AUBO-S Series Robot Arm User Manual
1 About this manual
Version information
v1.0.1
The User Manual will be subject to regular check and revision, and updated content will appear in new versions. The content or information in this manual is subject to change without prior notice.
AUBO (Beijing) Intelligent Technology Co., Ltd. is not responsible for any errors or omissions that may appear in this manual, or for any accidental or indirect damages resulting from the use of this manual and the products described herein.
Please read this manual before installing and using the product.
Please keep this manual properly for reading and reference at any time.
All figures in this manual are for illustrative purposes only. The actual product received shall prevail.
This manual is the exclusive property of AUBO (Beijing) Intelligent Technology Co., Ltd. It may not be photocopied, reproduced in whole or in part, or converted into any other form without the written permission of AUBO (Beijing) Intelligent Technology Co., Ltd.
Copyright © 2015-2026 AUBO All rights reserved.
This user manual is for AUBO-S series robot arm, and applies to the following products: AUBO-S2 and AUBO-S5.
How to use this manual
This manual applies to scenarios such as installation, commissioning, maintenance, repair, and disassembly of AUBO-S series robot arms.
Target audience
This Manual is intended for the following professionals:
Installation personnel;
Maintenance personnel;
Repair personnel.
Operation prerequisites
The reader of this manual shall have the following basic knowledge and qualifications:
AUBO training experience;
the knowledge required for mechanical and electronic installation, repair, and maintenance of robots;
basic safety operation awareness.
Related documents
User Manual of AUBO-CB-S Series Controller
AuboStudio User Manual
More information
For more information, please visit the website: www.aubo-robotics.cn
2 Revision History
| Version No./Time | Description |
|---|---|
| v1.0.0*/20260428 | Trial version v1.0.0* released. |
| v1.0.1*/20260615 | Robotic Arm Parameter Update. |
3 Safety
3.1 Safety warning signs
The safety-related content in this manual is illustrated using the following warning signs. The descriptions of the warning signs in the manual indicate important information that must be followed.
| Warning Sign | Description |
|---|---|
 | A potentially hazardous situation which, if not avoided, could result in death or serious injury. |
 | A potentially hazardous situation which, if not avoided, could result in personal injury or serious equipment damage. |
 | A potentially hazardous situation which, if not avoided, could result in personal injury or equipment damage. Matters marked with this symbol may, depending on the specific circumstances, sometimes have the potential for serious consequences. |
 | A situation which, if not avoided, could result in personal injury or equipment damage. Matters marked with this symbol may, depending on the specific circumstances, sometimes have the potential for serious consequences. |
3.2 Safety precautions
3.2.1 Usage notes
When starting the equipment for the first time, you are required to read and follow the basic safety instructions in this manual. Other detailed safety instructions will be found in later sections of the manual. However, due to the possibility of various situations in actual operation, this manual may not cover all operations that are prohibited or not allowed.
| Sign | Description |
|---|---|
| 1. Please be sure to install the robot and all electrical equipment in accordance with the requirements and specifications in this user manual. 2. Initial tests and inspections on the robot and its protective system are required before the first use and commissioning. 3. Before starting the robot and system for the first time, be sure to check whether the robot and system are complete, safe to operate, and free of any damage. During this inspection, it is necessary to observe compliance with national or regional production safety regulations, and all safety features must be tested. 4. The user must check and ensure that all safety parameters and user programs are correct, and that all safety features are functioning properly. Personnel qualified to operate the robot are required to check each safety feature. The robot can only be started after it has passed comprehensive and careful safety tests and reached the required safety level. 5. The robot must be installed and commissioned by qualified professionals in accordance with installation standards. 6. When the robot installation and construction are complete, a comprehensive risk assessment must be conducted again and documented. 7. Safety parameters must be set and changed by authorized personnel, and passwords or isolation measures must be used to prevent unauthorized personnel from changing or setting them. After the safety factor is modified, the relevant safety features need to be analyzed. 8. In case of an accident or abnormal operation, the emergency stop switch can be pressed to stop the robot's movement. 9. The joint modules of the AUBO-S series robot arm are equipped with brakes to maintain the robot's pose during a power outage. Do not frequently turn the power supply on and off. It is recommended that the interval between power cycles be greater than 10s. 10. The AUBO-S series robot arm has a collision detection function. When an external force on the powered-on robot exceeds the normal force range set by the user for safety, the robot will stop automatically to prevent robot damage or personal injury to the operator from collision. This feature is specially designed for the safety of human-robot collaboration in the AUBO-S series robot arm. However, it requires the robotic system to be within its normal operating range and to be used with AUBO series controllers. If the users develop their own controllers, the robot will not have the above functions. The user is solely responsible for any hazardous consequences arising therefrom. 11. The robot arm generates heat during operation. Do not operate or touch the robot while it is working or immediately after it has stopped. Turn off the power supply and wait for one hour for the robot to cool down. 12. Do not insert fingers into the heated areas of the controller. |
| 1. Ensure that the robot arm and tools are correctly and securely installed. 2. Ensure that the robot arm has enough space to move freely. 3. Do not use the robot if it is damaged. 4. Do not connect safety devices to general I/O interfaces; only use safety interfaces. 5. Ensure correct installation settings (e.g., installation angle of the robot arm, weight in TCP, TCP offset, safety configuration, etc). 6. Tools and obstacles must not have sharp corners or pinch points. Ensure that everyone's head and face are outside the robot's reachable range. 7. Pay attention to the robot's movement when using the teach pendant software. 8. Any impact will release a large amount of kinetic energy, which is much higher than that in high-speed and high-payload situations. 9. Connecting different machines may increase existing hazards or create new ones. Always perform a comprehensive risk assessment of the entire installation. When different safety and emergency stop performance levels are required, always select the highest level. Always read and understand the manuals for all equipment used in the installation. 10. Do not modify the robot. Modifications to the robot may create hazards that the integrator cannot foresee. Authorized robot reconfiguration must be performed in accordance with the latest version of all relevant service manuals. If the robot is changed or modified in any way, AUBO (Beijing) Intelligent Technology Co., Ltd. disclaims all liability. 11. Before transporting the robot, the user needs to check the insulation and protective measures. 12. When handling the robot, comply with the transportation requirements and handle it with care to avoid collisions. |
| 1. When the robot is connected to or working with machinery that could cause damage to the robot, it is strongly recommended to check all robot functions separately. 2. AUBO (Beijing) Intelligent Technology Co., Ltd. is not liable for any damage to the robot or personal injury caused by improper operation on the robot. 3. Do not expose the robot to permanent magnetic fields. Strong magnetic fields can damage the robot. |
3.2.2 Personnel safety
During operation of the robotic system, the safety of the operators must be ensured first. The following are general precautions. Please take appropriate measures to ensure the safety of the operators.
| Sign | Description |
|---|---|
| 1. All personnel who use the robotic system shall be trained through the training courses organized by AUBO (Beijing) Intelligent Technology Co., Ltd. Users must ensure that they have a full understanding of safe and standard operating procedures and are qualified to operate the robot. For training details, please contact our company at support@aubo-robotics.cn. 2. All personnel using the robotic system shall not wear loose clothing or jewelry. Please ensure long hair is tied back when operating the robot. 3. While the equipment is running, even if the robot appears to have stopped, it may be in a state of imminent motion, waiting for a start signal. Even in this state, the robot shall be considered active. 4. In emergency and abnormal situations, such as when a person is trapped or surrounded by a robot, force the joints to move by pushing or pulling the robot arm firmly. Manually moving the robot arm without power is limited to emergency situations and may damage the joints of the robot arm. |
3.3 Responsibilities and specifications
The AUBO-S series robot arm can be combined with other equipment to form a complete machine, but it is not complete by itself. Therefore, the information in this manual does not cover how to comprehensively design, install, and operate a complete robot, nor does it exhaust all possibilities that could affect the safety of the peripheral equipment of this complete system. The safety of a complete robot installation depends on how the robot is integrated. The integrator must conduct a risk assessment for the design and installation of the complete system in accordance with the laws, regulations, safety specifications, and standards of their country. The risk assessment is one of the most important tasks that the integrator must complete. The integrator can refer to the following standards to perform the risk assessment process.
ISO 12100:2010 Safety of Machinery - General Principles for Design - Risk Assessment and Risk Reduction;
ISO 10218-2:2025 Robots and Robotic Devices - Safety Requirements for Industrial Robots - Part 2: Robot Systems and Integration;
RIA TR R15.306-2014 Technical Report for Industrial Robots and Robot Systems - Safety Requirements - Task-based Risk Assessment Methodology;
ANSI B11.0-2010 Safety of Machinery; general Requirements and Risk Assessment.
The responsibilities to be fulfilled by an integrator include but are not limited to:
comprehensive risk assessment of complete robot system;
confirmation of the correctness of the system's design and installation;
provision of training to users and staff;
development of the operation specification of the complete system with specific operation process defined;
development of appropriate safety measures;
adoption of appropriate methods to eliminate hazards or minimize any hazards to an acceptable level at the time of final installation;
communication of residual risks to end users;
marking of the integrator's logo and contact information on the robot;
archiving of relevant technical documents.
For applicable standards and laws, please visit: www.aubo-robotics.cn.
All safety information contained in this manual shall not be considered a guarantee by AUBO (Beijing) Intelligent Technology Co., Ltd. Personal injury or equipment damage caused by the operator may still occur even if all safety instructions are followed.
AUBO (Beijing) Intelligent Technology Co., Ltd. is committed to continuously improving the reliability and performance of its products and therefore reserves the right to upgrade its products without prior notice. AUBO (Beijing) Intelligent Technology Co., Ltd. strives to ensure the accuracy and reliability of the content in this manual, but is not responsible for any errors or omissions.
3.4 Hazard identification
The risk assessment should consider all potential contact between the operator and the robot during normal use, as well as foreseeable misuse. The operator's neck, face, and head shall not be exposed to avoid contact. Using the robot without peripheral safety guards requires a prior risk assessment to determine if the associated hazards pose an unacceptable risk, for example:
Potential hazards from using sharp end effectors or tool connectors;
Potential hazards from handling toxic or other harmful substances;
The risk of the operator's fingers being pinched by the robot base or joints;
The hazard of being struck by the robot;
The hazard of the robot or the tool connected to the end not being securely fastened;
The hazard of impact between the robot payload and a solid surface.
The integrator must measure such hazards and their associated risk levels through a risk assessment, and must identify and implement corresponding measures to reduce the risks to an acceptable level. Please note that other significant hazards may exist for specific robot equipment.
By combining the inherent safety design measures applied to AUBO robots with the safety specifications or risk assessments implemented by the integrator and end-user, the risks associated with the collaborative operation of the AUBO-S series robot arms are reduced to a reasonably practicable minimum. This document serves to communicate any residual risks present before the robot's installation to the integrator and end-user. If the integrator's risk assessment determines that there are hazards in their specific application that may pose an unacceptable risk to the user, the integrator must take appropriate risk reduction measures to eliminate or minimize these hazards until the risk is reduced to an acceptable level. It is unsafe to use the robot before appropriate risk reduction measures, if required, have been taken.
If the robot is installed for non-collaborative use (e.g., when using hazardous tools), the risk assessment may conclude that the integrator needs to connect additional safety devices (e.g., a safety start device) during its programming to ensure the safety of personnel and equipment.
3.5 Emergency handling
3.5.1 Emergency stop device
Pressing the emergency stop button will halt all movements of the robot. The emergency stop should not be used as a risk reduction measure, but it can serve as a secondary protective means. If multiple emergency stop buttons need to be connected, this must be included in the risk assessment of the robot application.
All emergency stop buttons are designed with a lock mechanism, which must be disengaged to end the emergency stop state.
The robot arm itself is not equipped with an emergency stop button, but such buttons are available on the controller, wired teach pendant, control handle, and other devices. Please refer to the user manual of corresponding controller or accessories for details.
| Sign | Description |
|---|---|
| 1. If a tool or device connected to the end of the robot poses a potential threat, it must be integrated into the system's emergency stop circuit. Failure to comply with this warning may result in death, serious personal injury, or significant property damage. 2. Recovering from an emergency stop state is a simple but very important step, which can only be performed after ensuring that all hazards in the robotic system have been completely eliminated. |
3.5.2 Forced emergency movement of joints
The robot joints can be forced to move by the following methods:
Forced drag teaching: Push or pull the robot arm firmly to force the joints to move.
| Sign | Description |
|---|---|
| Forcibly moving the robot arm manually is limited to emergency situations and may damage the joints of the robot arm. |
3.5.3 Over-force safety protection of robot arm
The robot arm is equipped with an over-force safety protection feature. When the robot arm is powered on and stationary, if an operator or other object accidentally collides with the robot arm and the collision force exceeds the safety threshold, the robot arm will move passively in the direction of the collision force. This feature can reduce injuries to operators and damage to other objects and the robot arm in the event of a collision.
| Sign | Description |
|---|---|
| This feature can reduce collision damage. A risk assessment is required when this feature is used for other purposes. |
3.5.4 Collision protection
The robot arm is equipped with a collision protection feature. During operation, if an operator or another object accidentally collides with the robot arm and the collision force exceeds the safety threshold, the robot arm will enter a Category 2 stop state and simultaneously switch to drag teaching mode. At this point, the robot arm can be dragged to a relatively safe position, after which the operator can use the teach pendant to resume operation. This feature can reduce injuries to operator and damage to other objects and the robot arm in the event of a collision, while also saving time on restarting the program, improving work efficiency. The safety threshold for collision force can be changed by setting the collision level.
4 Description of Robot Arm
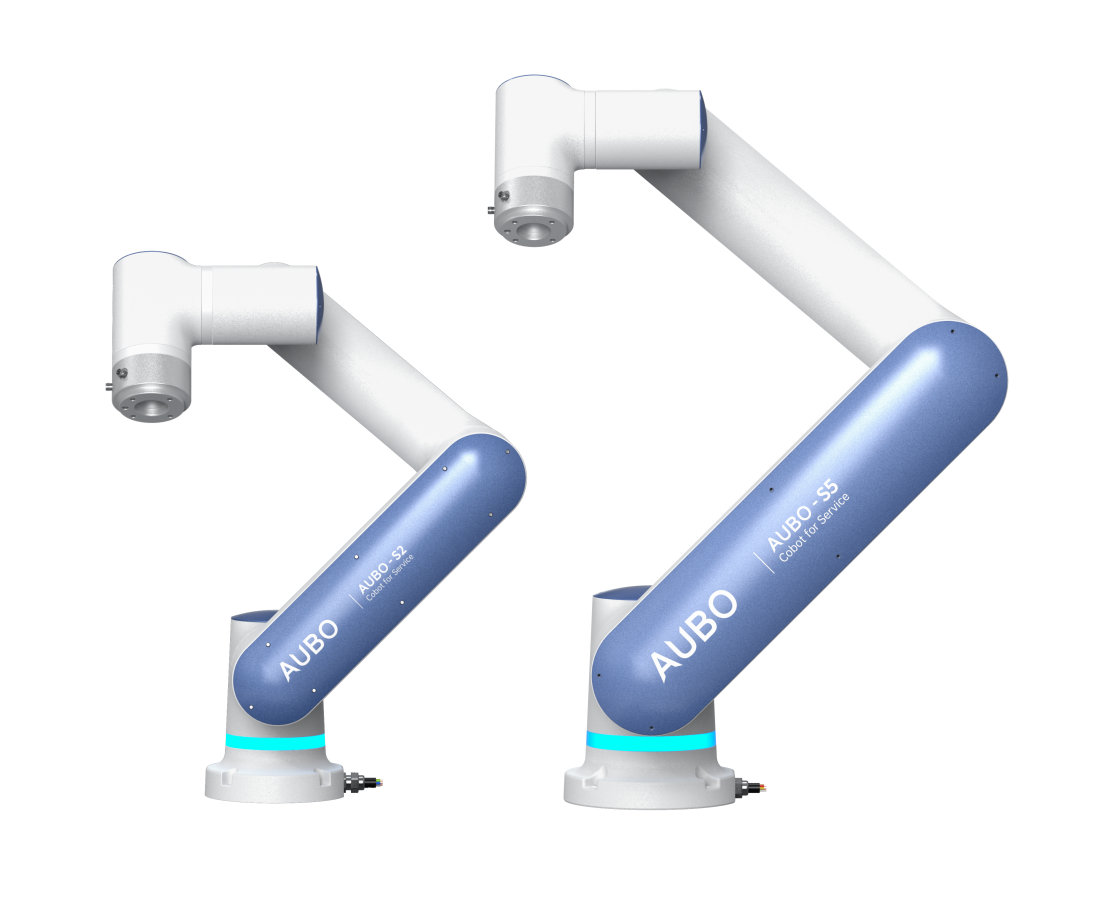
4.1 Introduction to S series robot arm
The AUBO-S series robot arm is a lightweight collaborative robot developed by AUBO (Beijing) Intelligent Technology Co., Ltd. for commercial and service applications. It features a deeply lightweight and compact design, with two load specifications of 2 kg and 5 kg available. It is also equipped with abundant expansion interfaces, and supports multiple simple interaction methods, and ARCS wireless teaching to meet diverse commercial service application needs.
| Sign | Description |
|---|---|
| The AUBO-S series robot arm is only compatible with the AUBO-CB-S controller. |
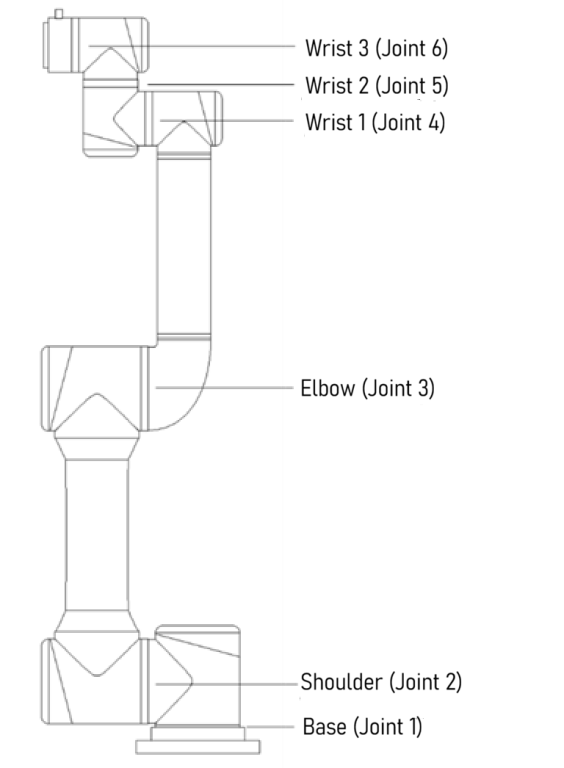
The AUBO-S series robot arm mimics the human arm and has six rotating joints, each representing one degree of freedom. As shown in Figure 4-2, the robot arm joints include the pedestal (Joint 1), shoulder (Joint 2), elbow (Joint 3), wrist 1 (Joint 4), wrist 2 (Joint 5), and wrist 3 (Joint 6). The pedestal is used to connect the robot arm body to the base, and the tool end is used to connect the robot arm to the tool. The shoulder and elbow, as well as the elbow and wrist, are connected by arm tubes. Through the teach pendant software interface or drag teaching, users can control each joint to rotate, allowing the robot's end tool to move to different poses.
4.2 Technical specifications
4.2.1 AUBO-S2
| Robot arm type | AUBO-S2 |
|---|---|
| Degrees of freedom | 6 rotary joints |
| Body weight (including robot arm cables) | 13.5kg |
| Payload | 2kg |
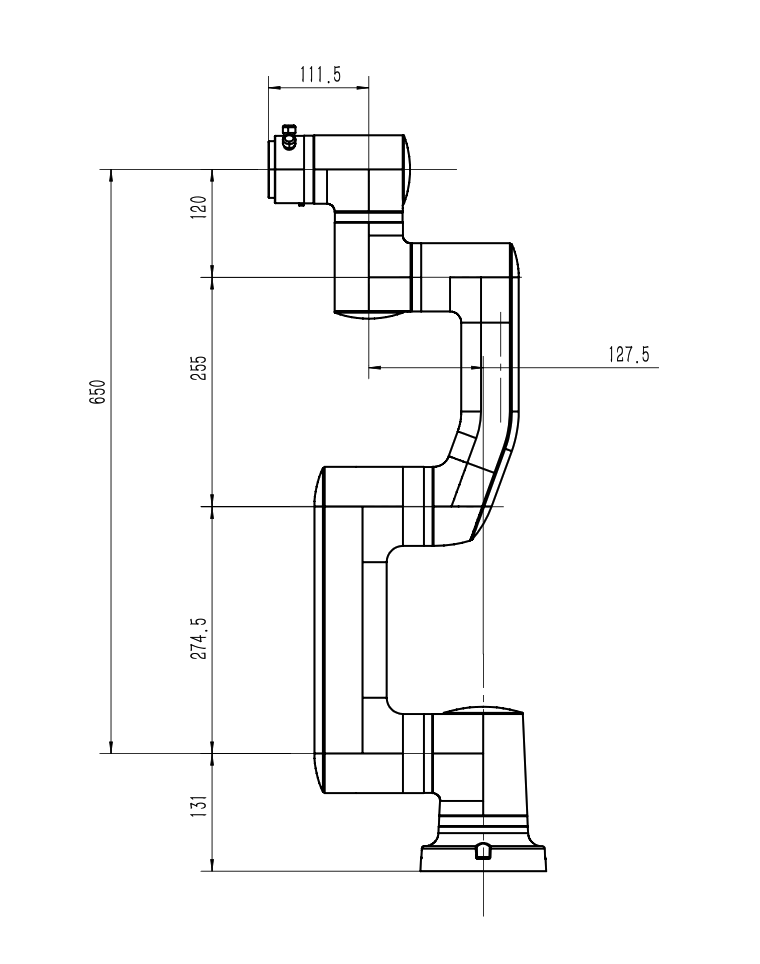
| Maximum working radius | 650mm |
| Joint range | joint1/joint2/joint4/joint5/joint6: -360° ~ +360° joint3: -156° ~ +156° |
| Maximum joint speed | joint1/joint2/joint3: 180°/s joint4/joint5/joint6: 230°/s |
| Tool speed | ≤ 2.0m/s |
| Repositioning accuracy | ± 0.05mm |
| Operating ambient temperature range | 0 ~ 50°C |
| Operating ambient humidity | 90% RH (non-condensing) |
| IP rating | IP54 |
| Average power | Approx. 150W when running typical programs |
| Peak power | 500W |
| Mounting surface diameter | ⌀140mm |
4.2.2 AUBO-S5
| Robot arm type | AUBO-S5 |
|---|---|
| Degrees of freedom | 6 rotary joints |
| Weight (including robot arm cables) | 20.33kg |
| Payload | 5kg |
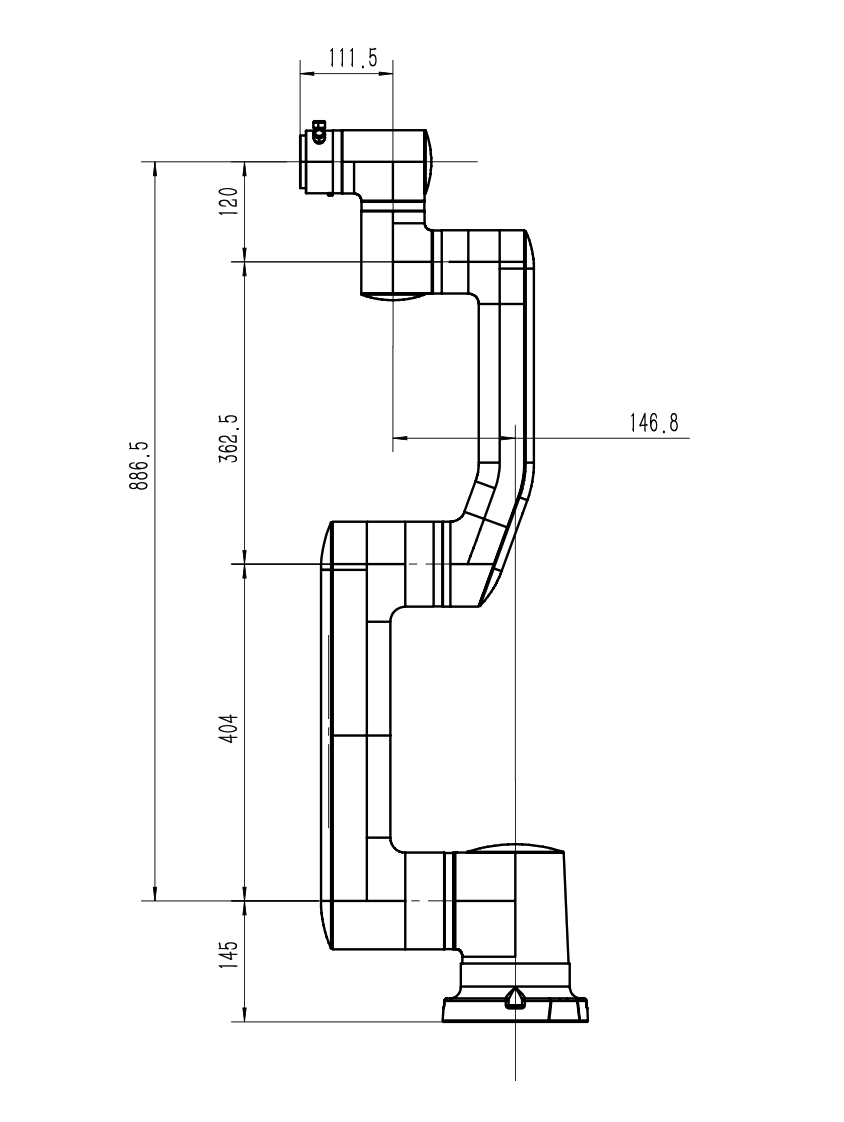
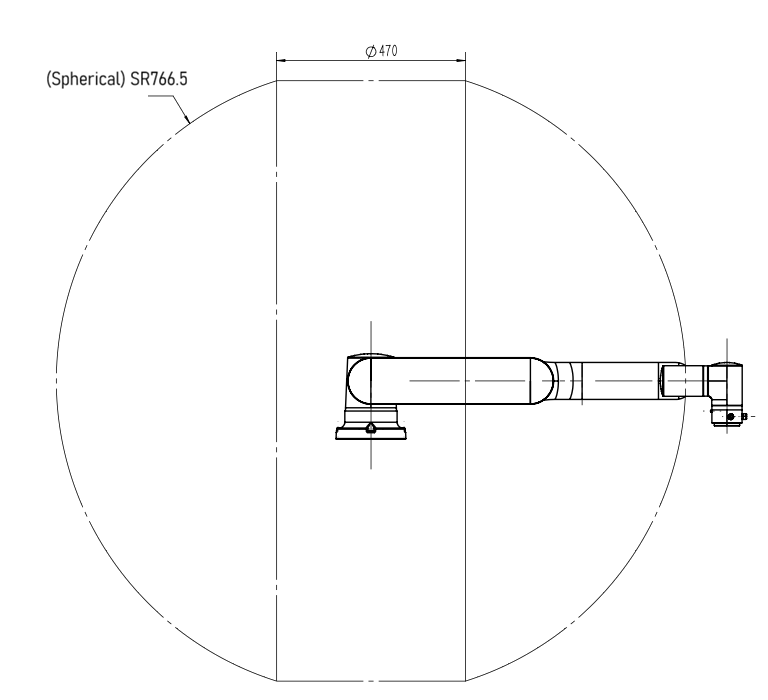
| Maximum working radius | 886.5mm |
| Joint range | joint1/joint2/joint4/joint5/joint6: -360° ~ +360° joint3: -160° ~ +160° |
| Maximum joint speed | joint1/joint2/joint3: 180°/s joint4/joint5/joint6: 230°/s |
| Tool speed | ≤ 2.7m/s |
| Repositioning accuracy | ± 0.05mm |
| Operating ambient temperature range | 0 ~ 50°C |
| Operating ambient humidity | 90% RH (non-condensing) |
| IP rating | IP54 |
| Average power | Approx. 200W when running typical programs |
| Peak power | 600W |
| Mounting surface diameter | ⌀174mm |
4.3 Performance parameters
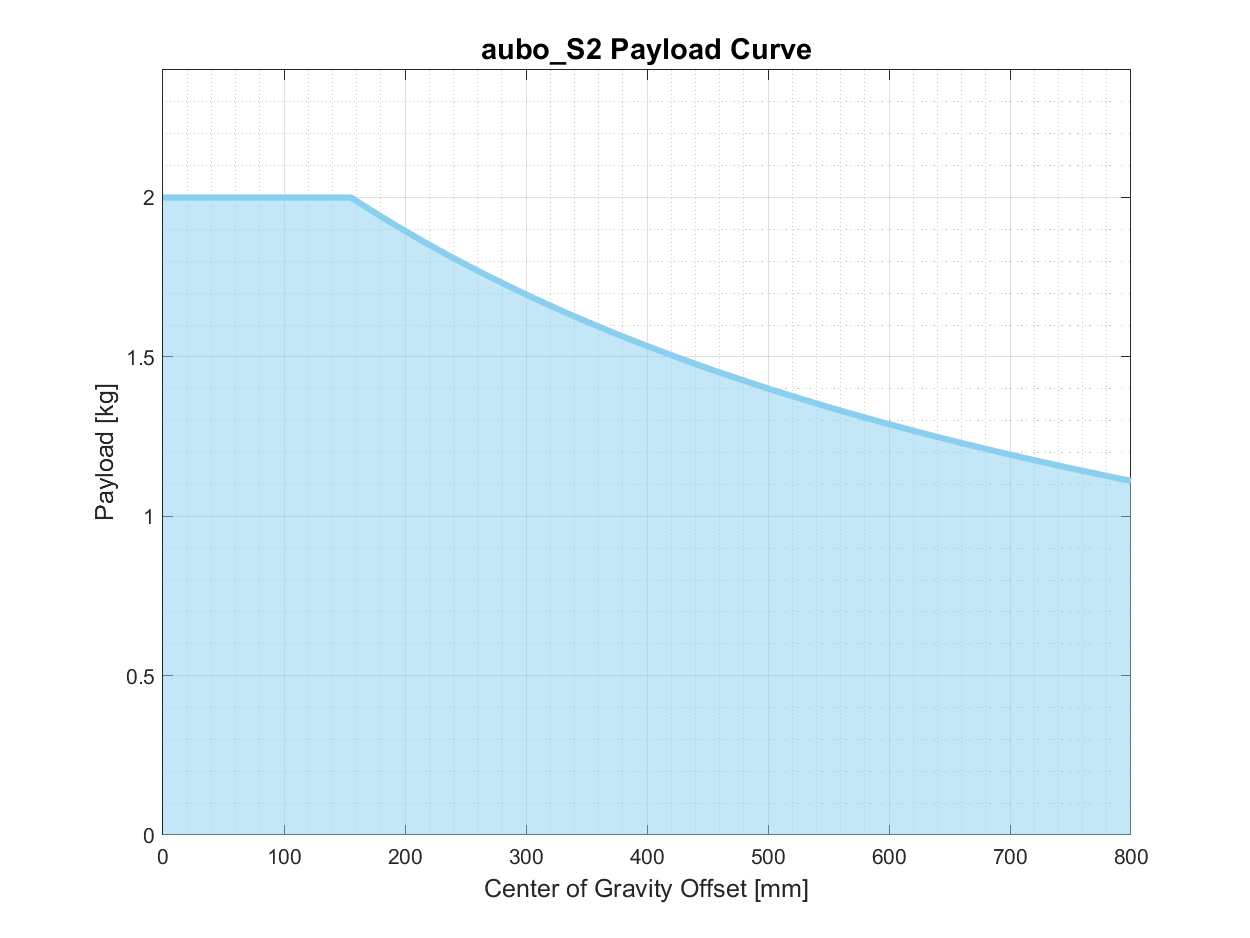
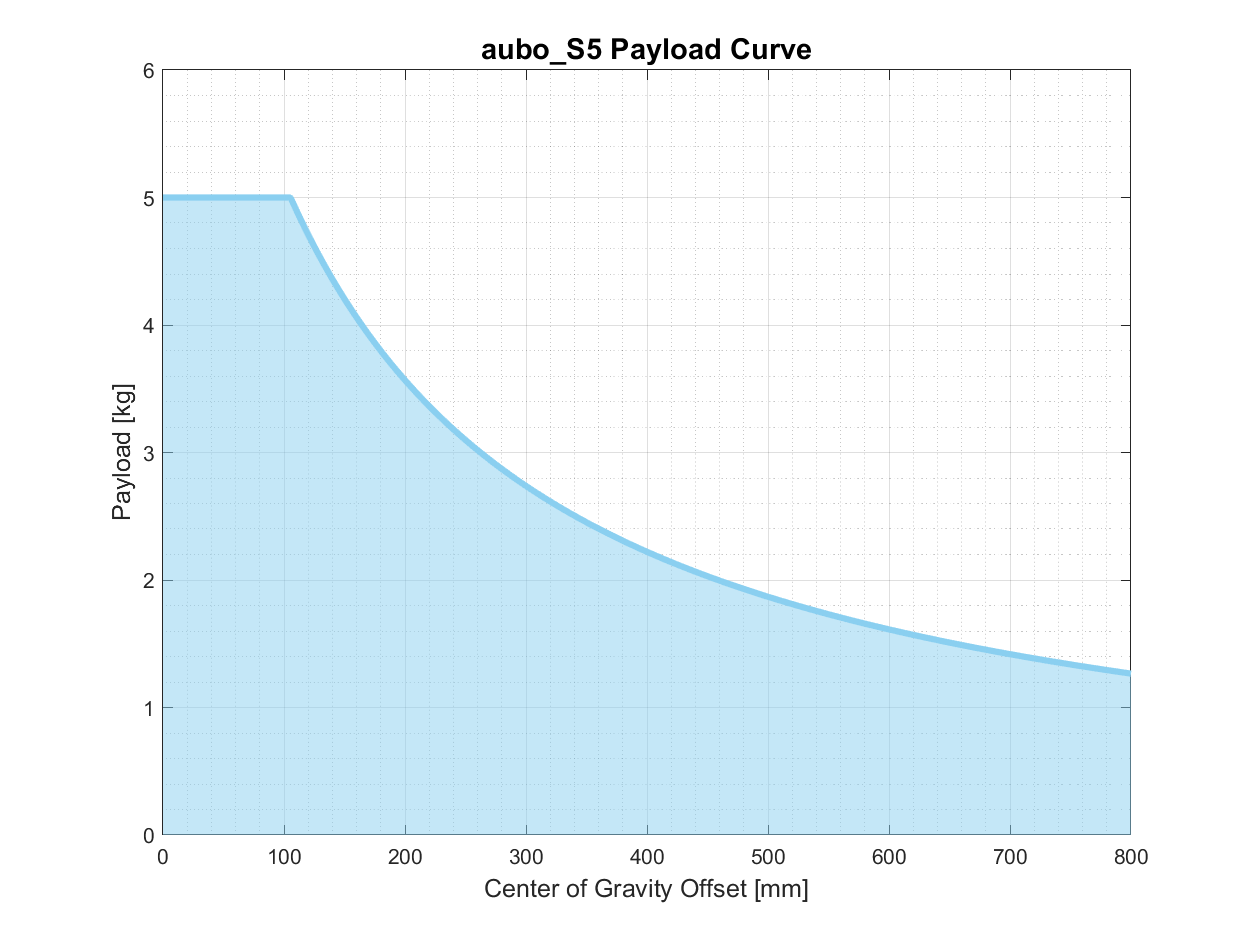
4.3.1 Load offset
The following is the load offset curve of the robot arm's wrist, in which the vertical axis represents the payload, and the horizontal axis represents the distance from the center of the tool end flange to the center of the tool.
| Sign | Description |
|---|---|
| 1. The load conditions should be within the range shown in the chart. 2. The load shown in the chart is the maximum load capacity of this robot arm. Under no circumstances should the maximum load shown in the chart be exceeded. 3. Otherwise, the internal components of the robot arm may be damaged. |
4.4 Robot arm workspace
4.4.1 Mechanical dimensions
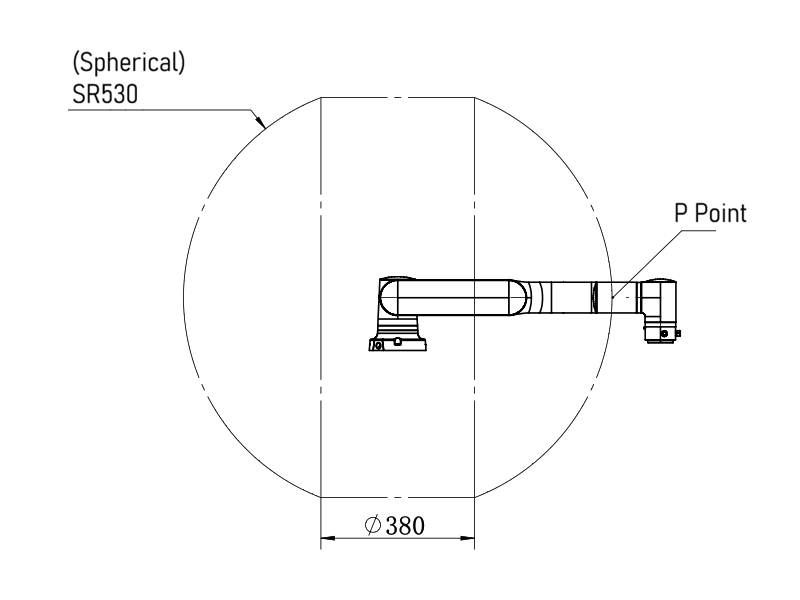
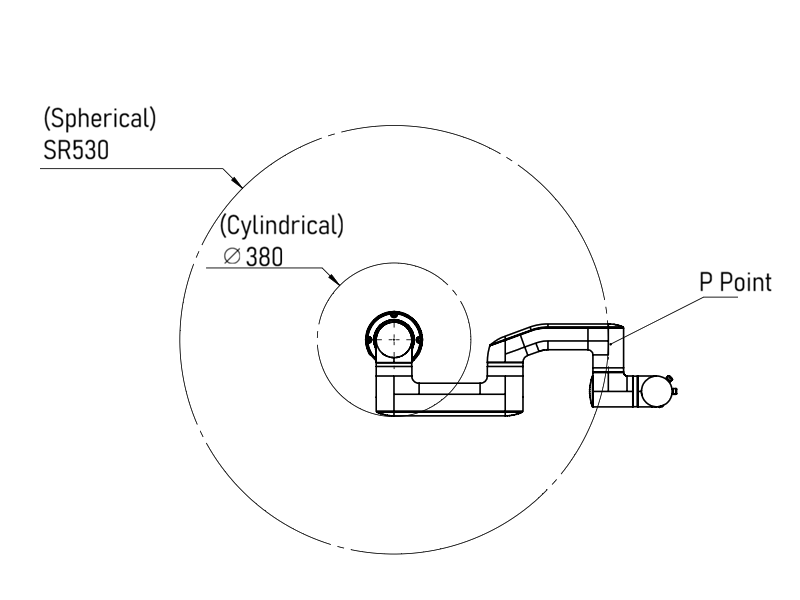
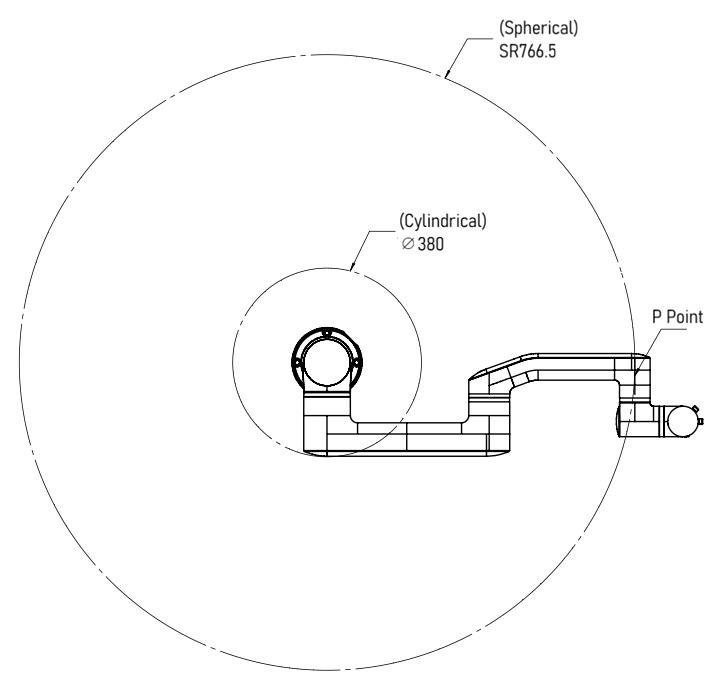
4.4.2 P point movement range of robot arm body
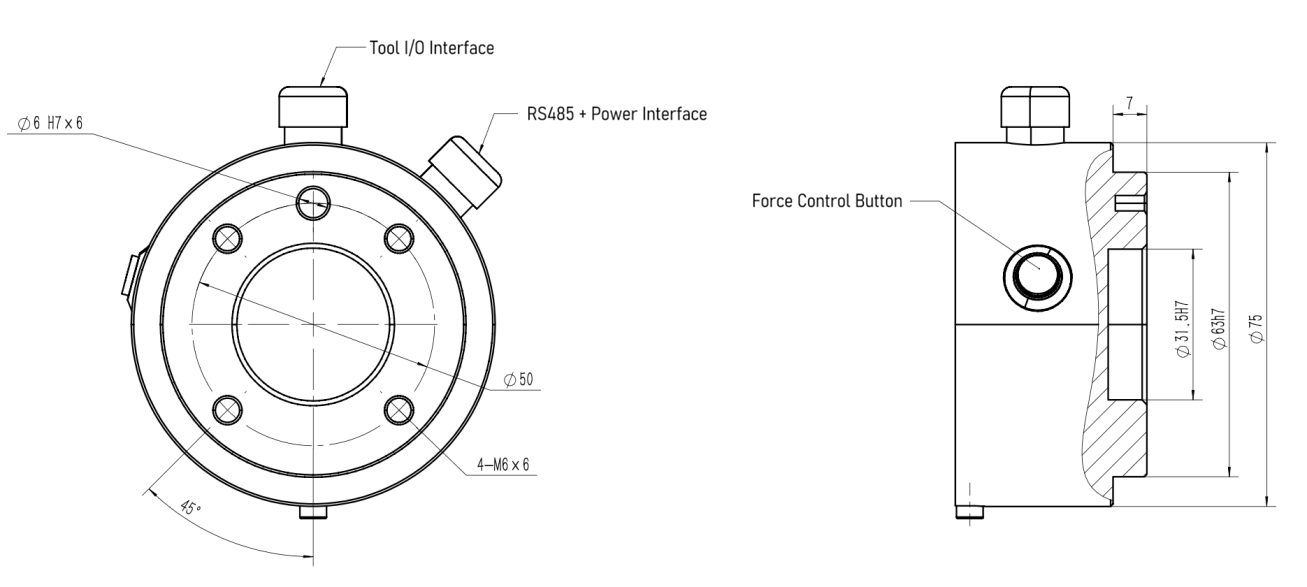
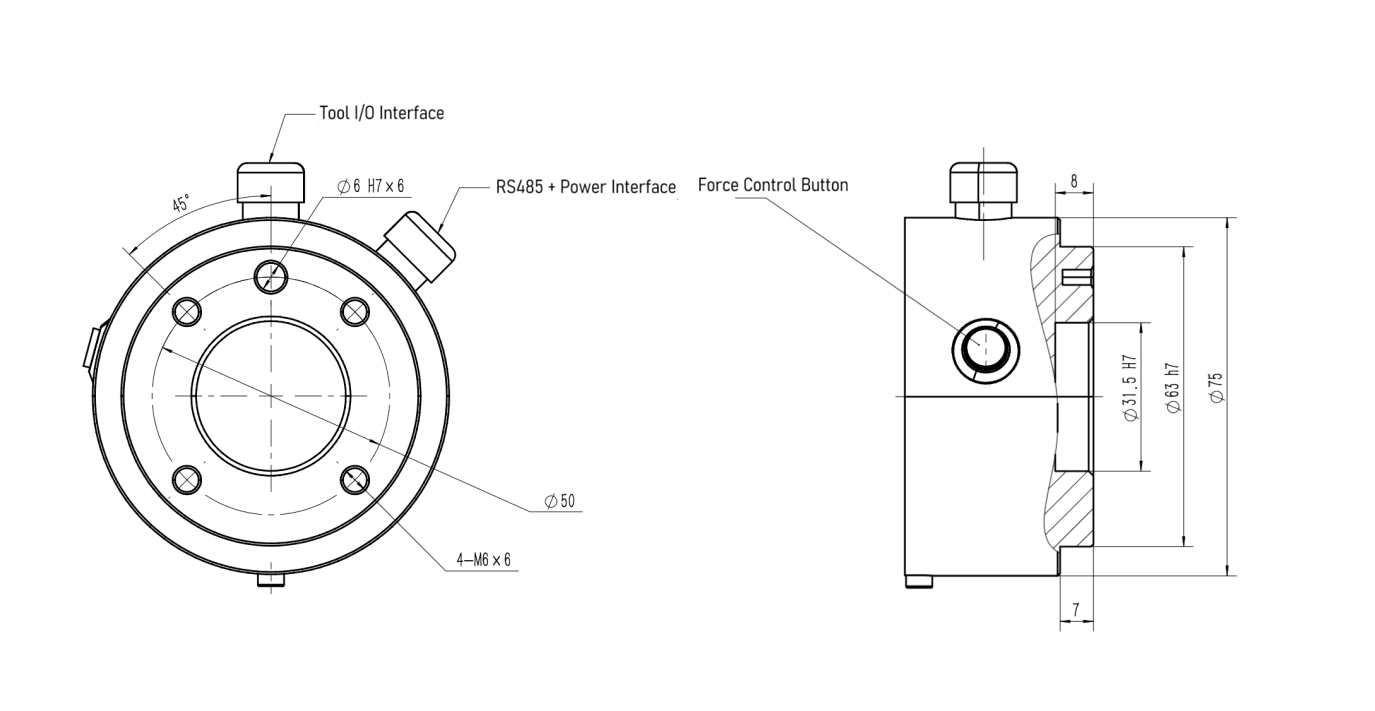
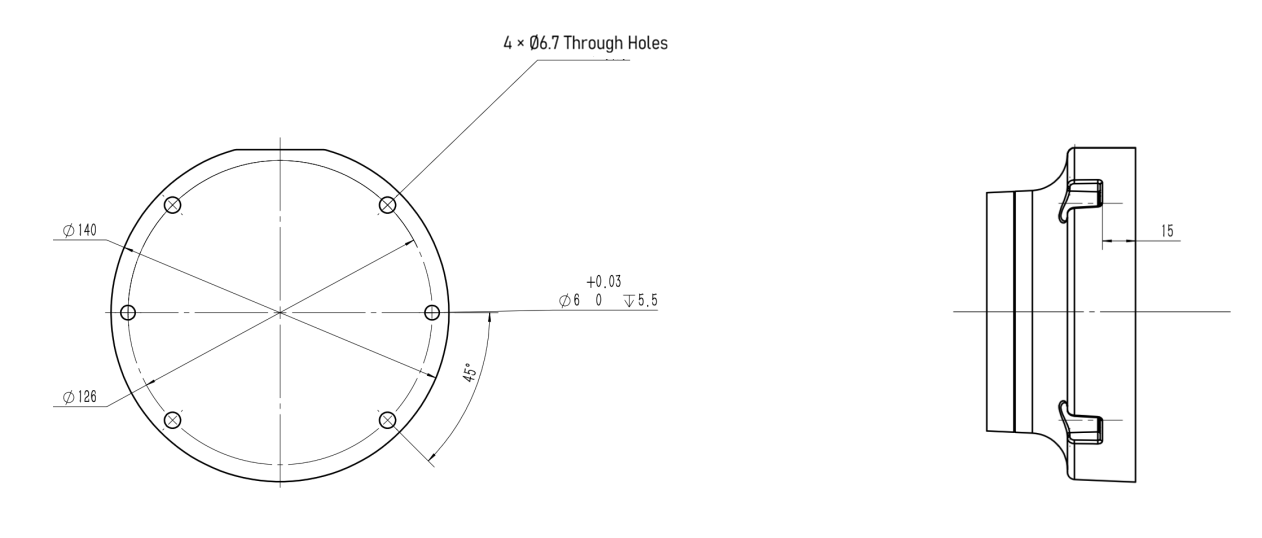
4.4.3 Mechanical dimensions of end flange
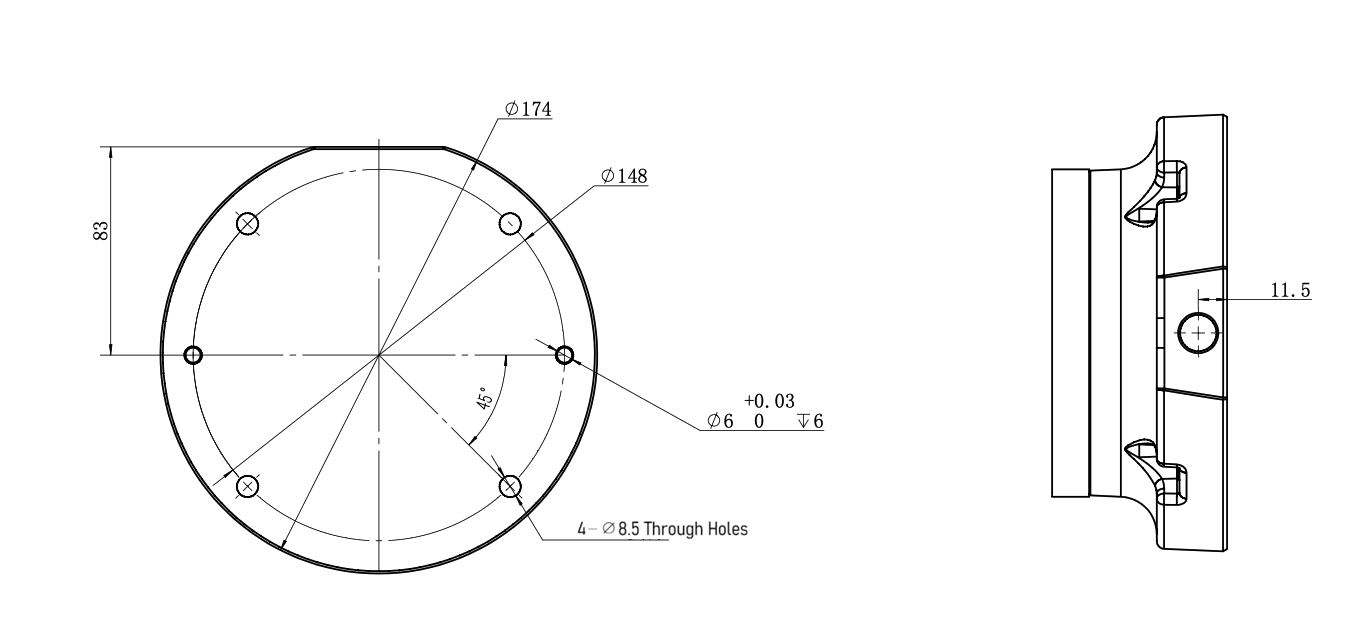
4.4.4 Top view of pedestal
5 Installation and Commissioning
5.1 Brief installation steps
Brief installation steps for AUBO-S series robots:
Determine the robot arm workspace
Install the robot arm body on the base
Install the end tool
5.2 Important safety instructions
| Sign | Description |
|---|---|
| Installation environmental conditions: 1. No corrosive gases or liquids 2. No oil mist 3. No smoke 4. No dust or metal powder 5. No mechanical impact or vibration 6. No electromagnetic noise 7. No radioactive materials 8. Low humidity 9. No flammables 10. Ambient temperature: 0℃~ 50℃ 11. No direct sunlight exposure (avoiding outdoor use) Floor load capacity: The robot shall be installed on a solid surface that can withstand at least ten times the full torque of the base joint and at least five times the weight of the robot arm. Moreover, the surface must be free of vibration. Instructions for installing additional devices: If additional components, such as cables, that are not part of the scope of supply from AUBO (Beijing) Intelligent Technology Co., Ltd. are integrated into the robot, the user is responsible for ensuring that these components have no adverse effects and do not compromise the safety features. |
| 1. A safety assessment must be carried out after each installation of the robot, and safety instructions in Chapter 3 (Safety) must be strictly followed. 2. The controller should be placed horizontally on the floor. A clearance of 50 mm shall be reserved on each side of the controller to ensure smooth airflow. 3. The teach pendant can be hung on the controller. Ensure that cables will not be stepped on. |
| 1. A damp controller can cause injury or death. 2. Pay close attention to environments with conductive dust. |
5.3 Installation of robot
5.3.1 Base (optional)
The AUBO robot base is an optional component for supporting and securing the robot arm. Figure 5-1 shows a schematic of the base style; the final appearance depends on the configuration of the actual equipment. The base is equipped with four anchor bolts and four casters for easy securing and moving. When securing the robot arm, rotate the upper part of the anchor bolts to lower them; when moving the robot arm, rotate the nut at the lower part of the anchor bolts with a wrench to raise the anchor bolts and disengage the casters from the floor.
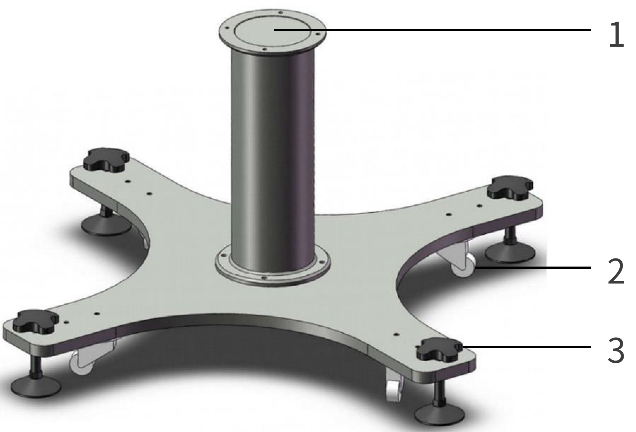
1 - Contact surface between base and robot arm; 2 - Caster; 3 - Anchor bolt
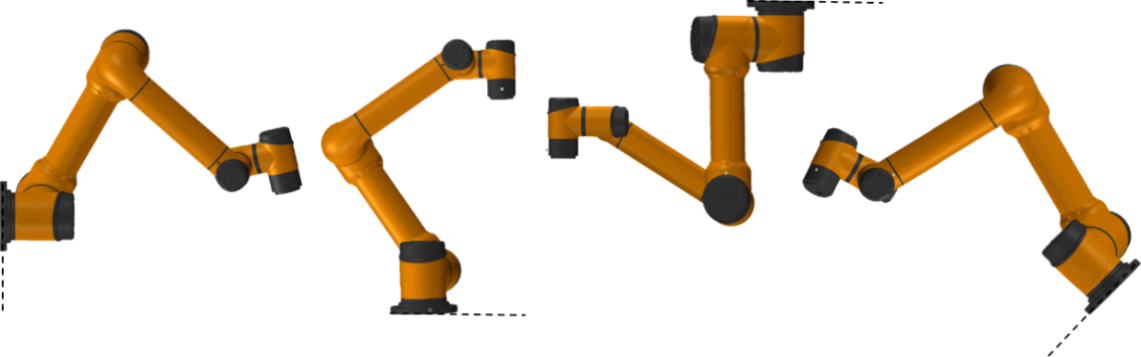
5.3.2 Installation of robot arm
The AUBO-S series robot arm features a 360° installation position and pose adaptation capability, and thus supports various installation methods including base mounting, ceiling mounting and wall mounting, as shown in Figure 5-2. After the robot arm is installed, the teach pendant software will automatically detect and adjust the robot arm's work parameters upon power-on.
For installation on the base, it is recommended to use four bolts for fastening, and to pre-install two positioning pins in holes with slightly smaller diameter to improve installation accuracy. For mechanical dimensions, refer to 4.4.4 Top view of pedestal.
| Sign | Description |
|---|---|
| 1. Ensure the robot arm is correctly and securely installed. 2. The robot arm should not be installed in water or in a humid environment unless it is stated to meet IP67 requirements. Otherwise, if the robot arm is submerged in water for a period of time, it may suffer damage. 3. Risk of tip-over: If the robot arm is not securely placed on a sturdy surface, it may tip over and cause injury. |
| 1. When installed on a base, the robot must be in a close contact with the base. 2. It is recommended to use a base contact surface with strong heat dissipation performance, such as a base made of full aluminum material. When the operating environment temperature exceeds 35°C, materials with strong heat dissipation performance are highly recommended. |
5.3.3 Install the end tool
The end tool flange is designed with several threaded holes and one positioning hole, allowing tools such as grippers to be mounted to the end of the robot arm. For mechanical dimensions of the tool flange, refer to 4.4.3 Mechanical dimensions of end flange.
| Sign | Description |
|---|---|
| 1. Ensure that the tool is correctly and securely installed. 2. Ensure the tool's safety structure is correct to prevent any parts from accidentally falling and causing danger. |
5.3.4 Protective Grounding
The power input terminal of the robot arm controller must be connected to a qualified protective grounding wire (PE wire), ensuring a sound electrical connection between the controller enclosure and the ground. It is strictly prohibited to power on the robot arm without connecting the protective grounding wire (PE wire).
Grounding Technical Requirements:
Cable Specifications: The protective grounding wire (PE) must use a copper-core cable with a cross-sectional area of ≥ 2.5 mm². The insulation layer must be intact. Connection terminals must be crimped securely using professional crimping tools; wrapping connections are strictly prohibited.
Grounding Resistance: After the grounding installation is completed, the grounding resistance must be measured between the robot arm's PE terminal and the ground using a grounding resistance tester. A resistance value of ≤ 4Ω is considered qualified.
Record Keeping: Grounding test records must be retained for filing, serving as critical evidence for safety compliance.
Safety Inspection and Maintenance:
Routine Inspection: Operators shall regularly inspect the connection status of the PE wire to ensure there is no loosening, breakage, or corrosion.
Maintenance Requirements: The grounding resistance must be retested after equipment maintenance, relocation, or reinstallation to ensure the continuous effectiveness of the grounding system.
Training Requirements: All operators must receive grounding safety training to understand the risks of not being grounded and the correct grounding methods.
| Sign | Description |
|---|---|
| 1. It is strictly prohibited to power on the robot arm without connecting the protective grounding wire (PE wire). Failure to provide proper grounding may result in electric shock, abnormal electromagnetic interference, or permanent damage to the equipment. 2. When the robot arm is not connected to the PE wire, the enclosure may carry an induced voltage of 15V~105V. Contact with the enclosure may cause discomfort such as tingling or numbness, which could lead to panic-induced incorrect operation, secondary hazards including collision with the robot arm, or accidental emergency stop activation. |
5.3.5 Cable connection
After the robot arm is installed, it must be correctly connected to the controller before being powered on for use. For cable connection methods, please refer to the user manual of controller.
5.4 Arm-side interfaces and buttons
5.4.1 Introduction
To meet the diverse needs of end tools, the AUBO-S series robot arm is designed with an 8-pin connector (hereinafter referred to as the "tool I/O interface"), a 4-pin connector (hereinafter referred to as the "tool RS485 interface"), and a drag teach button at the wrist. Among these, the tool RS485 interface and the drag teach button are optional.

1 - Drag teach button; 2 - Tool I/O interface; 3 - Tool RS485 interface
5.4.2 Tool I/O interface
The tool I/O interface integrates power supply and signal transmission functions, and supports the connection and control of end actuators such as grippers and sensors. It is externally connected by industrial-grade cables and internally equipped with eight functional cables (as shown in Figure 5-4 and Table 5-1). The power voltage, digital I/O interface mode, and I/O interface functions can all be configured in the teach pendant software. For configuration methods and functions, please refer to AuboStudio User Manual.
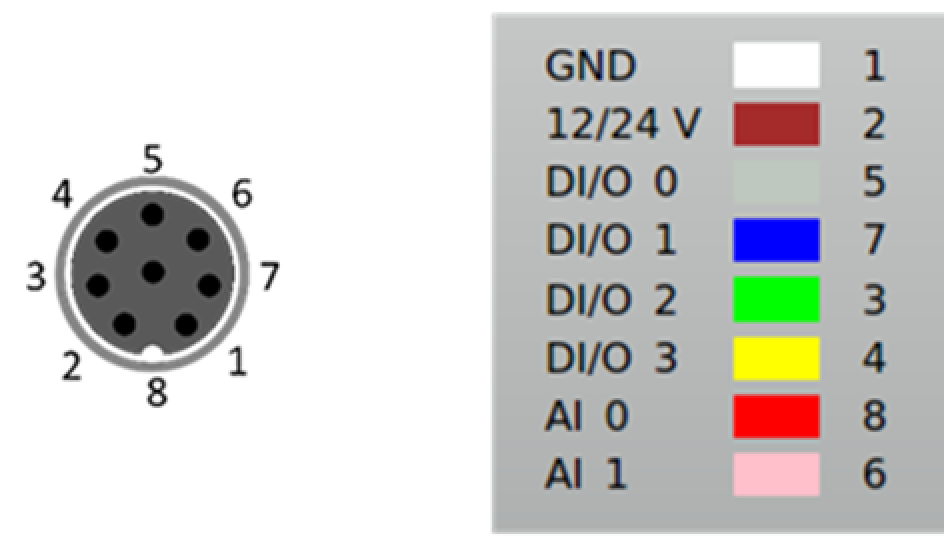
| Color | Signal | Pin | Color | Signal | Pin |
|---|---|---|---|---|---|
| White | GND | 1 | Green | DI/O 2 | 3 |
| Brown | 12/24V | 2 | Yellow | DI/O 3 | 4 |
| Gray | DI/O 0 | 5 | Red | AI 0 | 8 |
| Blue | DI/O 1 | 7 | Pink | AI 1 | 6 |
The digital I/O interface of the tool I/O interface adopts the NPN switching scheme:
Digital input mode: When the interface is activated, the connector is driven to connect to GND; when the interface is deactivated, it is open;
Digital output mode: A weak current pull-down resistor is equipped to ensure signal stability and reliability.
For detailed electrical parameters of the tool I/O interface, please refer to Table 5-2 and Table 5-4, with electrical tolerance within ±10 %.
| Parameters | Minimum value | Typical value | Maximum value | Unit |
|---|---|---|---|---|
| Power supply voltage in 24 V mode | 23 | 24 | 25 | V |
| Power supply voltage in 12 V mode | 11.5 | 12 | 12.5 | V |
| Power supply current in both modes | - | 0.8 | 1.0 | A |
| Parameters | Minimum value | Typical value | Maximum value | Unit |
|---|---|---|---|---|
| Input voltage range | 0 | - | 10 | V |
| Voltage resolution | - | 2.5 | - | mV |
| I/O type | Parameter | Minimum | Typical | Maximum | Unit |
|---|---|---|---|---|---|
| DI interface | Input voltage | -0.5 | - | Vout+2 | V |
| Logic low voltage | 0 | 1.5 | 2 | V | |
| Logic high voltage | Vout-4 | Vout | Vout+2 | V | |
| Input resistance | - | 4.3 | - | kΩ | |
| DO interface | Open-circuit voltage | Same as current power supply | |||
| Voltage at 1A input current | 0.35 | 0.4 | 0.85 | V | |
| Input current | 0.35 | 0.4 | 0.5 | A | |
| Current through GND | 0.35 | 0.4 | 0.5 | A | |
| AI interface | AI 0 | 0 | - | +10 | V |
| AI 1 | 0 | - | +10 | V | |
| Sign | Description |
|---|---|
| When connecting tools and grippers, ensure that interrupting the power supply will not cause any danger, such as the workpiece falling from the tool. |
5.4.3 Tool RS485 interface (optional)
The tool RS485 interface enables fieldbus communication, and supports direct communication and data exchange with various devices under the standard RS485 communication protocol. It is externally connected via industrial-grade cables, and internally equipped with four functional cables (as shown in Figure 5-5 and Table 5-5). Its power supply voltage is configured in the same way as the tool I/O interface. For configuration methods and functions, please refer to AuboStudio User Manual. For related electrical parameters, please refer to Table 5-2.
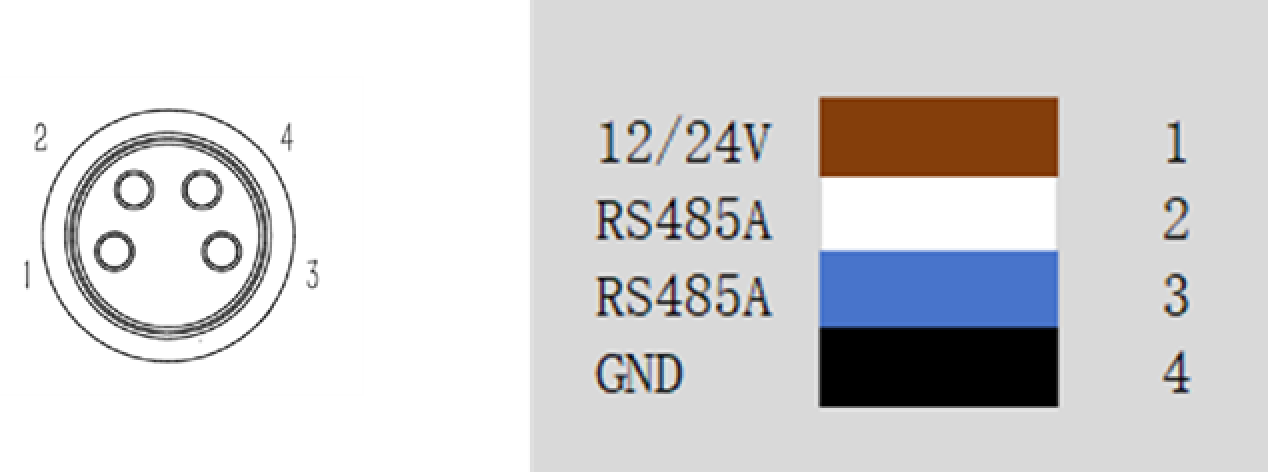
| Color | Signal | Pin |
|---|---|---|
| Brown | 12/24V | 1 |
| White | RS485A | 2 |
| Blue | RS485B | 3 |
| Black | GND | 4 |
5.4.4 Drag teach button
The drag teach button is a human-machine interaction component provided on the AUBO-S series robot arm. You can press and hold this button to enter drag teach mode, which allows you to easily move the robot arm. When the button is released, the robot arm will maintain its current pose and exit drag teach mode. This feature can be used in conjunction with the "trajectory recording" function. For details, please refer to AuboStudio User Manual.
6 Handling and Precautions
For hoisting the robot, appropriate measures shall be taken to position the moving components to prevent them from causing hazards due to unexpected movements during hoisting and transportation. During packaging for transportation, the robot shall be packed according to the packaging standards, and the required marks shall be placed on the outside of the packing box.
During transportation, ensure that the robot is stable and fixed in a proper position.
The controller should be lifted using the handle.
When moving the robot from its packaging materials to the installation position, hold the robot until all bolts on the robot base are fully tightened.
After securing, power on the robot and use the drag teach function to adjust the robot's pose as appropriate.
Keep the original packaging intact after transportation is complete. Store the packaging materials in a dry place in case you need to repack and move the robot in the future.
| Sign | Description |
|---|---|
| 1. Ensure that your back or other body parts are not overstrained when lifting the equipment. 2. All regional and national guidelines shall be followed. AUBO (Beijing) Intelligent Technology Co., Ltd. is not responsible for any damage caused during equipment transportation. 3. Ensure that the installation of the robot strictly follows the installation instructions in the manual. |
7 Maintenance and Repair
Maintenance and repair work must strictly comply with all safety instructions in this manual.
Maintenance, calibration, and repair must be carried out according to the latest service manual, which is accessible from the support website: www.aubo-robotics.cn. All dealers of AUBO (Beijing) Intelligent Technology Co., Ltd. are permitted to access this website.
Repairs must be performed by an authorized system integrator or AUBO (Beijing) Intelligent Technology Co., Ltd. Parts returned to AUBO (Beijing) Intelligent Technology Co., Ltd. shall be handled in accordance with the provisions of the service manual.
It is necessary to ensure the safety level specified for maintenance and repair work, comply with effective national or regional work safety regulations, and test all safety features to ensure they are functioning properly.
The purpose of maintenance and repair work is to ensure the normal operation of the system or to help restore it to a normal state in the event of a system failure. Repair includes fault diagnosis and physical repair.
The following safety procedures and warnings must be followed during operation of the robot arm or controller:
| Sign | Description |
|---|---|
| 1. Remove the main input cable from the back of the controller to ensure it is completely powered off. Take necessary precautionary measures to prevent others from reconnecting the system power during maintenance. After powering off, recheck the system to ensure a complete power cutoff. 2. Check the grounding connection before restarting the system. 3. Please comply with ESD (Electrostatic discharge) regulations when disassembling the robot arm or controller. 4. Avoid disassembling the power supply system of the controller. After the controller is turned off, its power supply system may retain high voltage for several hours. 5. Prevent water or dust from entering the robot arm or the controller. 6. Replace faulty components with new components with the same part number or corresponding components approved by AUBO (Beijing) Intelligent Technology Co., Ltd. 7. Immediately reactivate all disabled safety measures after completing this work. 8. Record all maintenance operations in writing and incorporate them in the technical documentation related to the entire robotic system. 9. The controller contains no parts that can be repaired by the end-user. If maintenance or repair service is required, please contact your dealer or AUBO (Beijing) Intelligent Technology Co., Ltd. |
8 Disposal
The AUBO robot must be disposed of in accordance with applicable national laws, regulations, and standards.
9 Quality assurance
9.1 Quality assurance of product
AUBO robots have an 18-month limited warranty.
If the new equipment and its components show defects due to poor manufacturing or poor materials within 18 months after being put into use, AUBO (Beijing) Intelligent Technology Co., Ltd. shall provide the necessary spare components for replacement or repair the related components.
All equipment or components replaced or returned to AUBO (Beijing) Intelligent Technology Co., Ltd. are owned by AUBO (Beijing) Intelligent Technology Co., Ltd.
If the product is no longer within the warranty period, AUBO (Beijing) Intelligent Technology Co., Ltd. reserves the right to charge the customer for replacement or repair fees.
Outside the warranty period, if the equipment exhibits defects, AUBO (Beijing) Intelligent Technology Co., Ltd. shall not be liable for any resulting damage or loss, such as production loss or damage to other production equipment.
9.2 Disclaimer
The "Product Quality Warranty" becomes void if the equipment defect is caused by improper handling or failure to follow the relevant information described in the User Manual.
Failures caused by the following situations are not covered by this warranty:
Products purchased from channels not authorized by AUBO;
Installation, wiring, or connection to other control equipment that does not comply with industrial standards or the requirements of the User Manual;
Use beyond the specified conditions or standards of the product;
Using this product for purposes other than those specified;
Operating environmental conditions that exceed the product's specifications;
Use in a grinding environment or other special environments without proper product protection;
Product damage caused by improper transportation;
Failures, damage, or indirect damage caused by accidents or human factors;
Failures, damage, or indirect damage caused by modifications;
Installation of parts or accessories that are not genuine;
Damage caused by modification, commissioning, or repair of genuine parts by a third party other than AUBO (Beijing) Intelligent Technology Co., Ltd. or its designated integrators;
Failures, damage, or indirect damage caused by natural disasters or other force majeure events;
Failures caused by reasons other than the responsibility of AUBO (Beijing) Intelligent Technology Co., Ltd., in addition to the situations mentioned above.
The following situations are not covered by the warranty:
The product traceability number cannot be identified.
The production date or warranty start date cannot be identified.
Changes to software or internal data.
The failure cannot be reproduced or identified by AUBO (Beijing) Intelligent Technology Co., Ltd.
Use of this product with radioactive equipment, in biological testing equipment, or for purposes deemed hazardous by AUBO (Beijing) Intelligent Technology Co., Ltd.
Appearance parts and wearing parts.
According to the product quality warranty agreement, AUBO (Beijing) Intelligent Technology Co., Ltd. only provides warranty commitments for flaws and defects in products and parts sold to distributors.
AUBO (Beijing) Intelligent Technology Co., Ltd. disclaims any other express or implied warranties or liabilities, including but not limited to any implied warranty of merchantability or fitness for a particular purpose. Furthermore, AUBO (Beijing) Intelligent Technology Co., Ltd. is not liable for any form of indirect or consequential damages arising from the related products.
10 Appendix A Glossary
Category 0 stop: The robot stops immediately when its power supply is cut off. This is an uncontrolled stop, and since each joint brakes at the maximum speed, the robot may experience a deviation from the programmed path. This protective stop should be used only when the safety-rated limit is exceeded or when an error occurs in the safety-rated part of the control system. For more information, please refer to EN ISO 13850:2008 or IEC60204-1:2006.
Category 1 stop: This stop mechanism is implemented to stop the robot by powering the robot, with the power supply cut off immediately after the robot has stopped. This is a controlled stop, and the robot will follow the programmed path. The power is cut off one second later or once the robot has come to a complete stop. For more information, please refer to EN ISO 13850:2008 or IEC60204-1:2006.
Category 2 stop: This stop is a controlled stop with power supplied to the robot, in which the robot stops all movements within one second. The safety-rated control system can keep the robot in the stopped position. For more information, please refer to IEC60204-1:2006.
Diagnostic coverage (DC): Diagnostic coverage (DC) is a measure for evaluating the effectiveness of diagnostics implemented to achieve the rated performance level. For more information, please refer to EN ISO 13849-1:2008.
Integrator: Integrator refers to the entity that designs the final installation of the robot, which is responsible for conducting the final risk assessment and must ensure that the final installation complies with local laws and regulations.
Mean time to dangerous failure (MTTFd): Mean time to dangerous failure (MTTFd) is a value obtained through calculation and testing to achieve the rated performance level. For more information, please refer to EN ISO 13849-1:2008.
Risk assessment: Risk assessment refers to the entire process of identifying all risks and reducing them to an appropriate level. Risk assessment should be documented and archived. For details, please refer to ISO 12100.
Performance level: Performance Level (PL) is a distinct level for describing the ability of each safety-related part of the control system to perform safety features under predictable conditions. PLd is the second highest reliability classification, meaning the safety feature is quite trustworthy. For more information, please refer to EN ISO 13849-1:2008.