrity between the controller and the robot. 3. Ensure the controller support is firmly fixed, level and free of wobble. 4. Hazardous voltage exists inside the cabinet. Non-professional personnel must not open the cabinet while powered on. |
| The software of this robot system only supports upgrade and operation of the default official software. Installation of third-party software such as ROS system is prohibited. If you need to install other software, please deploy it on an external platform instead. |
7.3 Controller Panel Introduction
7.3.1 Controller Front Panel

| No. | Name | Function |
|---|---|---|
| 1 | Power On/Off Button (Power Status Indicator Light) | Power On: When the device is powered off, press and hold the power key for 2 seconds then release. Power Off: When the device is running normally, press and hold the power key for 2 seconds then release. Forced Shutdown: Under any operating state of the device, press and hold the power key for 10 seconds; the device will cut off power and shut down immediately. Power Status Indicator Light: Off when powered off; flashing slowly at 1Hz during boot-up; flashing rapidly at 4Hz when the teach pendant is ready for startup; steady on after the whole unit finishes booting. |
| 2 | Power Status (POWER Indicator Light) | Indicates the connection status of AC/DC power supply. The light stays steadily on when power is connected, and turns off once power supply is disconnected. |
| 3 | Emergency Stop Status Indicator Light | Remains off when no emergency stop signal is present; flashes rapidly at 4Hz upon activation of any emergency stop signal from the controller, teach pendant, handhold device, emergency stop IO, etc. |
| 4 | Operation Status Indicator Light | Remains off when the robot is ready with no motion commands to execute; flashes slowly at 1Hz when the program is paused; stays steadily lit when the robot is executing motions (including program operation and manual jog teaching). |
| 5 | Fault Alarm Indicator Light | Remains off when the system operates normally without faults; stays steadily lit for warning abnormalities; flashes rapidly at 4Hz when a critical fault triggers machine shutdown. |
| 6 | Emergency Stop Button | Press the button to trigger an emergency stop of the robot. Rotate the button in the direction marked on it to restore normal operating status. |
7.3.2 Controller Rear Panel

| No. | Name | Function |
|---|---|---|
| 1 | Teach Pendant Cable Port | Interface for wired teach pendant cable and control handheld device. |
| 2 | ROBOT Port | Cable interface for robot manipulator, used to connect the robot body cable. |
| 3 | Power Switch | Main power switch of the controller. |
| 4 | Power Cord Port | Power supply interface of the controller unit. |
7.4 Wiring Instructions
7.4.1 Robot Cable Wiring
First, insert the aviation plug of the robot body cable into the ROBOT port of the controller, then fasten the buckles on both sides. The detailed operation is shown in Figure 7-4.

7.4.2 Teach Pendant Wiring
Connect the teach pendant cable to the teach pendant port of the controller as shown in Figure 7-5. The wiring method for the wired teach pendant is identical to that of the handheld unit.

7.4.3 Power Wiring
The rated input voltage of the controller is 100V–240V AC. When the power is cut off, first remove the red dust cap on the controller port, then plug the power cable into the POWER port of the controller. Pay attention to the insertion direction; the connector will lock automatically once fully seated. The detailed operation is shown in Figure 7-6.

7.5 Power-On
Place the controller in an appropriate position.
Complete cable connections for the controller following the instructions in the preceding chapters.
Verify all cables of the controller are securely connected (including teach pendant, power supply, robot arm cables, terminal blocks, etc.).
Plug in the power cord and flip on the power switch; the POWER indicator on the front panel of the controller will light up.
Press and hold the power button on the wired teach pendant to wait for system boot-up.
After the teach pendant finishes startup, its power status indicator illuminates. You may now power on and operate the robot arm normally.
7.6 Power-Off
Normal Power-Off Methods
Method 1: Press and hold the controller power button for 2 seconds, toggle off the power switch, then disconnect the power cord.
Method 2: Click the [Shutdown] button on the teach software interface, toggle off the power switch, then disconnect the power cord.
Method 3: Press and hold the power button on the control handle, toggle off the power switch, then disconnect the power cord.
Forced Power-Off
Method 1: Press and hold the controller power button for 10 seconds.
Method 2: Press and hold the power button on the teach pendant for 10 seconds.
Method 3: Press and hold the power button on the control handle for 10 seconds.
Method 4: Unplug the power cord directly or turn off the power switch immediately.
| Sign | Description |
|---|---|
| 1. Do not shut down the system by unplugging the power cord directly from the socket; this may corrupt the robot's file system and cause malfunctions. |
8 Electrical Interfaces
8.1 Overview
The CB-G40 controller is equipped with a full range of electrical interfaces to meet the requirements of diverse automation application scenarios. Integrated with video output, communication, as well as digital/analog signal interfaces, the controller enables extensive system integration and device interconnection. Refer to Table 8-1 for a summary of terminal interfaces.
| Interface Type | Category | Interface Name | Terminal No. | Qty. | Spec. |
| Digital I/O | Fixed-Function I/O | External Safety Stop Input | SI0, SI1 | 2 | 24VDC |
| Interlock Emergency Stop Input | EI0, EI1 | 2 | 24VDC | ||
| Remote Power-On | RMT ON | 1 | 24VDC | ||
| Remote Power-Off | RMT OFF | 1 | 24VDC | ||
| Configurable I/O (Safety) | Digital Input | CI00~CI07, CI10~CI17 | 16 | 24VDC | |
| Digital Output | CO00~CO07, CO10~CO17 | 16 | 24VDC | ||
| General-Purpose I/O (User) | Digital Input | DI00~DI07, DI10~DI17 | 16 | 24VDC | |
| Digital Output | DO00~DO07, DO10~DO17 | 16 | 24VDC | ||
| Analog I/O | General-Purpose I/O (User) | Analog Voltage Input | AI0, AI1 | 2 | 0~+10V |
| Analog Voltage Output | AO0, AO1 | 2 | 0~+10V, 0~20mA | ||
| Communication Interface | - | RS485 | 485_A, 485_B | 2 | - |
| Encoder Interface | - | Incremental Encoder | ENC A+, ENC A-, ENC B+, ENC B-, ENC Z+, ENC Z- | 6 | Differential Signal |
8.2 Electrical Warnings and Precautions
When designing, installing, and deploying applications of the robot and G40 controller, you must strictly abide by the following warnings and precautions. These warnings and precautions shall also be observed during all maintenance work.
| Sign | Description |
|---|---|
| 1. Please ensure that all equipment that shall not be exposed to water is kept dry. If water enters the product, cut off the power supply and contact your supplier. 2. Only use the original cable of the robot. Do not use the robot in applications where the cable needs to be bent. If longer cable or flexible cable is required, contact your supplier. 3. All GND connectors mentioned in this document are only applicable to power supply and signal transmission. For protective earthing (PE), use the screw connector marked with the earthing mark in the controller. The grounded connector shall have a current rating of at least the highest current in the system. 4. Be careful when installing the robot I/O interface cable. |
| 1. Never connect safety signals to a non-safety PLC with an inappropriate safety level. Failure to observe this warning may result in serious injury or even death due to the failure of a safety stop function. 2. During the wiring of the controller electrical interfaces, the controller must be powered off. |
| 1. Interference signals above the level specified in the IEC standard will cause abnormal behavior of the robot. High or excessive exposure to this signal level will cause permanent damage to the robot. EMC problems usually occur during welding and are usually indicated by error messages in the log. AUBO (Beijing) Intelligent Technology Co., Ltd. shall not be liable for any loss caused by EMC problems. 2. The length of I/O cable used to connect the controller to other machinery and equipment shall not exceed 30 m, unless extended testing demonstrates feasibility. |
8.3 Communication Interface
8.3.1 RS485 Interface
The CB-G40 controller is equipped with a standard RS485 interface for connecting Modbus devices. The pin definitions are shown in Figure 8-1.
8.3.2 USB Interface
The CB-G40 series controller provides two standard interfaces of USB2.0 and USB3.0, which can be used for equipment connection, software upgrade and program file export.
8.3.3 LAN Interface
The CB-G40 series controller is equipped with industrial-grade wired Ethernet interface as standard, providing efficient and stable network communication capabilities for robot system, and supporting remote access and control.
8.4 I/O Control Mode
8.4.1 Signal Level Control
The CB-G40 series control box provides NPN and PNP level control modes, which are preset and marked at the factory, as shown in Figure 8-2.
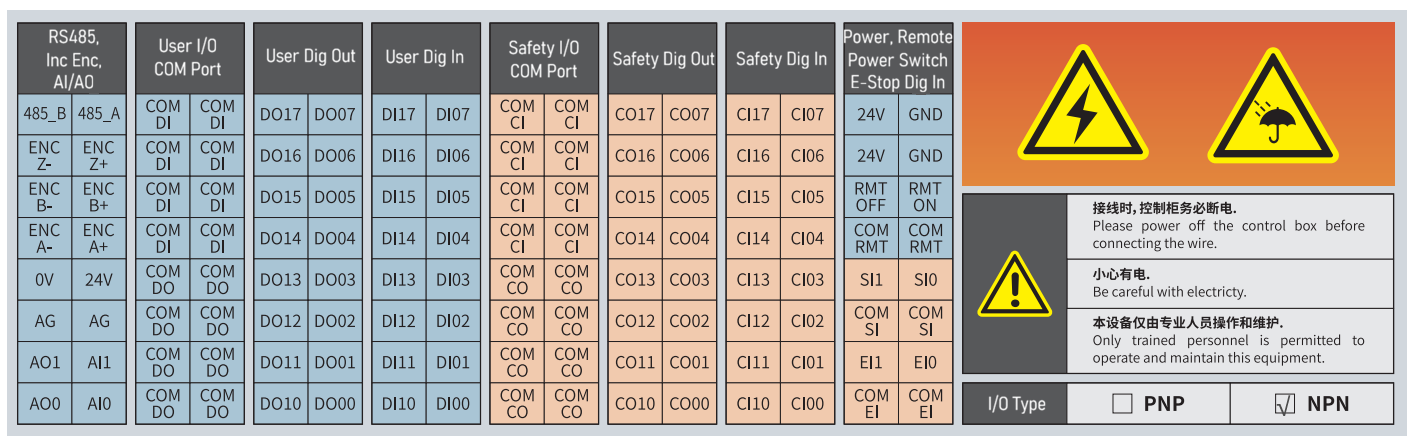
| Sign | Description |
|---|---|
| The level control mode of the controller is professionally configured at the factory. Users must not modify it without authorization to ensure the stability and safety of the system. |
8.4.2 COM Port
The CB-G40 controllers adopt modular COM port architecture and provide refined signal management solutions, as shown in Figure 8-3. The COM port can be divided into two types: input and output types according to signal direction and function attributes. Detailed functions and instructions are as shown in Table 8-2.
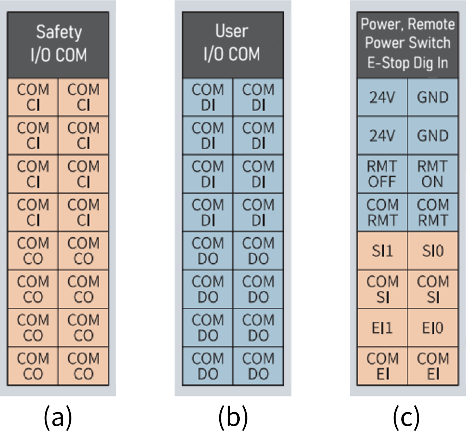
(a) Configurable COM port; (b) General I/O COM port; (c) Fixed function I/O COM port
| COM Port | Function | Qty. | Instructions | |
| Input COM | COM SI | External safety stop input common port | 2 | Used in conjunction with external safety stop input |
| COM EI | Linkage emergency stop input common port | 2 | Used in conjunction with linkage emergency stop input | |
| COM RMT | Remote power-on/off input common port | 2 | Used in conjunction with remote power-on/off input | |
| COM CI | Configurable I/O input common port | 8 | Used in conjunction with configurable I/O input | |
| COM DI | General I/O input common port | 8 | Used in conjunction with common I/O input | |
| Output COM | COM CO | Configurable I/O output common port | 8 | Used in conjunction with configurable I/O output |
| COM DO | General I/O output common port | 8 | Used in conjunction with general I/O output | |
| Sign | Description |
|---|---|
| 1. The I/O valid level mode is pre-configured at the factory, and the user shall carefully check the I/O type mark inside the controller. 2. Whether NPN or PNP signal level control is used, the valid level of the input and output shall follow the factory preset configuration. 3. Under both NPN and PNP signal level control, the COM port shall be consistent with I/O wiring principles. |
8.5 I/O Power Supply
8.5.1 Internal Power Supply
The controller panel I/O defaults to internal power supply mode, as shown in Figure 8-4.
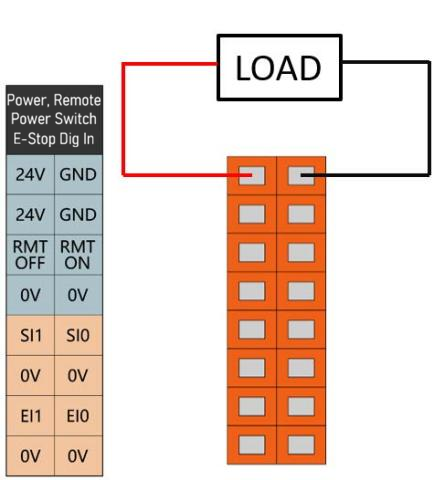
8.5.2 External Power Supply
If the user needs to use an external power supply, please refer to the methods shown in Figure 8-5.
8.6 Fixed Function I/O
8.6.1 Fixed Safety Stop Input
The CB-G40 series controller provides two fixed safety stop inputs:
External safety stop input (SI0, SI1): For safety-type protection devices.
Linkage emergency stop input (EI0, EI1): Only for emergency stop devices, realizing multi-machine linkage emergency stop.
| External safety stop input | Linkage emergency stop input | |
|---|---|---|
| Robot motion stop | Yes | Yes |
| Program execution | Pause | Stop |
| Robot power supply | ON | OFF |
| Reset | Automatic or manual | Manual |
| Operating frequency | Not more than once per operating cycle | Infrequently used |
| Re-initialization required | No | Release brake only |
| Stop category | 2 | 1 |
| Safety input function | Extreme case | ||
|---|---|---|---|
| Detection time | Power-off time | Response time | |
| External safety stop input | 100ms | 1200ms | 1300ms |
| Linkage emergency stop input | 100ms | - | 1200ms |
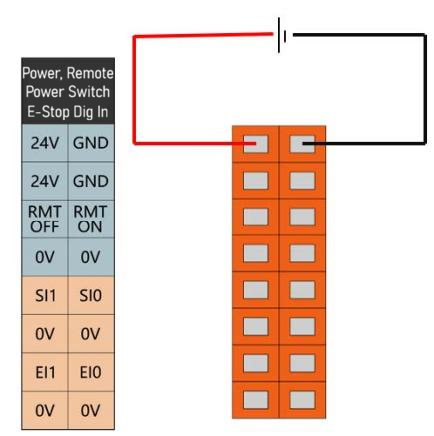
8.6.2 Remote Startup/Shutdown
When the system is in manual mode, the robot system can be powered on or off by using the remote power-on/off control I/O interface.
| Input | Function definition |
|---|---|
| RMT ON | Remote power-on signal input interface |
| RMT OFF | Remote power-off signal input interface |
8.7 Controller Configurable I/O
The CB-G40 series controller provides 16 configurable DI interfaces and 16 configurable DO interfaces. It adopts a dual-circuit safety channel design, which can ensure that the system maintains safety functions in case of a single fault.
The configurable I/O can only be used as safety I/O after it is configured in teach pendant software. If it is not configured, the default is general digital I/O. Safety I/O always has the highest priority. When the same I/O port is configured with both safety I/O and general I/O functions, the system will give priority to the safety I/O function. For detailed functions and instructions on the safety I/O, please refer to the AuboStudio User Manual.
When configurable I/O is used as safety I/O, strict safety guidelines must be followed. Before use, all safety devices and related equipment must be installed in accordance with professional safety instructions and undergo a comprehensive risk assessment.
| Input/output | Function definition |
|---|---|
| CI00~CI07 | Set the specific functions on the software interface |
| CI10~CI17 | |
| CO00~CO07 | |
| CO10~CO17 |
8.8 Controller General I/O
8.8.1 Function Definition
The CB-G40 series controller provides 16(+16) DI interfaces, 16(+16) DO interfaces, 2 analog voltage input interfaces and 2 analog voltage output interfaces.
The specific functions of the general I/O need to be configured in the teach pendant software. For detailed function description and configuration methods, please refer to the AuboStudio User Manual.
| Input/output | Function definition |
|---|---|
| DI00~DI07 | Set the specific functions on the software interface |
| DI10~DI17 | |
| DO00~DO07 | |
| DO10~DO17 | |
| CI00~CI07 | |
| CI10~CI17 | |
| CO00~CO07 | |
| CO10~CO17 | |
| AI0, AI1 | |
| AO0, AO1 |
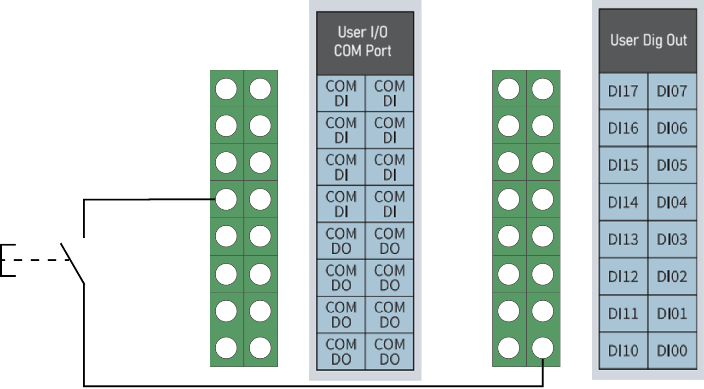
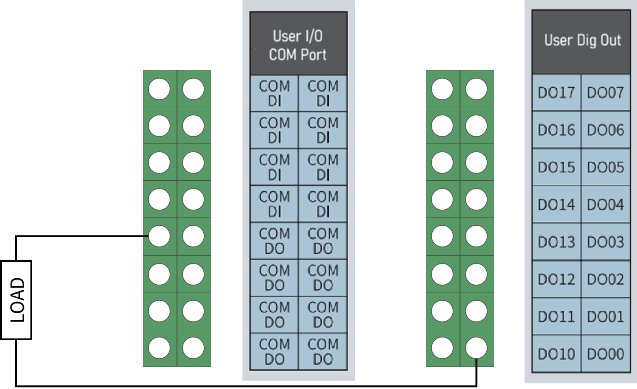
8.8.2 General Digital I/O Interface
CB-G40 series control box provides flexible I/O signal level control scheme.
| Input/Output | Parameter | Specification |
|---|---|---|
| DI | Input signal form | NPN/PNP |
| Input mode | Sink/Source | |
| Electrical specifications | 5mA/DC24V | |
| DO | Output signal form | NPN/PNP |
| Electrical specifications | 300mA/DC24V |
Example
- DI interface button switch
- DO interface load
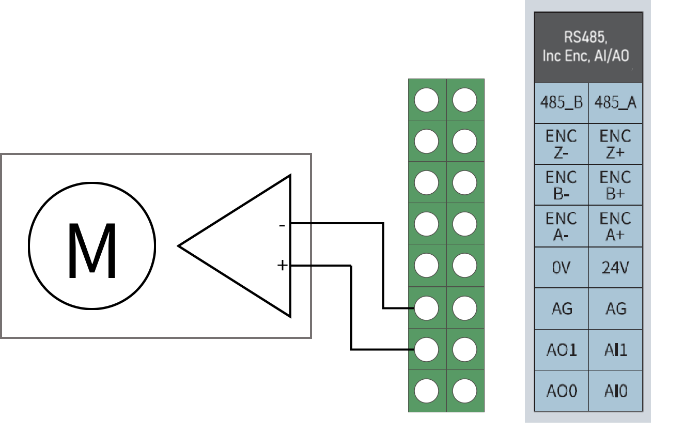
8.8.3 General Analog I/O Interface
The analog I/O interface is located in the leftmost row of terminal interfaces on the controller side panel. It has 2 analog voltage inputs and 2 analog voltage outputs, which are represented by AI and AO respectively, as shown in Figure 8-8.
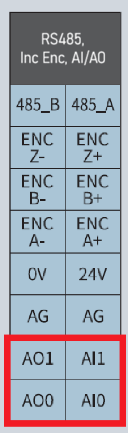
| Type | Voltage |
|---|---|
| Input | 0 ~ +10V |
| Output | 0 ~ +10V |
| Accuracy | ±1% |
| Parameter | Minimum | Maximum | Unit |
|---|---|---|---|
| Input voltage | 0 | +10 | V |
| Input resistance | 100K | Ω | |
| AI sampling resolution | 12 | BITS | |
| AI sampling accuracy | 10 | BITS | |
Example
- Wiring methods for analog voltage input
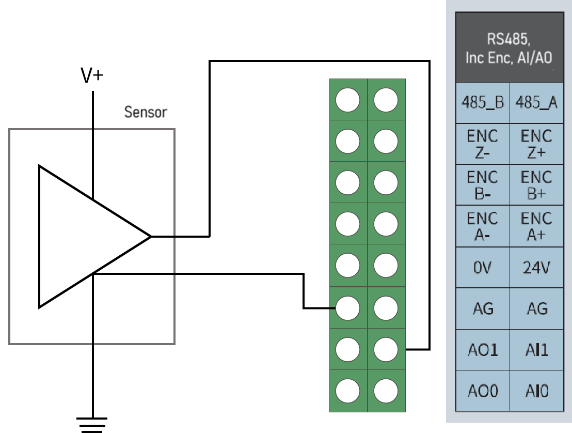
- Wiring method for analog voltage output
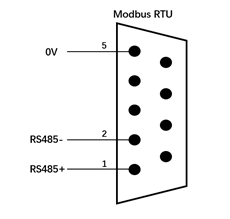
8.9 Terminal Block RS485 Interface
The RS485 interface in the terminal block is as shown in Figure 8-11 and can be used for Modbus RTU communication. 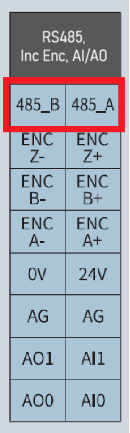
8.10 Incremental Encoder Interface
The incremental encoder interface is as shown in Figure 8-12, and some peripherals can be connected. 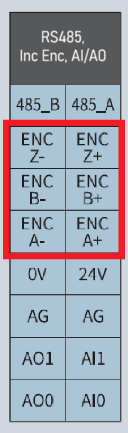
9 Usage of the Control Handheld
9.1 Introduction
The control handheld enables quick operations for the robot system. You may enable or disable the control handheld function via the AUBO STUDIO teach pendant software; this function is enabled by default upon factory delivery. Magnets are fitted on the rear side of the control handheld for magnetic mounting. Its structure is shown in Figure 9-1.

| No. | Name | Function |
|---|---|---|
| 1 | Emergency Stop Button | Press down to activate emergency stop for the robot. Rotate the button following the marked direction to restore normal status. |
| 2 | Power Indicator Light | Shows the power-on/power-off state of the controller: Steady off: Controller powered off Slow flash (1 Hz): Controller booting up Fast flash (4 Hz): Waiting for teach pendant startup Steady on: Teach pendant started, available for APP scan & connection; robot arm unpowered standby Breathing flash: Robot arm powered on standby Fast flash (4 Hz, lasts 3s): Searching for robot (teach pendant control mode) Slow flash (1 Hz): Shutting down |
| 3 | Key Indicator Light | Displays trigger status of buttons: 1. Flashes once each time a handheld button is tapped. 2. Steady on when long-pressed; turns off once released. |
| 4 | Power On/Off Button | 1. Power On: Press and hold for 2s then release. A "beep" tone sounds to start controller bootup. After approx. 20s, a second "beep" plays, the handheld power indicator flashes, and bootup completes. 2. Power Off: Press and hold for 2s then release. Power indicator goes out, and a double "beep-beep" tone confirms shutdown. 3. Forced Shutdown: Press and hold for 10s under any operating state for forced shutdown; power indicator turns off with double "beep-beep" confirmation tone. |
| 5, 9, 10 | Custom Buttons | Users may customize and configure the functions of these buttons in the AUBO STUDIO teach software. |
| 6 | 3-Position Enable Switch | This 3-position enable switch has three travel stages: 1. Released – OFF (initial state) 2. Half-pressed – ON 3. Fully pressed – OFF 4. Default Mode: It acts as a drag teach button by default. Drag teaching is available under the ON state; OFF state triggers safe stop (power remains on). 5. Manual Mode: Switchable to Manual Mode via the software interface. In Manual Mode, the robot arm supports normal manual control under the ON state; OFF state activates robot safe stop. |
| 7 | Robot Power On/Off Button | Controls power supply and enable status of the robot arm: 1. Robot Arm Power On: When the arm is powered off, short-press the button; the buzzer emits one "beep" and the arm starts powering up. After around 20 seconds, a second "beep" sounds, the power indicator changes from flashing to steady on, and power-up completes. 2. Robot Arm Enable (Brake Release Operation): When the arm is powered on but not enabled, short-press the button. The arm vibrates, and each of the six joints clicks sequentially to release the braking system; normal operation of the arm is available afterward. 3. Robot Arm Power Off: When the arm is powered and enabled, press and hold the button for 2 seconds then release. The arm deactivates and powers down; the power indicator switches from steady on to flashing, and a double "beep-beep" tone confirms power-off completion. |
| 8 | Program Start/Stop Button | This button controls the start, stop, pause and resume of robot arm programs. It enables quick operation without the teach pendant, meeting demands for on-site operation, unit deployment, maintenance and debugging. 1. Program Start: Press and hold the start/stop button on the control handheld for 2 seconds then release to start the program. A single "beep" from the buzzer indicates program execution. If no default program is set, the robot arm will not move and the buzzer gives no alert tone. 2. Program Pause/Resume: While the program is running, short-press the button to pause or resume the program; a single "beep" signals pause/resume status. 3. Program Termination: Press and hold for 2 seconds then release to fully stop the program (it cannot be resumed afterward and must be restarted manually). A double "beep-beep" tone confirms program abort. |
| 11 | Lock/Unlock | Handheld lock button: Enables locking and unlocking of the handheld to prevent accidental key presses during program operation. 1. Lock: When the handheld is unlocked, press and hold the button for 2 seconds then release. A single beep sounds, the lock indicator light stays steadily on, and all buttons except the emergency stop are disabled. 2. Unlock: When the handheld is locked, press and hold the button for 2 seconds then release. A double beep sounds, the lock indicator light turns off, and all handheld buttons return to normal operation. |
| 12 | Handheld Lock Indicator Light | Shows the lock status of the handheld: 1. Steady On: Handheld locked; operations of other buttons are invalid. 2. Steady Off: Handheld unlocked; all other buttons function normally. |
9.2 Other Instructions for the Handle
Combined indicator lamp: Emergency stop fault alert for the handheld
If the Power Indicator Light and Key Indicator Light flash rapidly simultaneously, it indicates an abnormal connection of the handheld emergency stop circuit. This light alarm has the highest priority; once triggered, it forcibly overrides the original status of all indicator lights, and this flashing state remains unchanged until the fault is cleared.
 Figure 9-2 Handheld Emergency Stop Fault Indicator Light
Figure 9-2 Handheld Emergency Stop Fault Indicator LightCustom Functions
Users may configure functions for custom buttons within the teach software. Available configurable functions are listed in the table below. Refer to the AUBO STUDIO Software Manual for detailed operation steps.
Table 9-2 Custom Button Function ListButton Function Definition Custom Button Return to Home Position, triggered by long press Drag Teach, triggered by long press Record Feature Point, triggered by short press Trajectory Playback, triggered by short press
9.3 G-STICK Handheld Kit
The G-series handheld is supplied with a tablet back clip kit as shown in the figure. This accessory enables assembly connection between the handheld and tablet to optimize operation experience.


10 Teach Pendant
10.1 Introduction
The CB-G series controller is equipped with ARCS, the latest independently developed robot operating system by AUBO, fully supporting both wired and wireless teaching modes. Users can operate the robot arm and controller via the dedicated AuboStudio software, create and run robot programs, and retrieve robot log information to meet the demands of various application scenarios. Refer to the AuboStudio User Manual for detailed operation instructions.
10.2 Wired Teach Pendant
The wired teach pendant connects directly to the controller via cables. Users can run AuboStudio software on this dedicated device for robot control and program development. There are two models of the G-Pendant teach pendant: AUBO-G-LV Teach Pendant and AUBO-G-HT Teach Pendant. The only difference between them lies in the placement position of the emergency stop button; all other functions are identical. This manual takes the AUBO-G-HT teach pendant as the demonstration example.

| No. | Name | Function |
|---|---|---|
| 1 | Emergency Stop Button | Press the button to trigger robot emergency stop. Rotate the button in the marked direction to restore normal status. |
| 2 | Power On/Off Button | Power On / Power Off: Press and hold for 2 seconds then release to complete power-on or power-off. Forced Shutdown: Press and hold for 10 seconds under any state to force power off. |
| 3 | Power Status Indicator Light | Steady off (unpowered); slow flash at 1 Hz (booting); fast flash at 4 Hz (waiting for teach pendant); steady on (system ready). |
| 4 | Key Indicator Light | Steady off when no button pressed; steady on when any button is pressed. |
| 5 | Robot Power Enable Button | Controls power supply and enable status of the robot arm: 1. Robot arm power up: Short press and release to power on the robot. 2. Robot arm enable (brake release): When powered on but not enabled, short press to release the robot brakes. 3. Robot arm power down: Press and hold for 2 seconds then release to disable and power down the robot. |
| 6 | Program Start/Stop Button | Press and hold for 2 seconds in standby to start the program; press and hold for 2 seconds during running to terminate the program. Short press during operation to pause; short press while paused to resume. |
| 7, 8, 9 | Custom Function Buttons | Users may customize and configure button functions within the AUBO STUDIO teach software. |
| 10 | Lock/Unlock Button | Locks and unlocks the teach pendant to prevent accidental key presses during program execution. Lock: Press and hold for 2 seconds, a single beep sounds, the lock indicator stays steady on, and all buttons except emergency stop are disabled. Unlock: Press and hold for 2 seconds, a double beep sounds, the lock indicator turns off, and the teach pendant unlocks. |
| Rear Side | 3-Position Enable Switch | This 3-stage enable button has three travel positions: 1. Released: OFF (initial state) 2. Half-pressed: ON 3. Fully pressed: OFF Default Mode: It functions as a drag teach button by default. Drag teaching is enabled under the ON state; the OFF state triggers safe stop (power supply remains connected). Manual Mode: Switch to Manual Mode via the software interface. In Manual Mode, the robot arm supports normal manual operation when ON; the OFF state activates robot safe stop. |
Custom Function Buttons
Users can configure the functions of custom buttons in the teach software. The configurable functions are listed in the table below. Refer to the AUBO STUDIO Software Manual for detailed operation procedures.
Table 10-2 Custom Button Function ListButton Function Definition Custom Button Return to Home Position, triggered by long press Drag Teach, triggered by long press Record Feature Point, triggered by short press Trajectory Playback, triggered by short press
10.3 Wireless Teaching
If the CB-G series controller is equipped with built-in Wi-Fi, users can install the Android client of AuboStudio on a tablet, then connect to and control the robot via Wi-Fi.
11 Appendix A Glossary
Technical Specifications
| Controller Model | CB-G40 | |
| Controller Dimensions (LWH) | 504mm x 270.2mm x 370.5mm | |
| Controller Weight | 17.5kg | |
| IP Rating | IP 20 | |
| Power Supply | 100~240VAC, 50–60Hz (Wide Voltage Range) | |
| I/O Ports | Digital Input | 16 (General) 16 (Configurable) / 8 (Safety) |
| Digital Output | 16 (General) 16 (Configurable) / 8 (Safety) | |
| RS485 | 2 | |
| I/O Power Supply | DC 24V 3A max | |
| Operating Temperature | 0-50℃ | |
| Transport & Storage Temperature | -40℃~60℃ | |
| Humidity | 95% Relative Humidity (Non-condensing) | |
| Cooling Method | Air Cooling | |
| Cable Length | AC Power Cable | 5m |
| Robot Arm Cable | 5m | |
| Teach Pendant Cable | 4m | |