视觉偏移示例
1.自定义坐标系固定,点位偏移
此工程是模拟一个最小的视觉偏移应用示例,点位偏移的值可依据视觉系统识别获取到的值,设置的偏移基准点是 take_photo。
1.1 前置准备
建立坐标系:在 AuboStudio 软件中单击左侧导航栏“配置 > 一般 > 坐标系”进入【坐标系】页面,单击【点】新建一个点坐标系
take_photo。- 当运动指令选择
take_photo坐标系时,后续运动将基于这个坐标系进行偏移。 - 坐标系以点的方式创建时,方向将与工具坐标系一致。
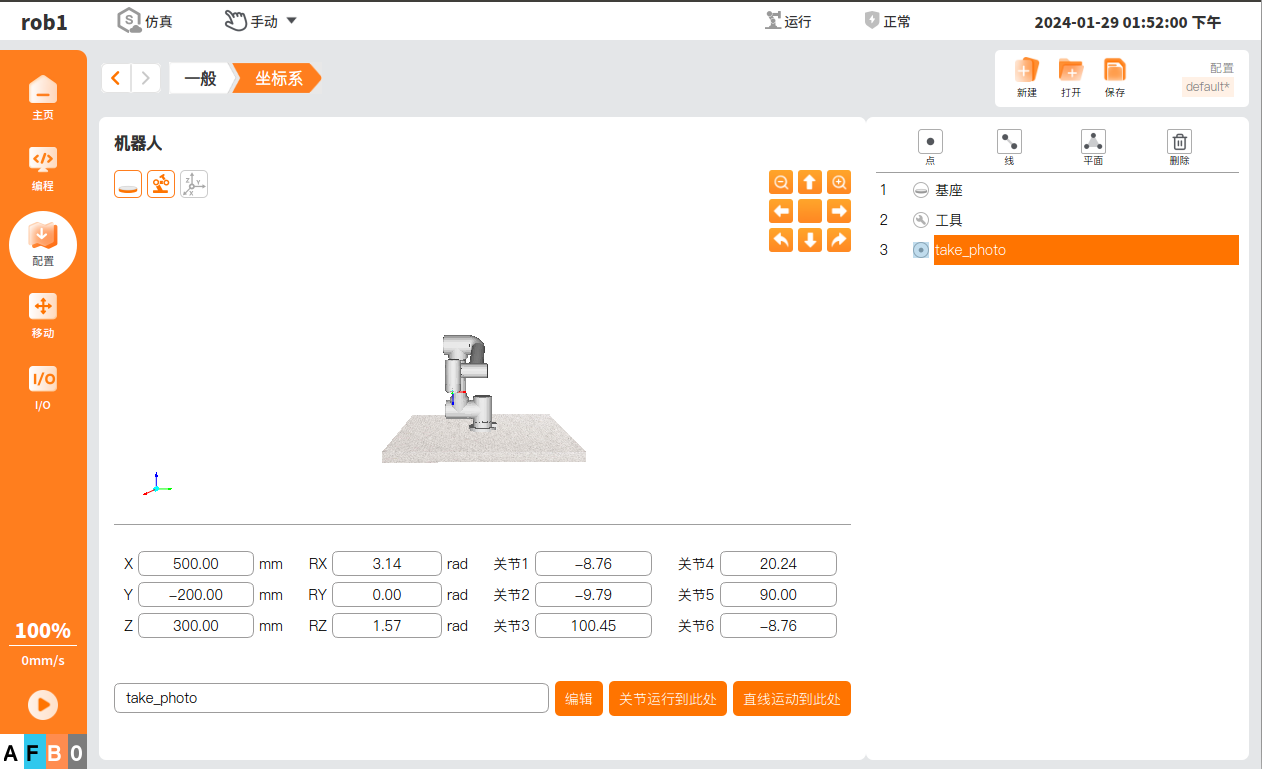
- 当运动指令选择
建立变量:单击左侧导航栏“配置 > 一般 > 变量”进入【变量】页面,单击【新增】新建变量
offset用来存储偏移后移动到的点位位姿offset={0,0,0,0,0,0}。变量
offset_x、offset_y、offset_z是相机识别到的实物相对于模板偏移的 x、y、z 三个方向的偏移值。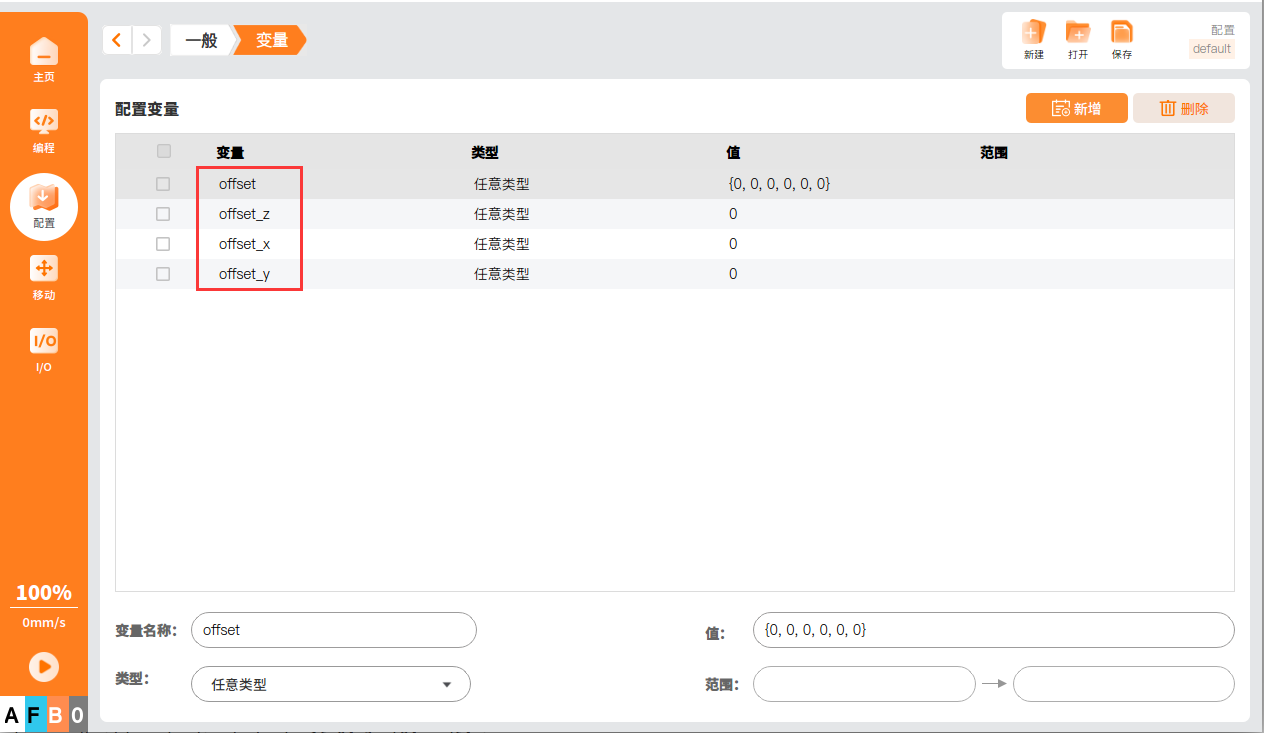
1.2 编写工程
将坐标系、变量与机器人运动关联,实现自定义坐标系固定点位迁移,操作如下:
- 设置坐标系:单击左侧导航栏“编程 > 命令”,选择需要实现偏移的路点单击页面左下角的【移动】,运动属性选择该点的【坐标系】为
take_photo。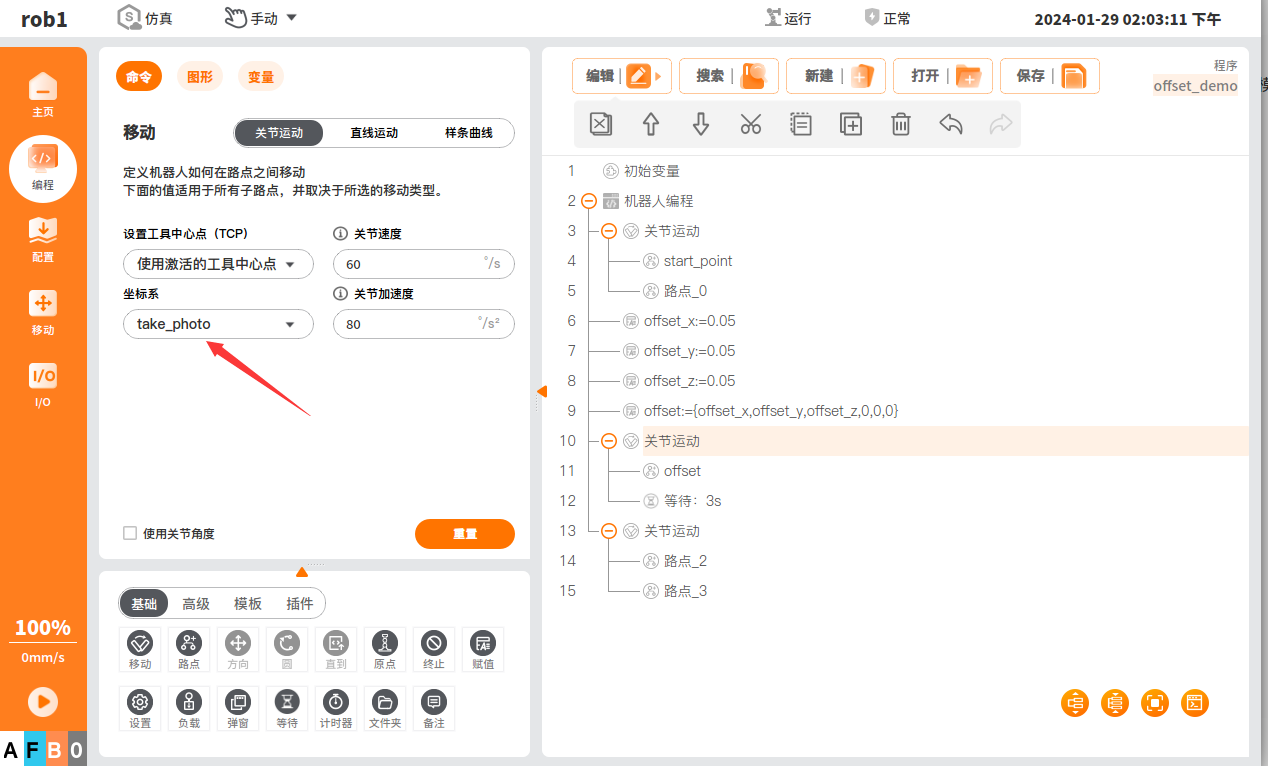
- 设置变量:单击页面左下角的【路点】并在【路点】页签选择【变量位置】,在【变量】下拉框中选择
offset,变量类型选择“位姿类型”。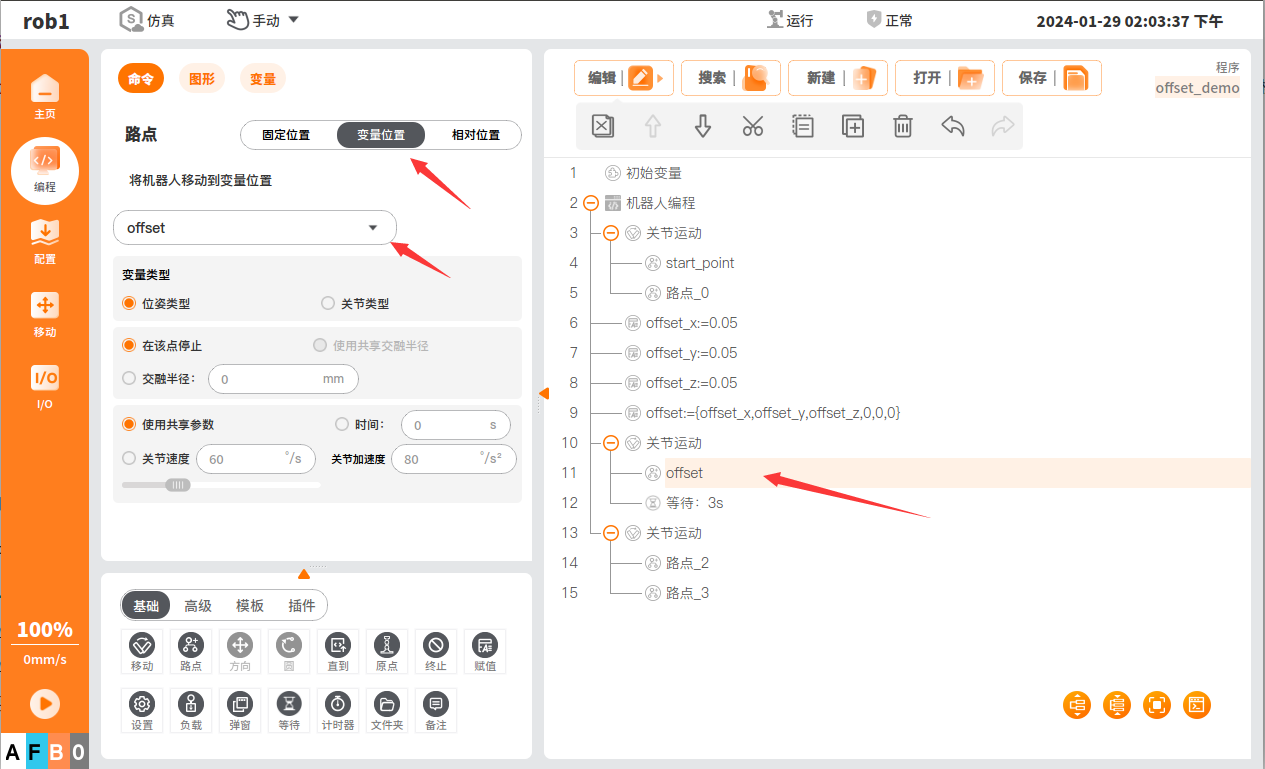
- 赋值偏移:单击页面左下角的【赋值】,变量选择
offset表达式输入{offset_x,offset_y,offset_z,0,0,0}。此时机械臂移动时,会自动以take_photo为基准,加上视觉识别的偏移量,移动到最终位置。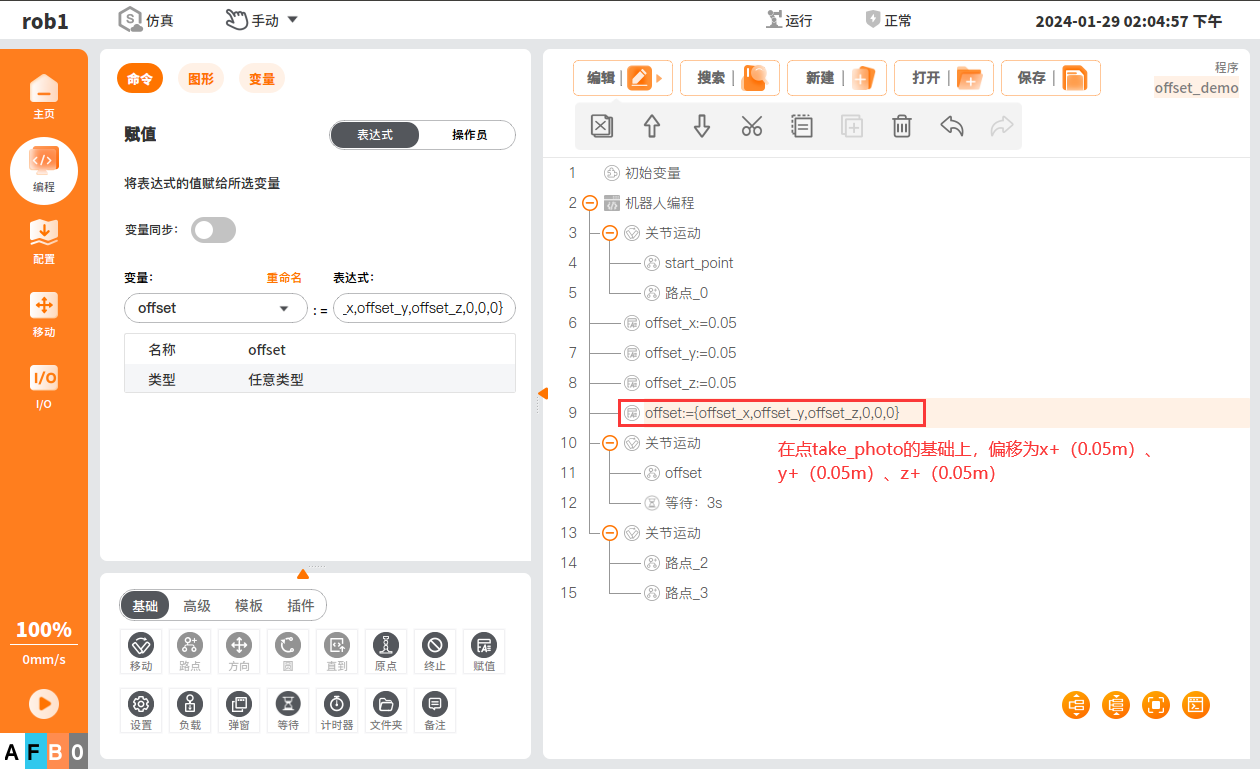
2.自定义坐标系,坐标系偏移
此工程是模拟一个最小的视觉偏移应用示例,坐标系偏移的值可依据视觉系统识别获取到的值,设置的偏移坐标系是 ref_coord。
2.1 前置准备
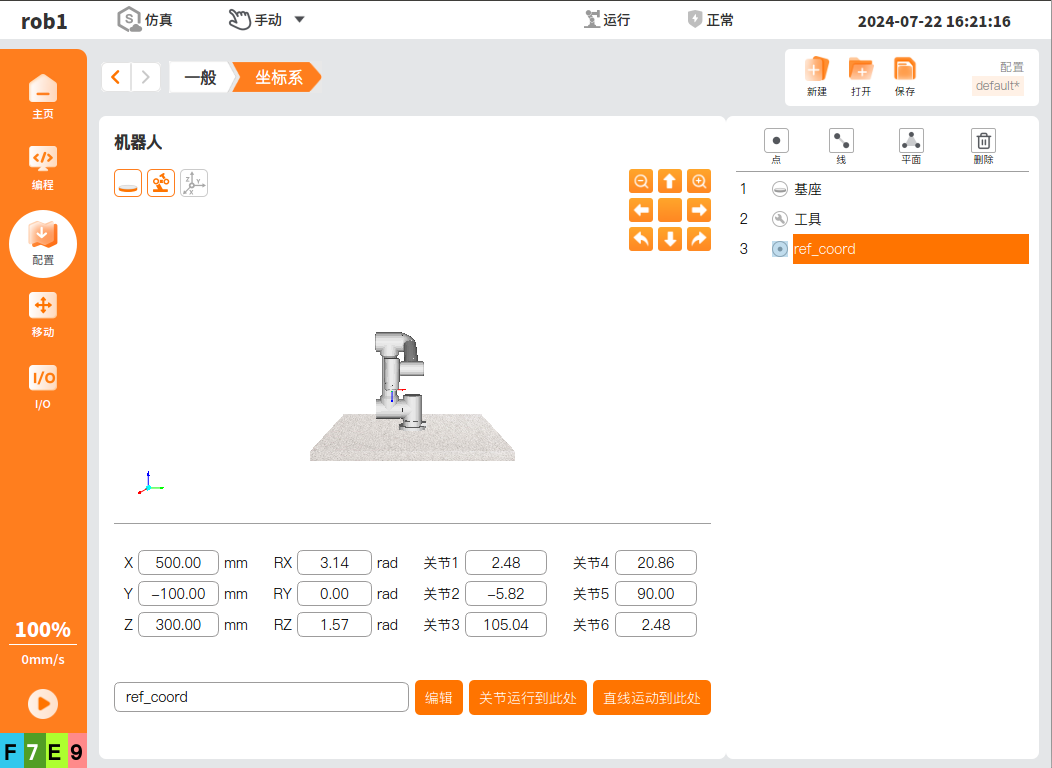
建立坐标系:在 AuboStudio 软件中单击左侧导航栏“配置 > 一般 > 坐标系”进入【坐标系】页面,单击【点】新建一个点坐标系 ref_coord。
- 当运动指令选择该
ref_coord坐标系时,后续运动将以这个坐标系作为参考基准。- 坐标系以点的方式创建时,方向将与工具坐标系一致。
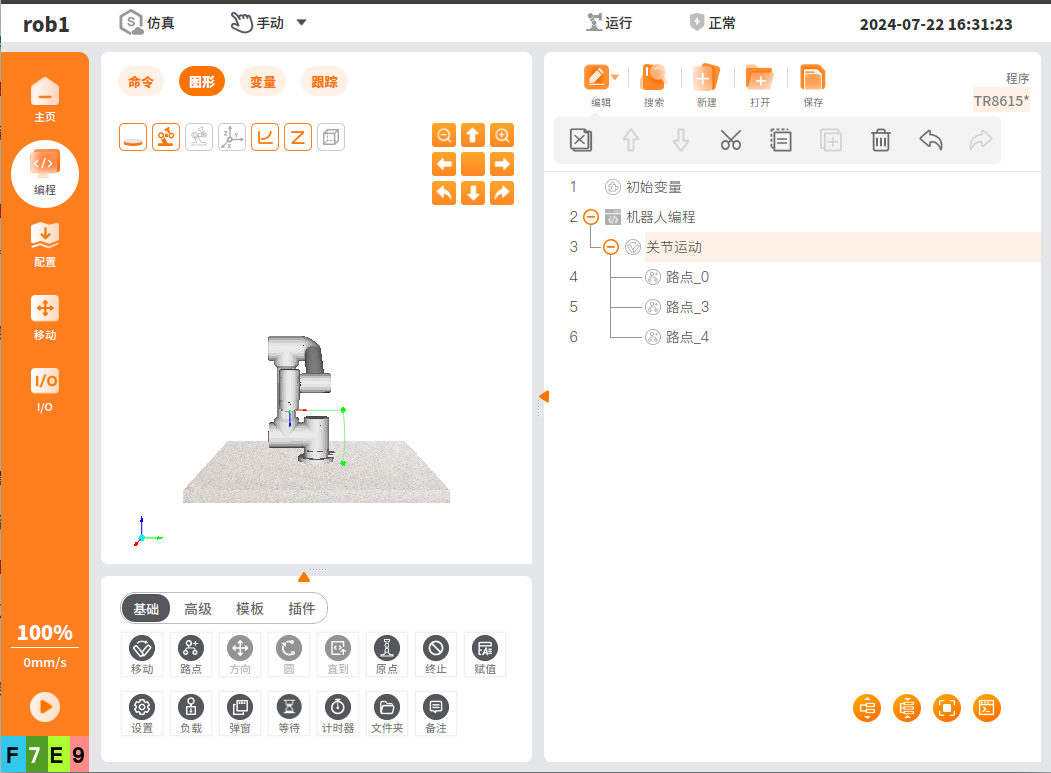
2.2 编写工程
将自定义坐标系与机器人路点绑定,实现坐标系偏移带动路点同步偏移,操作如下:
设置坐标系:单击左侧导航栏“编程 > 命令”,选择需要实现偏移的路点单击页面左下角的【移动】,运动属性选择该点的【坐标系】为
take_photo,并添加三个关联路点。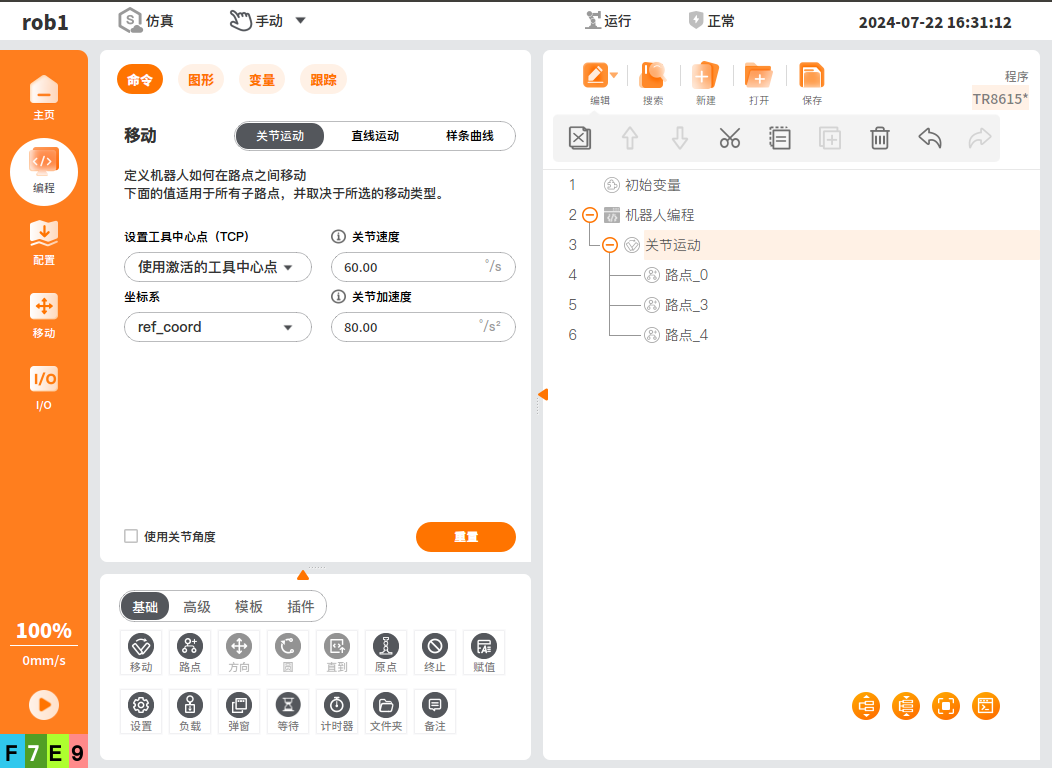
偏移
ref_coord坐标系:将自定义坐标系ref_coord进行偏移,所有关联该坐标系的路点会自动跟随偏移。本示例中将坐标系
ref_coordX 轴正方向移动 0.2 米,Z 轴负方向移动 0.2 米。移动前:
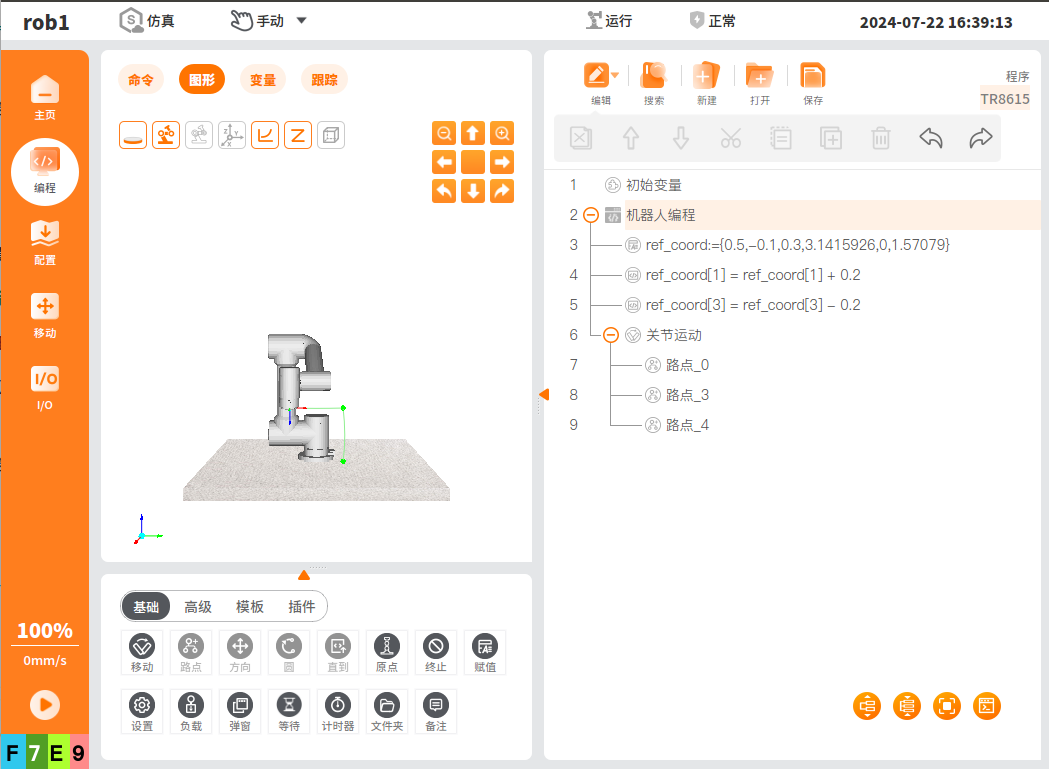
移动后:

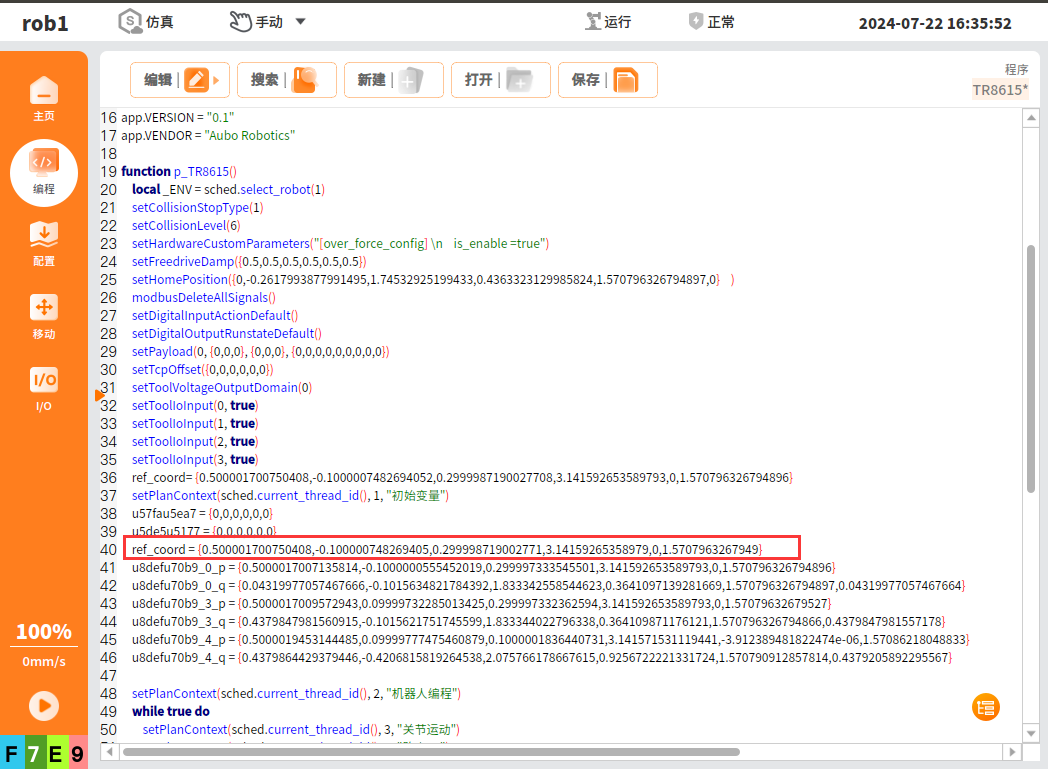
ref_coord坐标系位姿获取: 自定义坐标系ref_coord的位姿可通过单击【编程】页面右下角脚本标识符来获取。
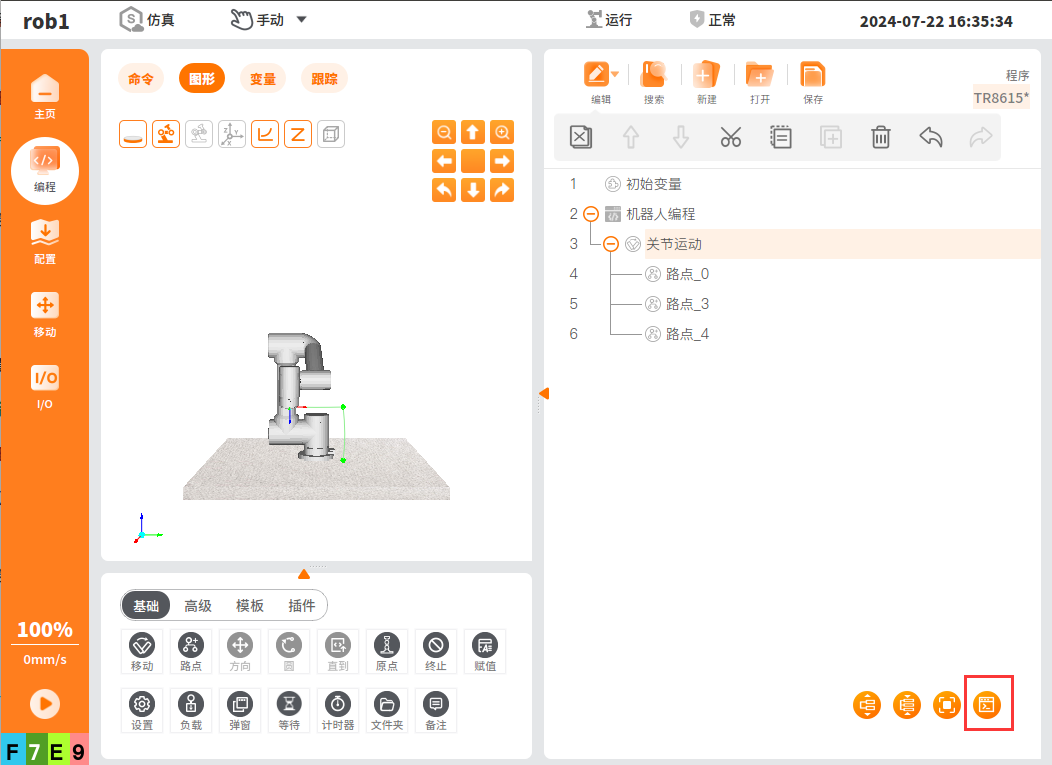 获取结果如下:
获取结果如下: