Safety Restriction
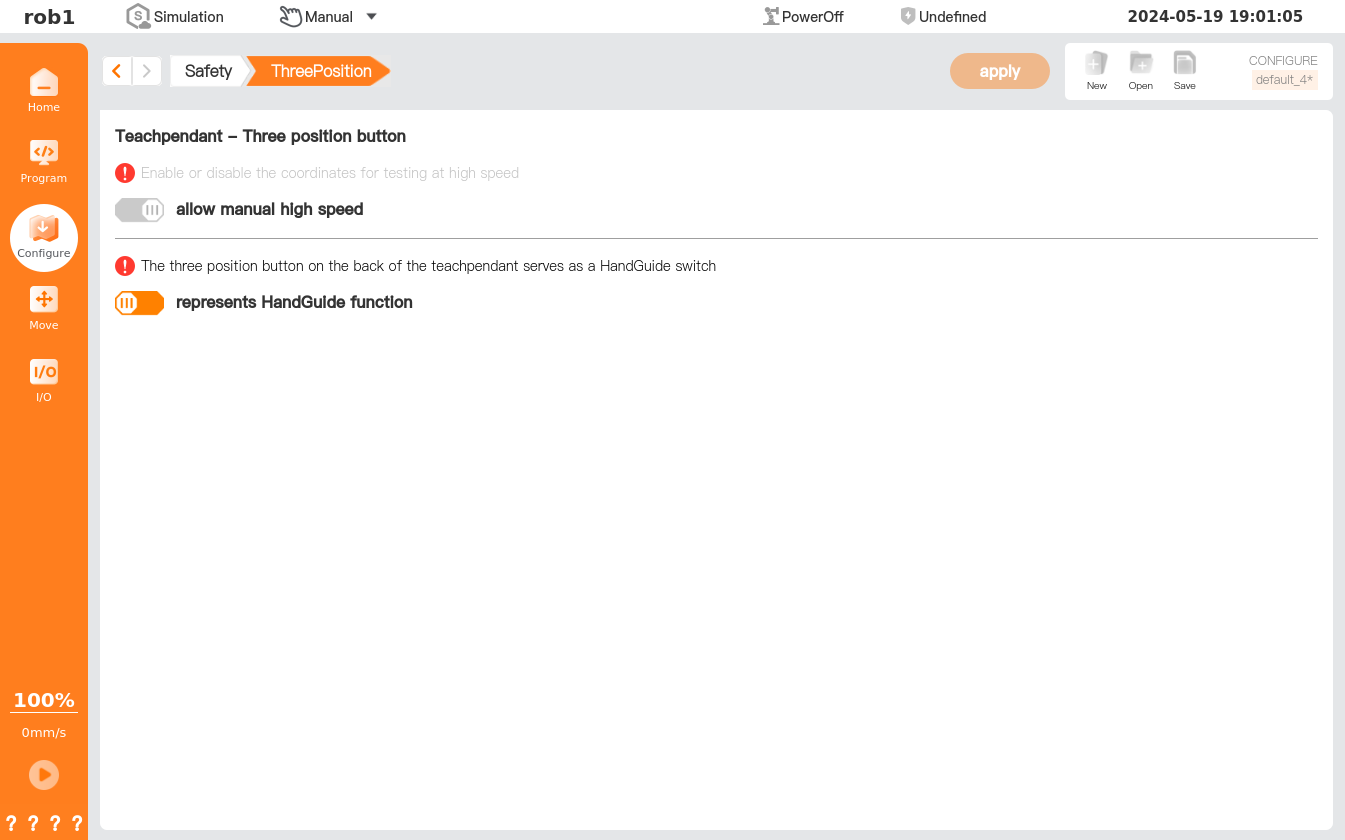
ThreePosition
In the [ThreePosition] page, users can set the function of the three-position button.
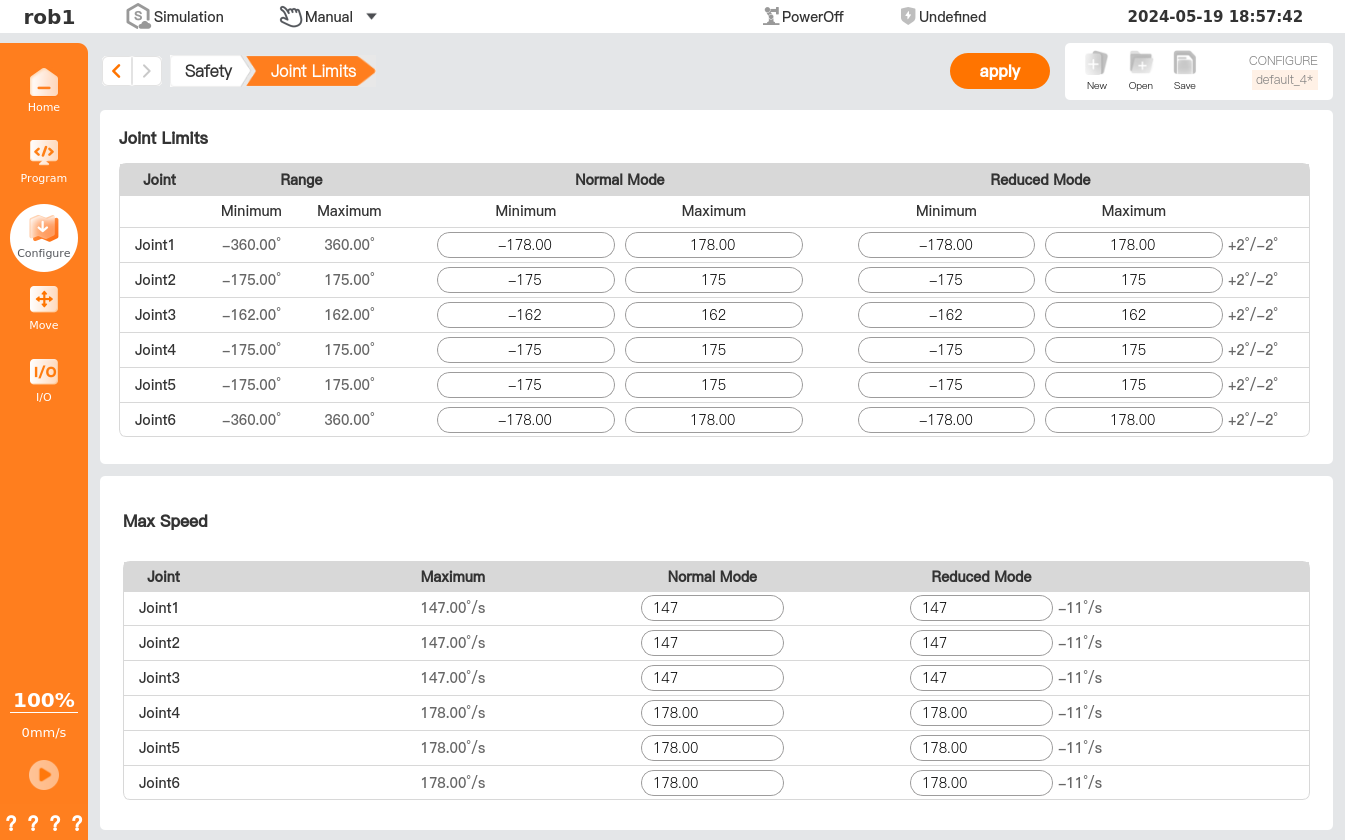
Joint limit
In the [Joint Limits] page, users can set the maximum limit that each joint of the robot arm can reach so as to limit the movement of each joint of the robot arm in the joint space. On this page, users can set the rotation angle of each joint and the joint max speed limit in "normal mode" or "reduced mode."
- When the "reduced mode" and "normal mode" are set at the same time, the value in "reduced mode" shall not be greater than that in "normal mode"; otherwise, the system will prompt a save failure.
- The default values of joint maximum value, joint minimum value, and joint max speed limit are the maximum ranges and can only be modified by the user within the default ranges.
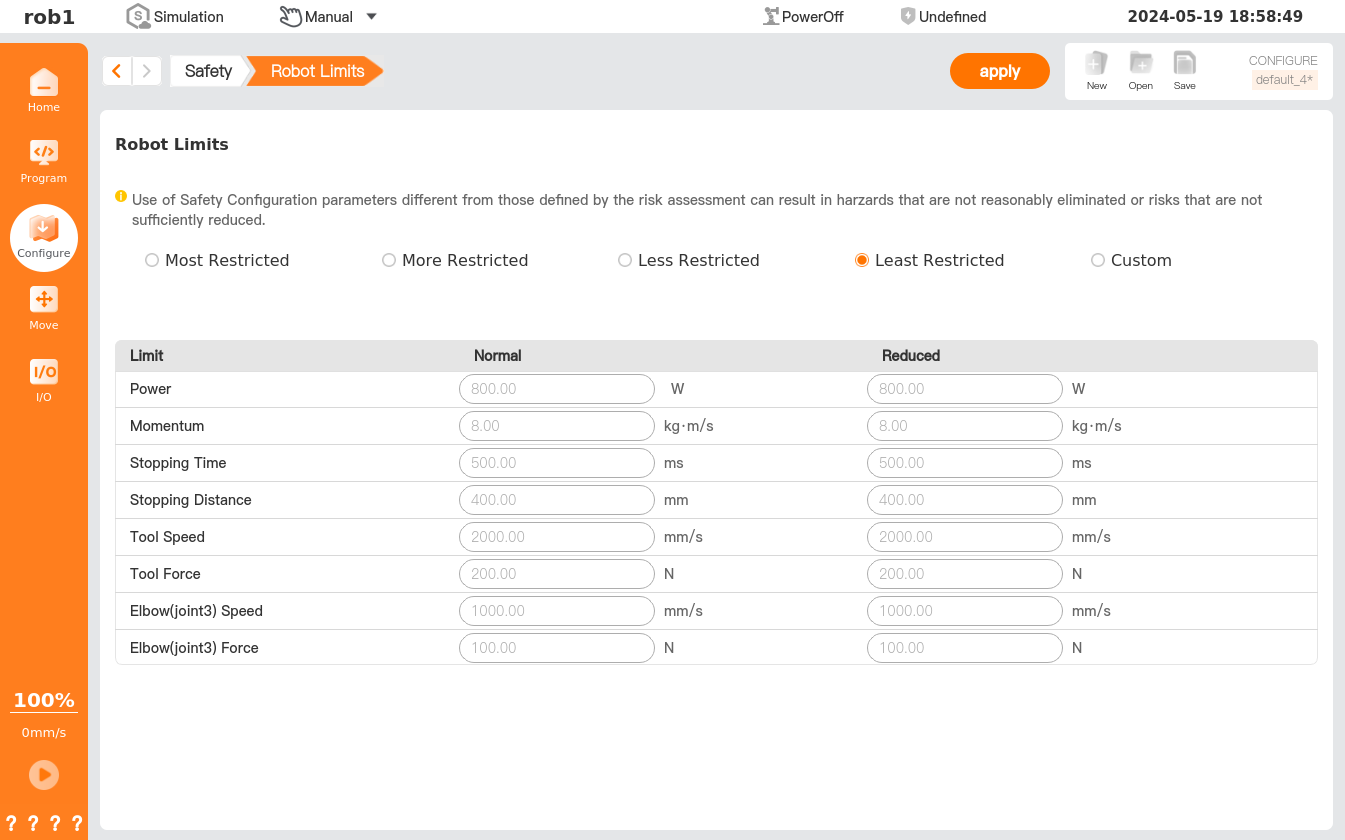
Robot limit
On the [Robot Limits], users can set the limits for robot hardware parameters, including power, momentum, stopping time, stopping distance, tool speed, tool force, elbow (joint 3) speed, and elbow (joint 3) force. The system provides several preset values, and the users can also use custom settings as needed. However, the safety configuration parameters are different from those defined in the risk assessment, which may lead to hazards not being reasonably eliminated or risks not being sufficiently reduced.
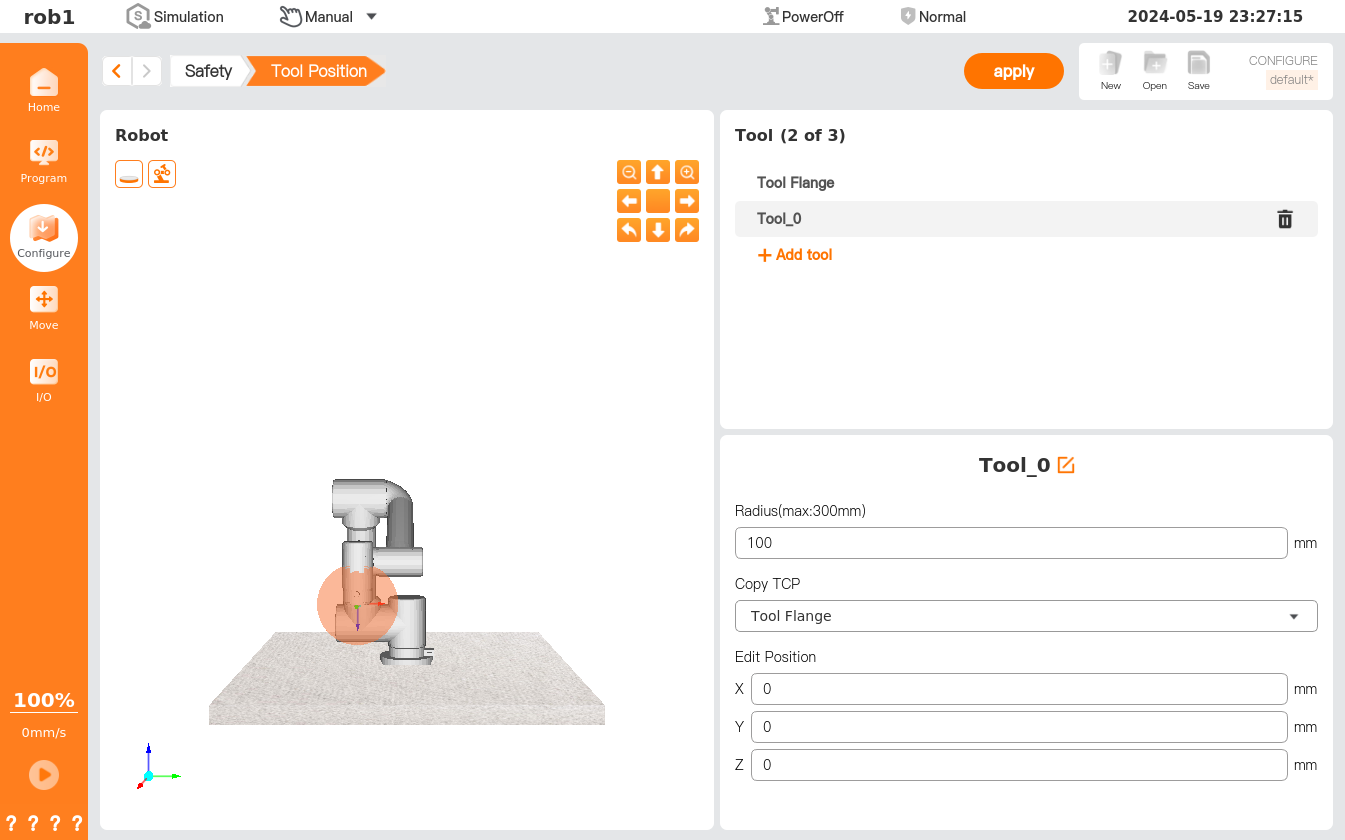
Tool position
In the [Tool Position] page, users can set the spherical envelope of end-of-arm tooling (EOAT) and simulate the shape of the tool through the spherical envelope. This feature is designed to protect the end-of-arm tooling (EOAT) by using the spherical envelope to monitor collisions as TCP approaches a safety plane or an obstacle, thereby protecting the integrity of the end-of-arm tooling (EOAT).
Plane
In the [Planes] page, users can set the safety plane.
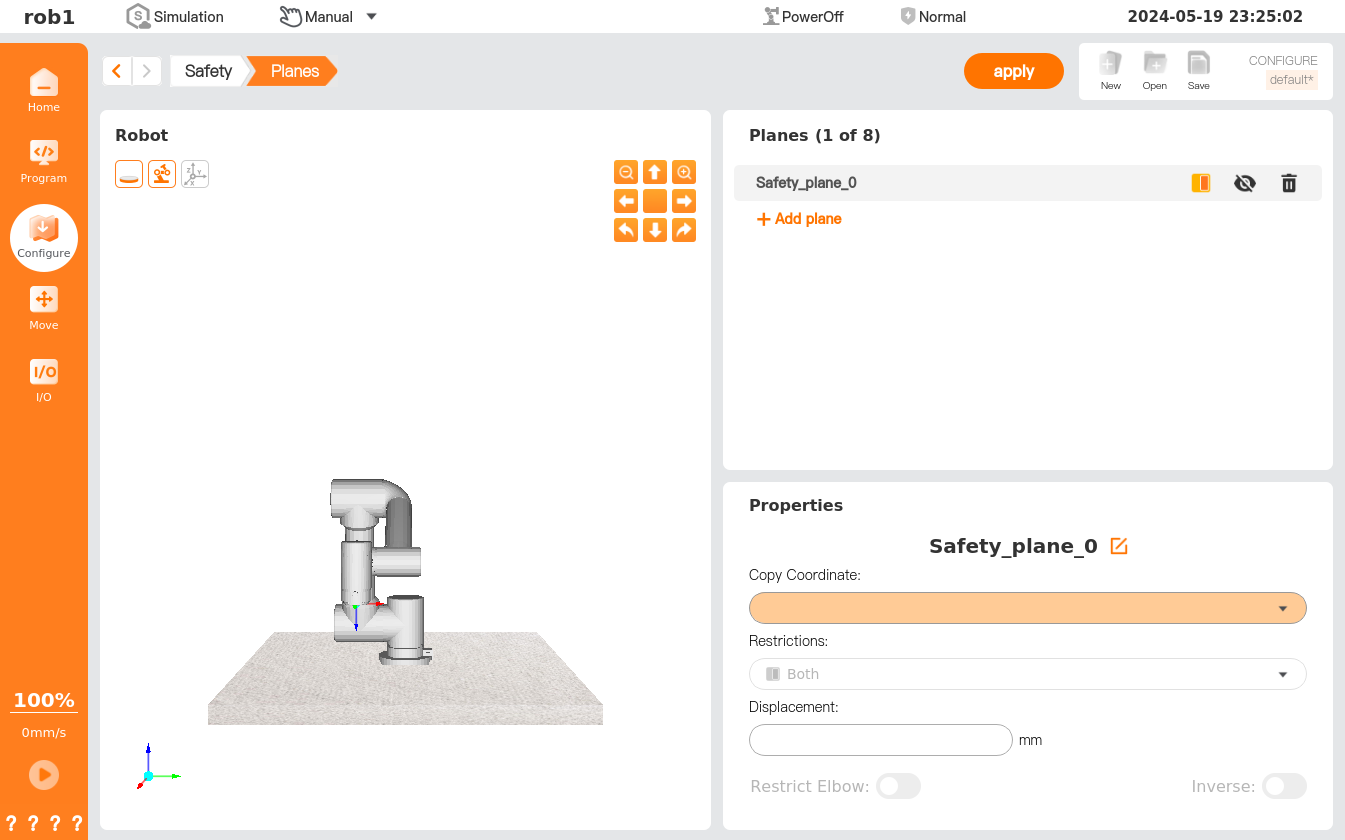
The safety plane supports the following five restriction conditions. Upon selecting a corresponding condition, the robotic arm will trigger different safety protection behaviors based on the current operating mode (Normal Mode/Reduced Mode). Specific details are as follows:
Disable: The current safety plane is not active and provides no protection.
Normal:
The robot arm is currently in normal mode: when the robotic arm moves to the negative direction of the safety plane, a pop-up window appears indicating safety protection has been triggered, and the robotic arm stops moving.
The robot arm is currently in reduced mode: when the robotic arm moves in the negative direction of the safety plane, it can operate normally without triggering safety protection.
Reduced
- The robot arm is currently in normal mode: when the robotic arm moves to the negative direction of the safety plane, it can operate normally without triggering safety protection.
- The robot arm is currently in reduced mode: when the robotic arm moves to the negative direction of the safety plane, a pop-up window appears indicating safety protection has been triggered, and the robotic arm stops moving.
Both
- The robot arm is currently in normal mode: when the robotic arm moves to the negative direction of the safety plane, a pop-up window appears indicating safety protection has been triggered, and the robotic arm stops moving.
- The robot arm is currently in reduced mode: when the robotic arm moves to the negative direction of the safety plane, a pop-up window appears indicating safety protection has been triggered, and the robotic arm stops moving.
Reduced Trigger Mode
- The robot arm is currently in normal mode: when the robotic arm moves to the positive direction of the safety plane, the robotic arm enters reduced mode and continues to operate.
- The robot arm is currently in reduced mode: when the robotic arm moves to the negative direction of the safety plane, the robotic arm continues to operate in reduced mode.
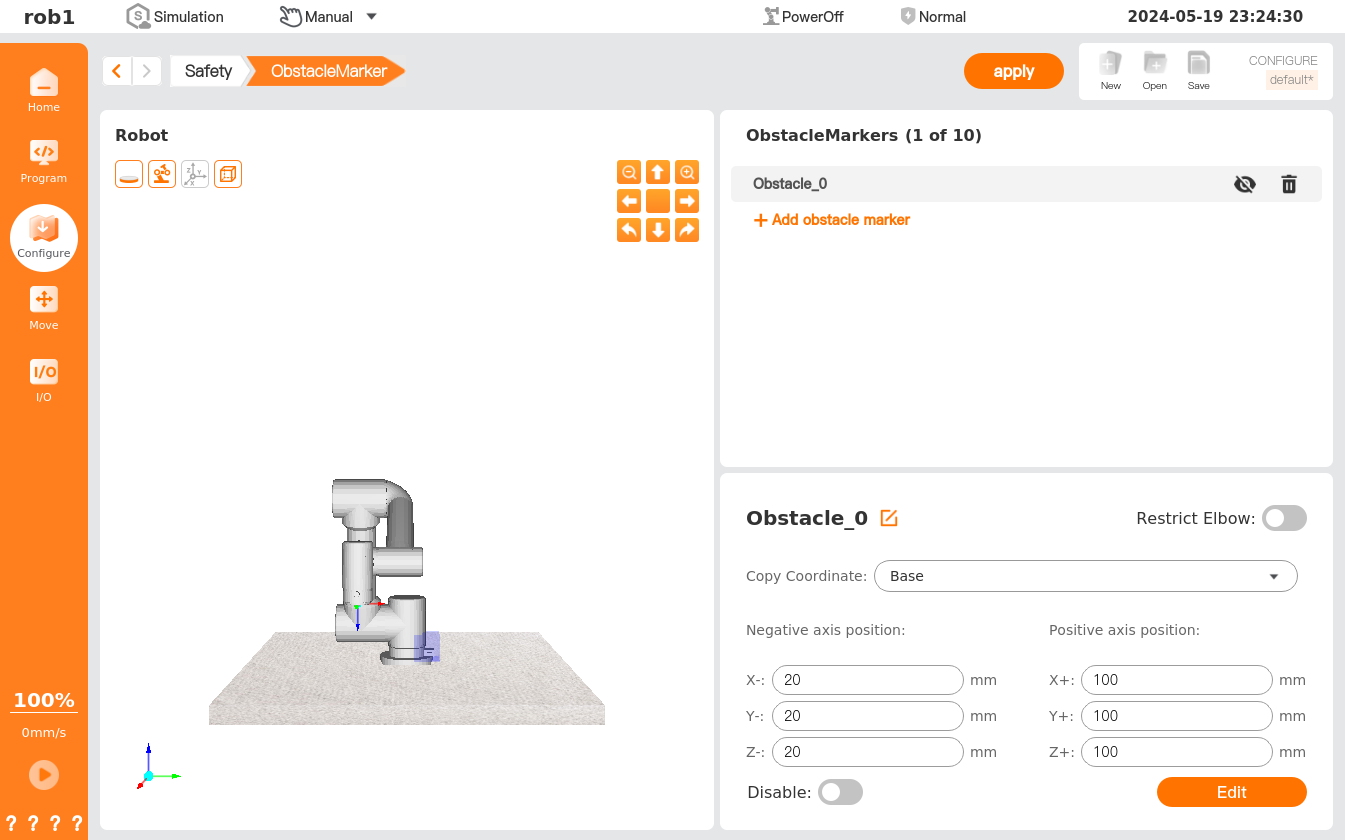
ObstacleMarker
In the [ObstacleMarker] page, users can mark the three-dimensional space where the obstacle is located.