现场总线
用户可以设置用于 AuboStudio 能接受的实时分布式控制的工业计算机网络协议:EtherNet/IP、Modbus、PROFINET。
Modbus
Modbus 简介
Modbus 是工业自动化控制系统中一种重要的通信协议,具有侦错能力强、数据传输量大、实时性好等特点。外部设备(如 PLC)可通过 Modbus 协议与机器人建立连接,机器人也可作为 Modbus 从站与外部设备进行通信。
Modbus 协议包括 Modbus RTU 和 Modbus TCP 两个版本。
- Modbus RTU:使用串行通信,数据采用一种二进制的、紧凑的方式表达,使用带有循环冗余校验的校验和。Modbus RTU 主要用于工业和系统自动化应用,其设备间的通信距离较长。
- Modbus TCP:使用 TCP/IP (如以太网)连接,不需要校验和计算。与 Modbus RTU 相比,Modbus TCP 的通信速度更快,可连接的设备更多。
用户可在系统中配置 Modbus 设备信息,与指定 IP 的 Modbus 设备建立连接。
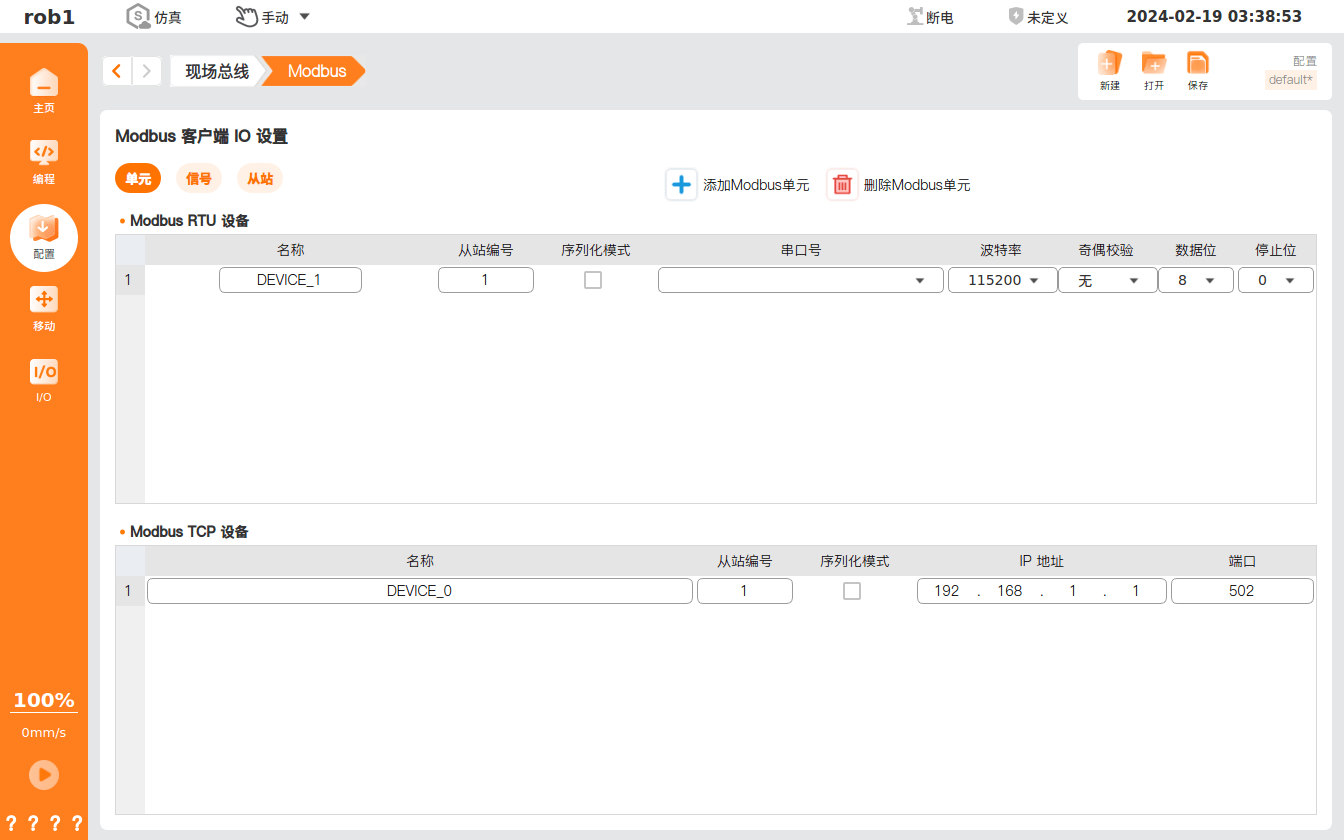
Modbus 单元管理
- 将 Modbus 设备与控制器通信接口连接。
- “配置 > 现场总线 > Modbus > 单元”,单击【添加 Modbus 单元】,选择 Modbus 单元模式,自定义设备名称、从站编号,设置 Modbus 设备相关参数。
- 选中需要删除的设备,单击【删除 Modbus 单元】即可删除该设备。
Modbus 信号管理
- Modbus 设备增加后,"配置 > 现场总线 > Modbus > 信号",单击【添加 Modbus 信号】,支持设置【名称】、【设备名称】、【类型】、【信号地址】及【值格式】。
- 本系统提供批量增加 Modbus 信号,单击【批量添加 Modbus 信号】,自定义信号名称,设置设备名称、类型等参数。
- 已添加的 Modbus 信号可以自定义功能,具体请参见 I/O 设置。
- 选中需要删除的信号,单击【删除 Modbus 信号】删除该信号。
Modbus 从站管理
机器人也可做为 Modbus 从站,具体请参见《ARCS Modbus 使用指南》。
PROFINET
PROFINET 是一种网络协议,用户可启用或禁止机器人与 PROFINET 控制器的链接。
EtherNet/IP
EtherNet/IP 简介
EtherNet/IP 是基于 TCP/IP 协议栈的工业以太网协议,由 ODVA(开放设备网供应商协会)制定,广泛应用于工业自动化设备间的实时数据交互。其核心优势包括:
- 兼容性强:支持与 PLC、机械臂、传感器等多种工业设备联动,兼容主流厂商(汇川、欧姆龙、西门子等)设备;
- 实时性高:采用“生产者 - 消费者”通信模型,可实现毫秒级数据传输,满足工业场景下的实时控制需求;
- 配置灵活:通过 EDS(电子数据手册)文件标准化设备描述,简化不同设备间的适配流程。
使用方法
1. 硬件连接
- 将 ARCS 控制器通过网线连接到工业网络。
- 确保网络参数配置正确。
- 检查物理连接状态是否正确。
2. EIP 服务配置
在示教器主页依次单击"配置 > 现场总线 > EtherNet/IP",即可对 EIP 服务进行配置。
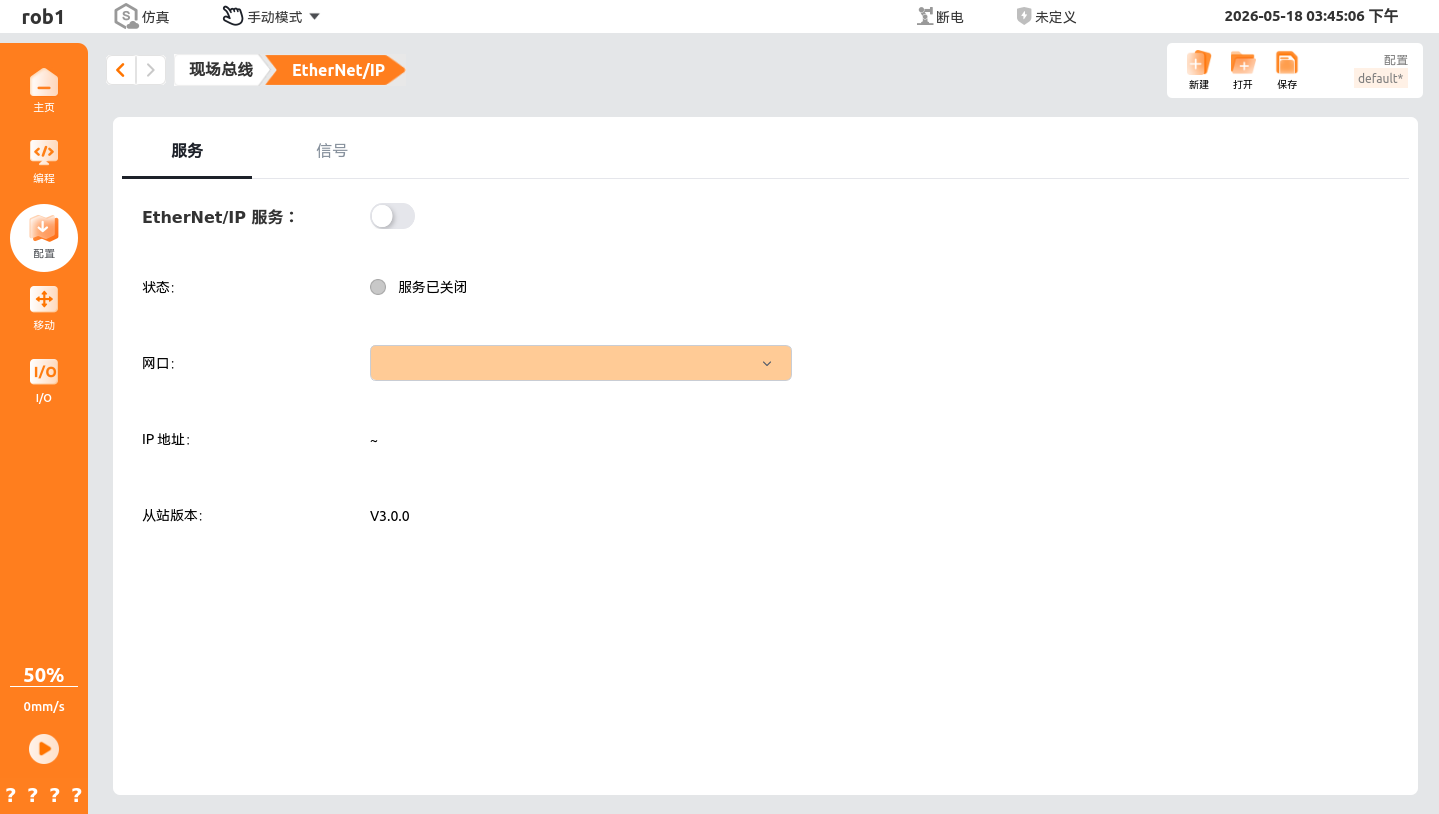
EIP 服务页面功能:
- EtherNet/IP 服务:打开/关闭EIP服务。
- 状态:显示服务已关闭/主站已断开/主站已连接。
- 网口:默认当前激活的网口,服务关闭时可手动选择。
- IP 地址:显示当前激活的网口 IP 地址。
- 从站版本:从站版本显示 显示 EIP 软件版本号(主站连接后显示)。
EIP 信号页面功能:
- 信号列表:EIP 信号列表。
- 新增:新增 EIP 信号。
- 删除:删除 EIP 信号。
- 名称:支持中/英文名称。
- 信号类型:
- 输入:即输入信号,用于接收外部设备(如PLC、传感器)发送的控制指令或状态反馈信号。
- 输出:即输出信号,用于向外部设备发送机器人状态、执行结果或控制指令信号。
- 地址偏移.位偏移:
- 偏移地址:
- 输入:88-150(仅偶数)。
- 输出:182-244(仅偶数)。
- 位偏移量:二进制布尔类型位偏移(0~15)。
- 偏移地址:
- 类型:布尔型、有符号整数、无符号整数、浮点数、交换浮点数、二进制、十六进制。
3. 编程使用
在程序中直接使用 EIP 信号,无需通过服务器寄存器或 Modbus 间接读写:
| 编程节点 | EIP使用 |
|---|---|
| 赋值 | 可使用 EIP 输入/输出信号作为变量 |
| 设置 | 可设置 EIP 输出信号值(寄存器和布尔类型) |
| 等待 | 等待 EIP 信号满足条件(如 EIP_1=88, EIP_2=true) |
| 直到 | EIP 条件判断,满足则跳过方向节点 |
| 循环 | EIP 条件作为循环条件 |
| 如果/否则如果 | EIP 条件作为分支判断 |
| 分支 | EIP 条件作为分支表达式 |
| 子程序 | 调用 EIP 子程序信号 |
4. IO监控
在 IO 界面直接监控 EIP 信号值,格式与信号配置的数据类型一致。