I/O 配置
【配置 > I/O 设置】可设置供用户使用的 I/O 口的功能,包括数字 I/O、模拟 I/O、工具 I/O 口等。部分型号控制器的安全 I/O 未赋值时可做通用 I/O 使用,具体请参见硬件用户手册。
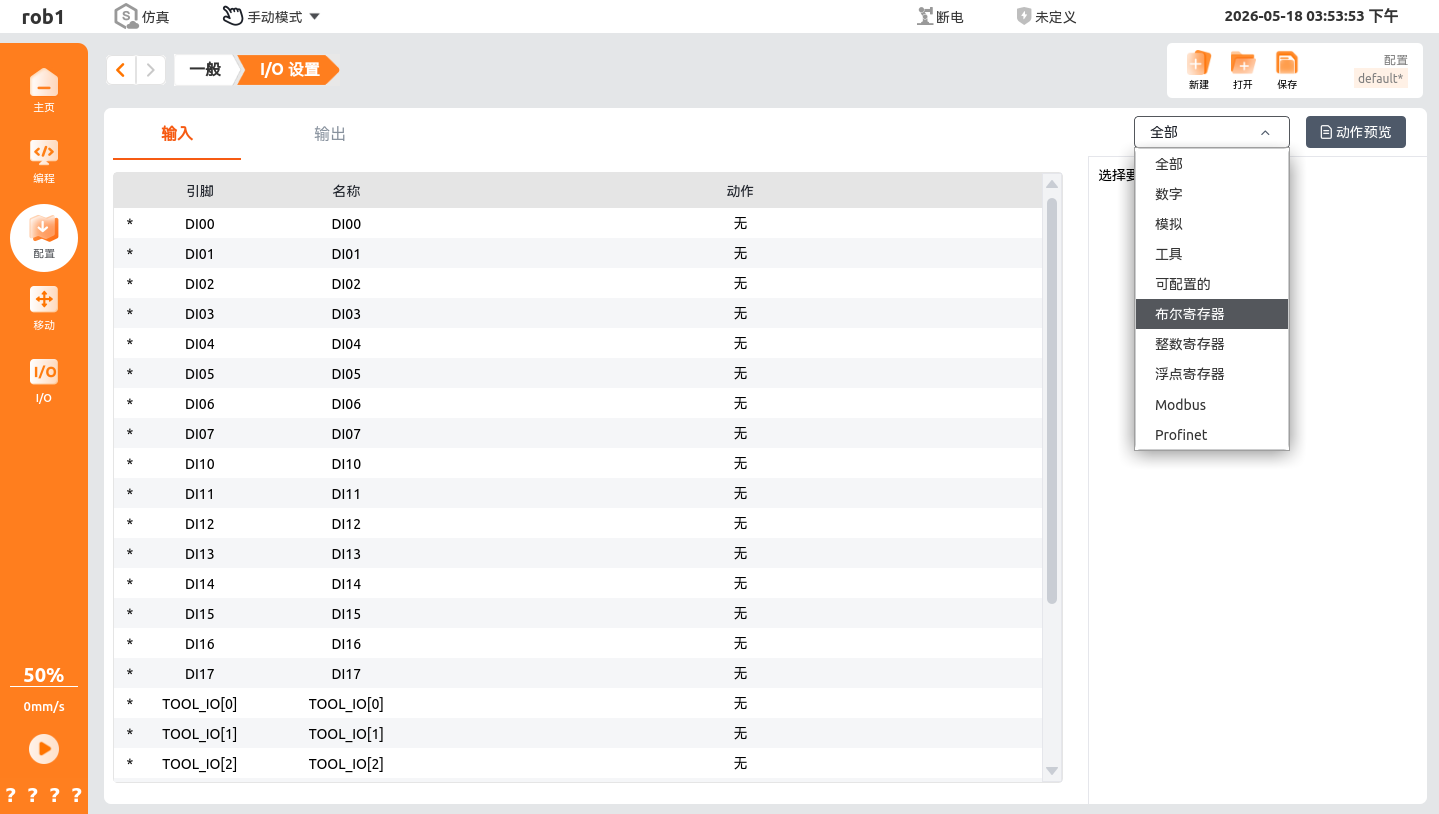
全部:根据信号类型筛选 I/O 列表中的显示,信号类型包括模拟、数字、工具、Modbus 等。
动作预览:显示所有用户可使用的 I/O 信号。
输入:显示/设置所有用户可使用的输入 I/O 信号。
输出:显示/设置所有用户可使用的输出 I/O 信号。
Pin:显示当前选择的 I/O 信号接口编号。
名称:显示当前选择的 I/O 名称。单击可重命名该名称。
恢复默认:重命名 I/O 名称后会出现该按钮,单击可恢复默认 I/O 名称。
I/O 选项卡控制:设置 I/O 是否能够在【I/O】选项卡手动控制。
- 启用:允许在【I/O】选项卡手动控制该输出口的信号。
- 仅限手动模式:仅当在手动模式下,允许在【I/O】选项卡手动控制该输出口的信号。(状态为 "*")
- 禁用:禁止在【I/O】选项卡手动控制该输出口的信号。
程序中的动作:设置当输入/输出口发出信号时触发的动作,单击出现下拉框,在下拉框中选择系统预定义的动作。
输入动作
动作 说明 拖动示教 触发后机器人进入拖动模式,操作人员可手动移动机械臂。 移动至原点 触发此信号后,机器人将按照预设路径自动回零位或起始点。 开始程序 通过外部信号启动当前加载的工程项目。 停止程序 通过外部信号彻底终止正在运行的程序。 暂停程序 通过外部信号使程序运行暂时中断,机器人保持当前姿态。 弹窗解除 当示教器界面出现提示弹窗或非致命警告弹窗时,通过此信号远程模拟点击"确认"或"关闭"。 机器人上电 通过外部信号开启机器人本体伺服电机的电源(使能)。 机器人断电 通过外部信号切断机器人本体伺服电机的电源(去使能/下电)。 恢复程序 在程序处于暂停状态时,通过此信号使程序从断点处继续运行。 开始传送带跟踪 启动传送带跟踪功能,使机械臂与传送带上的工件保持同步运动。 传送带触发队列(低电平) 通常用于停止或退出传送带跟踪模式。 解除防护停止 在防护性停止条件消除后,通过此信号恢复系统正常状态。 强制恢复程序 通常指在非标准暂停(如报警解除后)情况下,强制程序从当前位置或指定逻辑点尝试恢复运行。 加载程序 通过外部信号触发机器人加载预设的工程文件(通常需配合特定的参数或文件名)。 输出动作
动作 说明 程序停止时低 当机器人程序停止执行时,该端口输出低电平信号。 程序停止时高 当机器人程序停止执行时,该端口输出高电平信号。 程序运行 当机器人程序处于正在执行状态时,该信号处于激活有效状态。 程序已暂停 当程序执行被临时挂起时,该信号处于激活有效状态。 到达原点 当机器人末端法兰或所有关节轴到达预定义的原点位置时,该信号激活。 拖动示教 指示机器人当前处于零力控制模式,允许操作员手动拖动机械臂进行示教。 机器人上电 当控制器主电源开启,且伺服驱动器已使能时,该信号激活。 内部紧急停止 当急停状态由系统内部源触发时激活。 外部紧急停止 当急停状态由连接至安全输入端的外部硬件触发时激活。 系统错误 当控制器检测到阻碍正常运行的严重级硬件或软件故障时激活。 非系统错误 当检测到非严重的、通常可恢复的错误或警告条件时激活。 机器人可操作 当机器人无故障、已上电且处于可接受控制命令的状态时激活。 操作模式 指示机器人控制器当前的运行模式。 安全停止 当触发了配置的安全功能导致的受控停止时激活。不同于紧急停止。 防护停止 当连接的外部防护设备触发了停止机制时激活。 工程意外停止 运行中的程序因内部逻辑错误、运行时异常或外部干扰而中止时,该信号被激活。