ARCS 系统奇异点问题处理指南
1.奇异点
1.1 奇异点简介
在六轴机器人运动过程中,机械臂通过 6 个关节协同配合,可以实现空间中任意位置和姿态的运动。但当机械臂运动到某些特殊位姿时,两个或多个关节的运动效果会相互抵消或重叠,导致机械臂末端无法沿某个方向继续移动——这就是奇异点(Singularity)。
1.2 AUBO 机械臂关节分类
| 关节 | 运动表现 | 奇异点触发条件与注意事项 |
|---|---|---|
| J1 | 绕竖直轴线水平旋转 | J5 旋转轴线位于 J1 旋转轴线正上方时,易触发肩部奇异点。 |
| J2 | 驱动大臂抬升、俯仰摆动 | 用于调节作业高度,一般不会独立形成奇异点姿态。 |
| J3 | 控制小臂伸展、折叠 | 关节角度趋近 0° 或 180°(小臂完全伸直 / 完全折叠),会触发肘部奇异点。 |
| J4 | 驱动腕部整体旋转 | 奇异姿态下该关节极易出现瞬间失控超速旋转,为受影响最显著关节。 |
| J5 | 控制末端工具俯仰摆动 | 关节角度趋近 0° 或 ±180°(腕部完全展平),易触发腕部奇异点。 |
| J6 | 驱动末端法兰盘自转 | 自身回转轴线与 J4 回转轴线共线时,易触发腕部奇异点。 |
1.3. 奇异点类型及形成条件
对于 AUBO 六轴工业机械臂,奇异点主要分为以下三种。
肩部奇异点
- 触发条件:当 J5 旋转轴线与 J1 旋转轴线处于同一垂直线上时触发。
- 易发姿态:与单一关节角度无关,通常发生在机械臂“直立指天”或“向内折叠”使得腕部正好位于基座正上方时。
- 表现现象:机械臂运动过程中,当腕部中心 J5 悬停在基座 J1 轴正上方时,转动 J1 只能使机械臂原地自转,无法带动末端向前或向后平移。系统为了维持原有直线轨迹,会强迫 J1 关节以极高的速度来弥补位移(即算法上的“速度发散”),导致其瞬间极速反转,最终触发过载报警并紧急停机。
肘部奇异点
- 触发条件:当机械臂处于“完全伸直”或“完全折叠”状态时触发。即 J2 关节、J3 关节和腕部中心点连成一条直线。
- 易发角度:J3 关节角度 = 0° 或 180°。
- 表现现象:此时机械臂达到了其工作半径的物理极限,无法继续沿手臂延伸的方向进行直线运动。
腕部奇异点
- 触发条件:当 J4 关节的旋转轴线与 J6 关节的旋转轴线共线(重合)时触发。
- 易发角度:J5 关节角度 = 0° 或 ±180°。
- 表现现象:此时 J4 和 J6 的旋转效果在空间上完全重叠(转动 J4 相当于转动 J6),导致机械臂在此姿态下丢失了一个旋转自由度,极易引起 J4 关节瞬间极速反转。
1.4 奇异点的危害
关节超速与电机过载: 在奇异点附近,系统逆解运算会导致个别关节(如 J4 或 J6)接收到异常高的速度指令(理论可达无限大),迫使电机瞬间超出物理极限,直接引发过载报警甚至烧毁驱动器(若无保护机制时)。
减速器剧烈机械冲击: 异常的瞬间超速与随后的急停会产生巨大扭矩,直接冲击精密减速器,容易导致齿轮剧烈磨损、精度下降甚至直接碎裂。
轨迹突变与严重碰撞风险: 为强行维持空间直线轨迹,机械臂姿态会发生不可预测的剧烈“翻转”或“扭转”,极大增加与周边工装夹具及现场人员发生严重碰撞的安全隐患。
2. AUBO ARCS 系统奇异点处理机制
当 ARCS 系统检测到机械臂运动中即将触发奇异点时,为避免机械臂受到损伤,将会立即中止机械运动,并以弹窗形式提醒用户路点设置有误。
2.1 模拟测试步骤
接下来以肘部奇异点为例介绍在使用 ARCS 系统控制机械臂的情景。
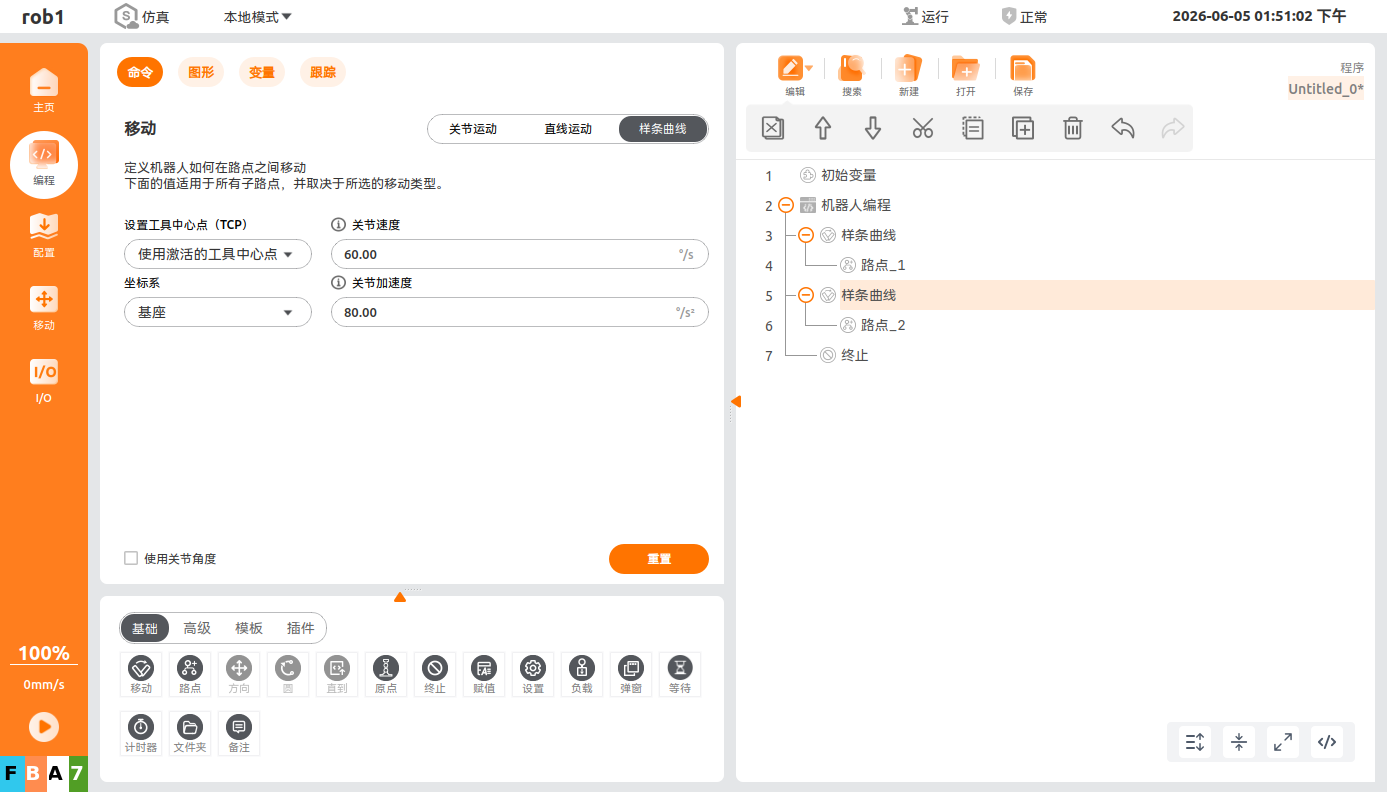
在程序编辑界面编写运动程序,模拟机械臂从安全正常位姿向奇异点位运动。
说明:
- 为复现奇异触发场景,移动方式选用严格遵循笛卡尔空间轨迹约束(即要求工具末端在空间中走出绝对精准的路线)的【样条曲线】。
- 该模式全程 TCP 精准跟随预设空间轨迹,逆解运算(ARCS 系统计算各关节需要分别转多少度来配合这条路线)易触发奇异点。
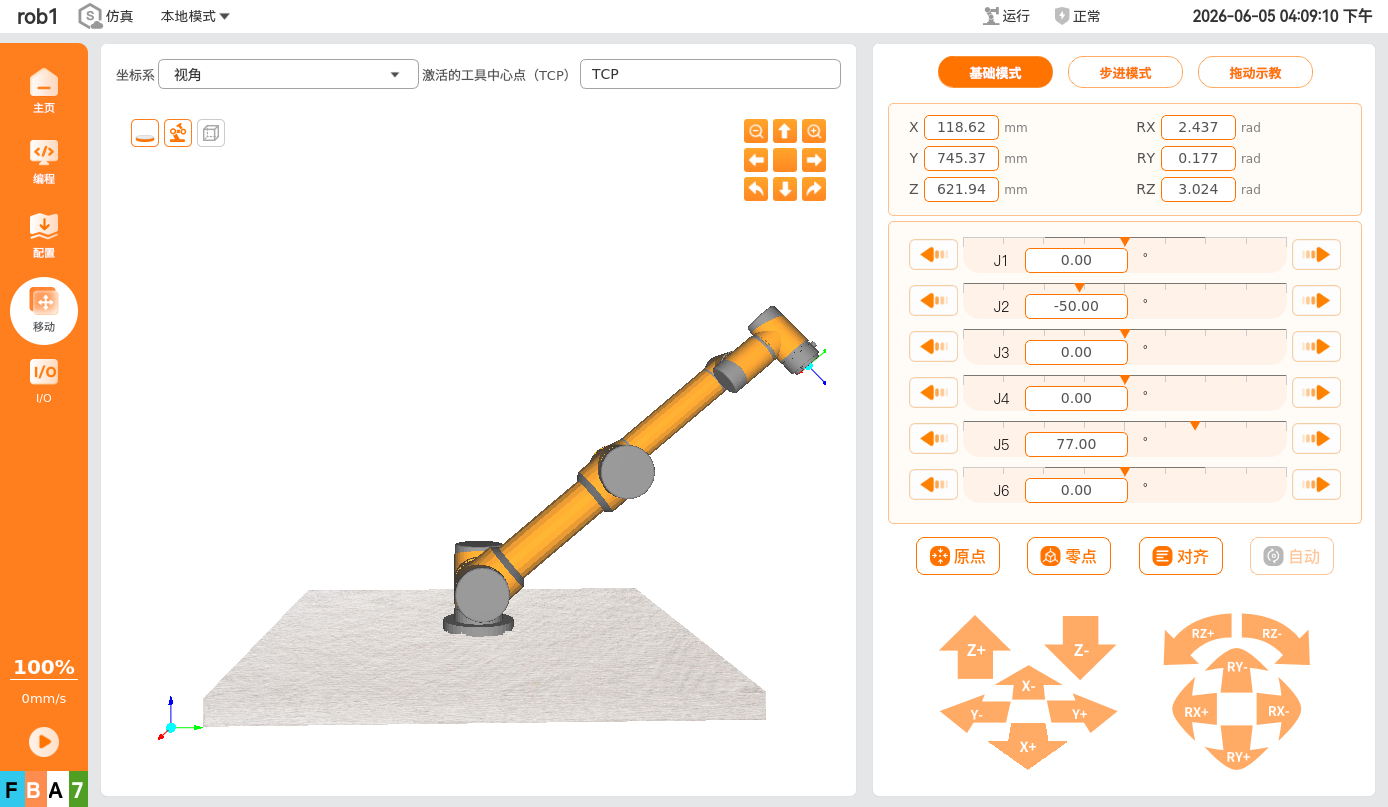
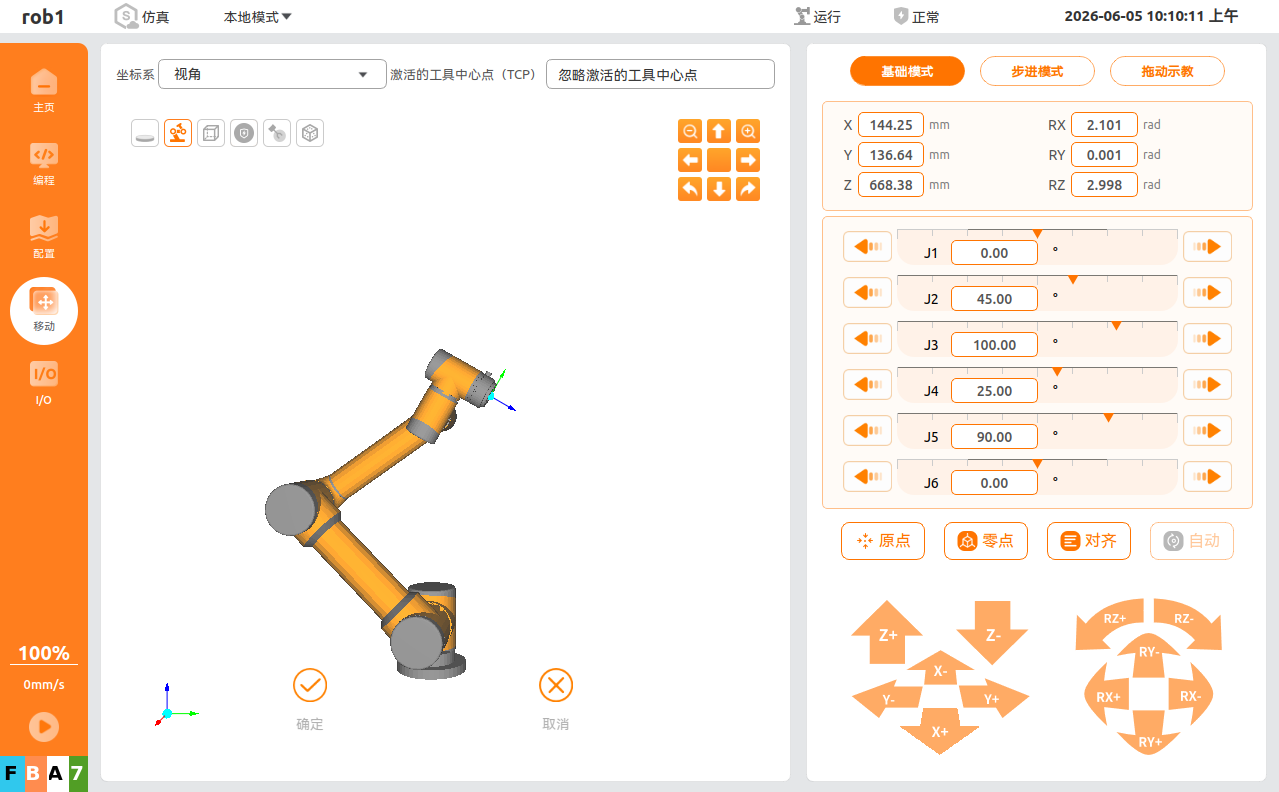
在程序中设置路点 1。
说明:
该点位为机械臂正常工作位姿,J1 ~ J6 关节参数如界面所示,无奇异风险。
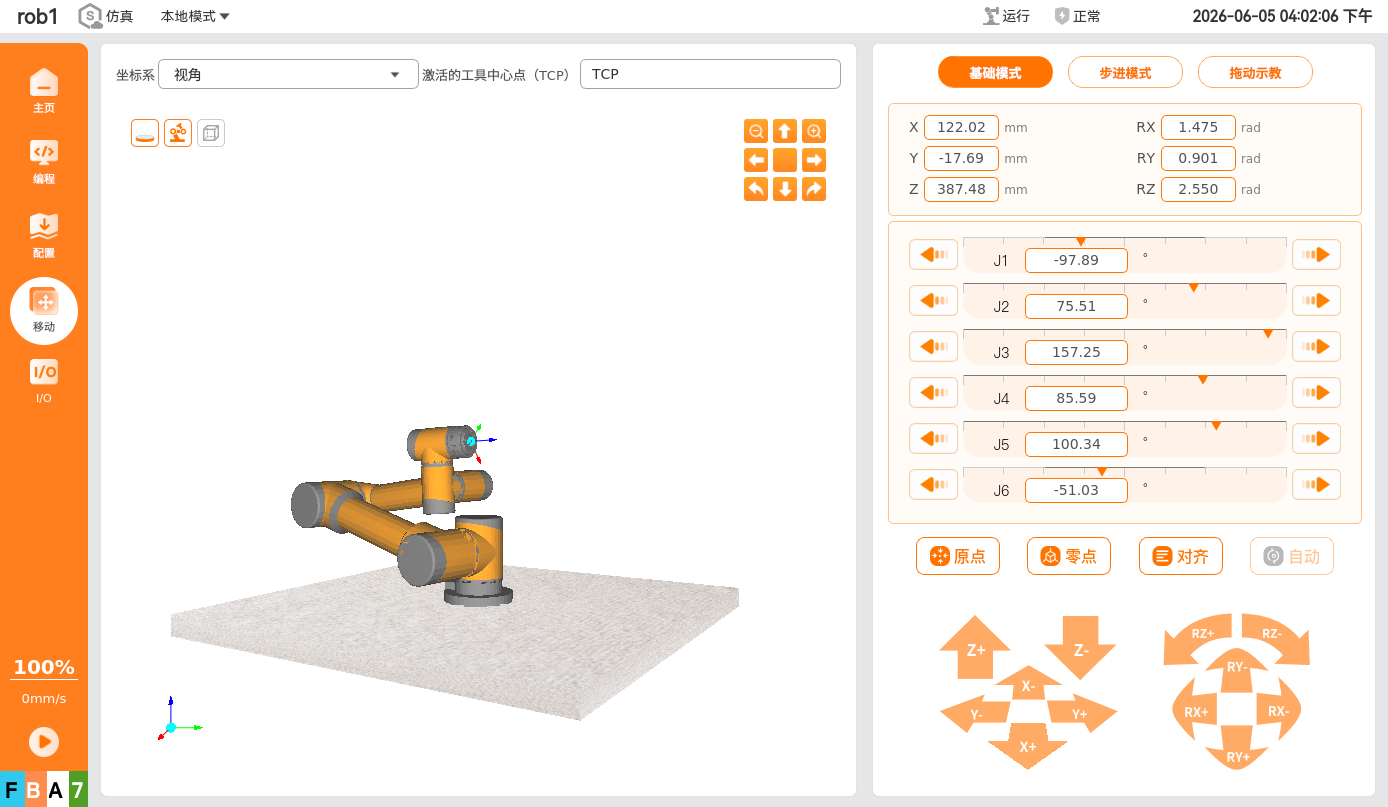
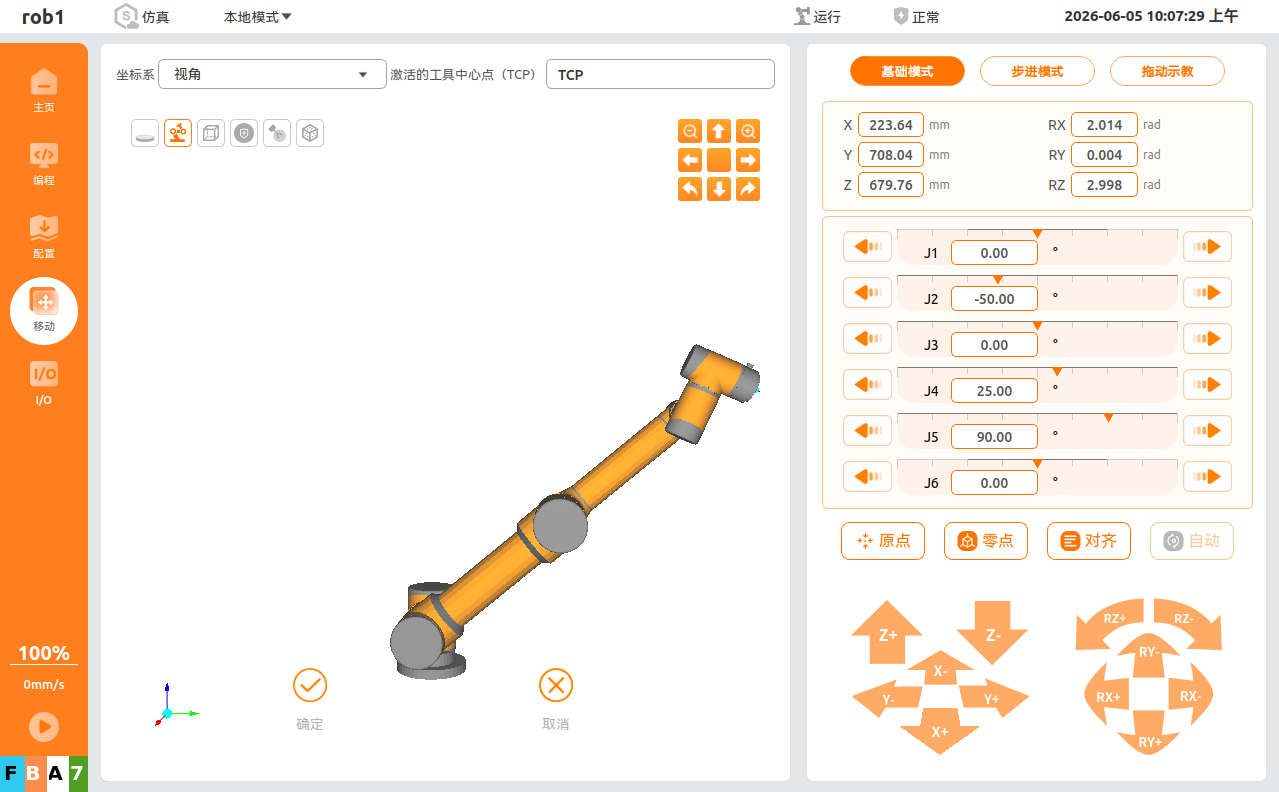
在程序中设置路点 2。
说明:
此路点 J3 为 0°,机械臂在运动至路点 2 的过程中将触发肘部奇异。
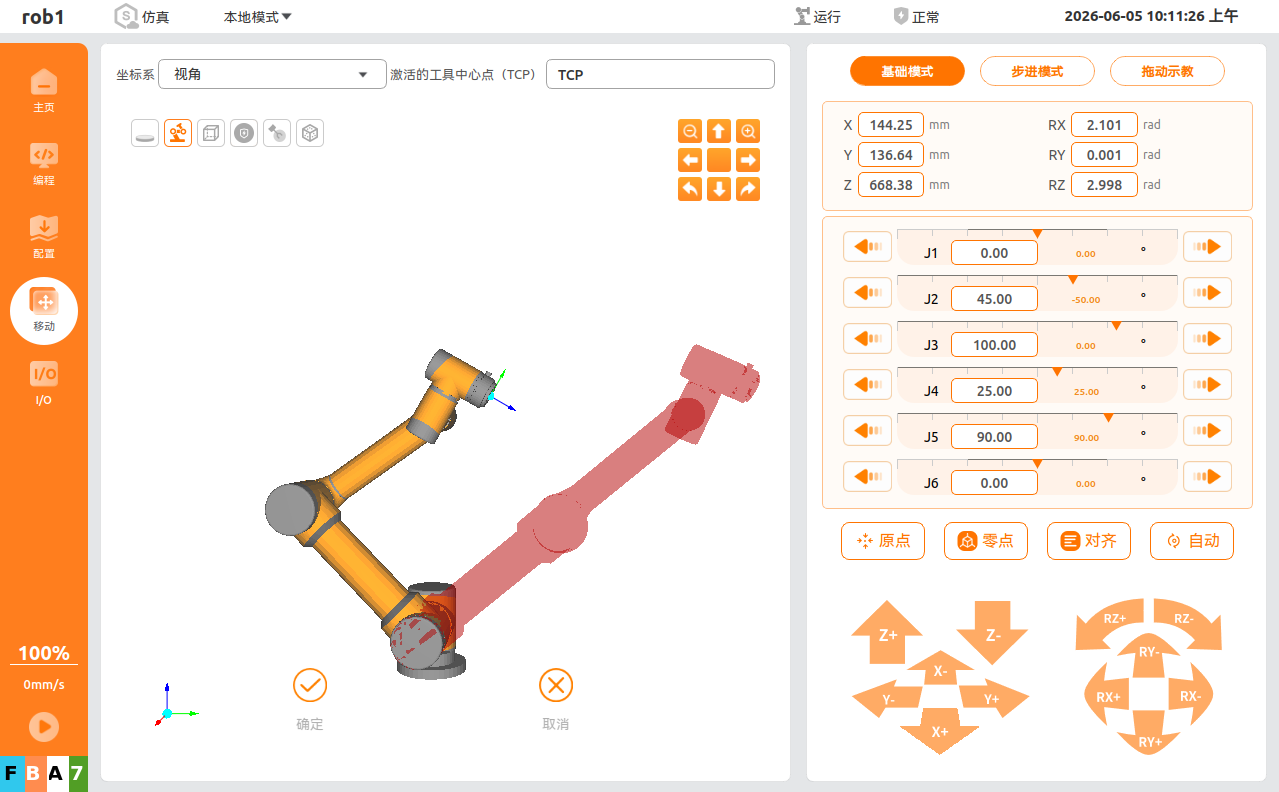
设置完成后,界面中实体模型位于路点 1 位置,红色虚影表示路点 2 的目标位姿。
保存程序后,单击软件左下角
 启动程序。ARCS 系统实时校验路径,预判行进路径途经奇异点,触发安全保护逻辑:即刻终止程序运行,弹出异常告警弹窗。
启动程序。ARCS 系统实时校验路径,预判行进路径途经奇异点,触发安全保护逻辑:即刻终止程序运行,弹出异常告警弹窗。
2.2 使用 ARCS 系统如何避免出现奇异点
将移动方式修改为【关节运动】或利用【直线运动】的算法优化,可有效规避或缓解奇异点引发的停机问题。
移动方式修改为【关节运动】
在此模式下,系统不要求工具中心点(TCP)严格遵循笛卡尔空间轨迹,而是直接计算并执行各关节从起点到终点的角度变化。由于无需进行实时的逆运动学求解,彻底避免了因空间死角导致的关节瞬间超速要求,是最安全、最彻底的奇异点规避方案。
移动方式修改为【直线运动】
相比样条曲线严苛的位姿连续性要求,直线运动的轨迹约束相对简单。ARCS 系统的底层插补算法在处理两点间的直线运动时,若检测到接近奇异点,底层插补算法自动微调 TCP 姿态、平滑降速优化轨迹,从而有效缓解速度突变并避免异常中断。
此时,虽然示例程序中将路点 2 的 J3 关节角度设为 0°,但在直线运动模式下,ARCS 系统的底层插补算法会在运动终止时将其微调为 0.26°,从而成功规避奇异点。
警告:
此运动方式并不能完全避免出现奇异点,在编辑程序时,应尽量避免将路点设置为易发奇异点的角度。